一种基于功分器与合路器加工用自动化机器人的制作方法
本技术涉及自动化机器人,具体为一种基于功分器与合路器加工用自动化机器人。
背景技术:
1、功分器的功能是将一路输入的卫星中频信号均等的分成几路输出,合路器主要用作将多系统信号合路到一套室内分布系统,功分器与合路器主要用于天线阵列,混频器和平衡放大器的馈送网络,完成功率的分配,合成,检测,信号的取样,在对功分器与合路器加工时一般采用自动化机器人进行加工,可以大大提高生产效率。
2、但现有的自动化机器人,机器人与底座之间都是固定连接的为一体式结构,安装时都是采用多个螺栓将底座固定在生产线上的,需要对自动化机器人进行维护拆卸时则需要将底座和机器人一起拆卸下来,费时费力,使用起来极为不便。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种基于功分器与合路器加工用自动化机器人,具备便于安装拆卸的优点,解决了现有的自动化机器人,机器人与底座之间都是固定连接的为一体式结构,安装时都是采用多个螺栓将底座固定在生产线上的,需要对自动化机器人进行维护拆卸时则需要将底座和机器人一起拆卸下来,费时费力,使用起来极为不便的问题。
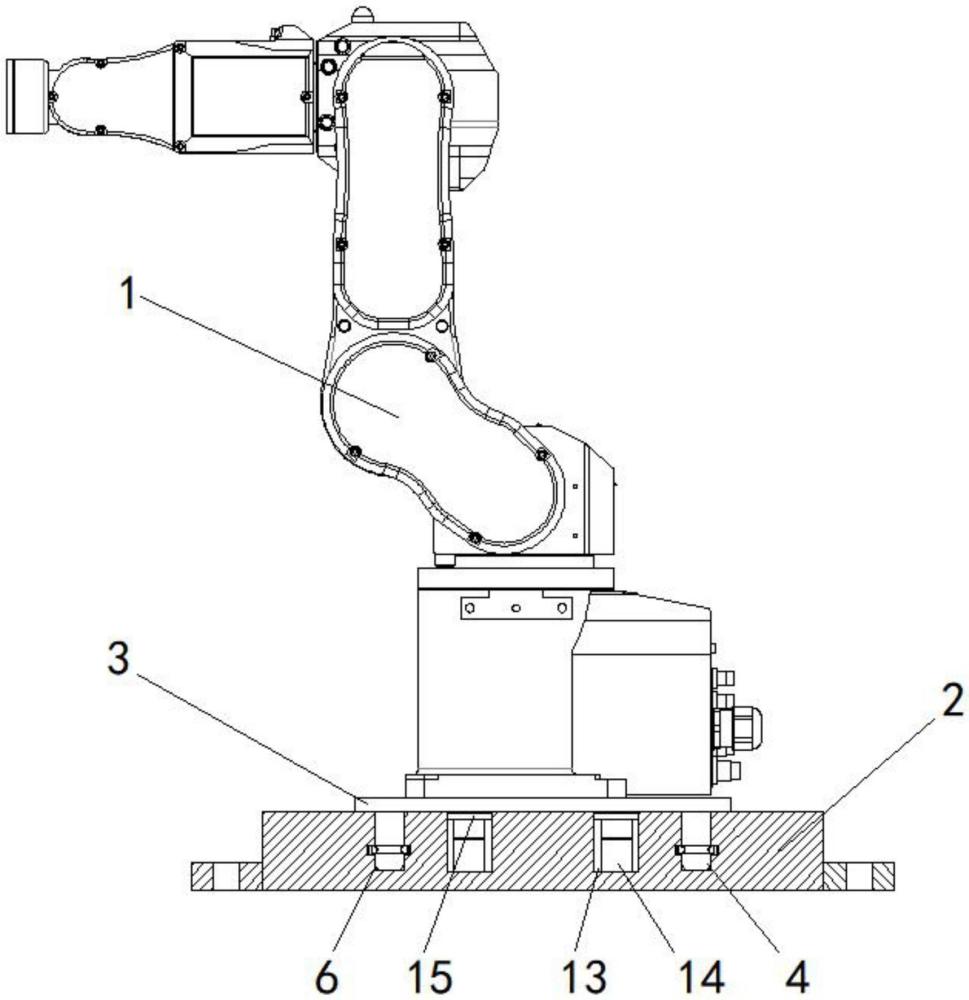
2、为实现上述目的,本实用新型提供如下技术方案:一种基于功分器与合路器加工用自动化机器人,包括自动化机器人和底座,所述自动化机器人和底座上设有拆装机构;
3、所述拆装机构包括固定安装于自动化机器人底部的安装板,所述安装板下表面固定安装有数量为四个的插销,所述插销表面开设有环形槽,所述底座表面开设有数量为四个的固定槽,所述底座内部开设有环形安装仓,所述环形安装仓内活动安装有半环弹片,所述半环弹片表面固定安装有贯穿至固定槽内的卡销,所述插销与固定槽相适配。
4、进一步,所述底座左侧表面和右侧表面均固定安装有固定板,所述固定板表面开设有数量为两个的安装孔。
5、进一步,每个所述半环弹片上的卡销的数量为五个,相邻两个所述卡销之间的间距均相等。
6、进一步,所述卡销远离半环弹片一端为圆弧形,所述卡销与环形槽相适配。
7、进一步,所述固定槽内腔表面开设有与环形安装仓相连通的条形孔,所述卡销位于条形孔内。
8、进一步,所述底座上表面开设有数量为两个的安装槽,所述安装槽内腔下表面固定安装有气缸,所述气缸顶部固定安装有顶板。
9、与现有技术相比,本申请的技术方案具备以下有益效果:
10、该基于功分器与合路器加工用自动化机器人,通过在自动化机器人和底座上设有拆装机构,可以实现自动化机器人与底座的分离和连接,安装时可以将底座固定在是生产线上,再将自动化机器人连接在底座上,当需要对自动化机器人进行维护时只需要将自动化机器人从底座上拆卸下来即可,不小于对底座进行拆卸,使用方便快捷,解决了现有的自动化机器人,机器人与底座之间都是固定连接的为一体式结构,安装时都是采用多个螺栓将底座固定在生产线上的,需要对自动化机器人进行维护拆卸时则需要将底座和机器人一起拆卸下来,费时费力,使用起来极为不便的问题。
技术特征:
1.一种基于功分器与合路器加工用自动化机器人,包括自动化机器人(1)和底座(2),其特征在于:所述自动化机器人(1)和底座(2)上设有拆装机构;
2.根据权利要求1所述的一种基于功分器与合路器加工用自动化机器人,其特征在于:所述底座(2)左侧表面和右侧表面均固定安装有固定板(10),所述固定板(10)表面开设有数量为两个的安装孔(11)。
3.根据权利要求1所述的一种基于功分器与合路器加工用自动化机器人,其特征在于:每个所述半环弹片(8)上的卡销(9)的数量为五个,相邻两个所述卡销(9)之间的间距均相等。
4.根据权利要求1所述的一种基于功分器与合路器加工用自动化机器人,其特征在于:所述卡销(9)远离半环弹片(8)一端为圆弧形,所述卡销(9)与环形槽(5)相适配。
5.根据权利要求1所述的一种基于功分器与合路器加工用自动化机器人,其特征在于:所述固定槽(6)内腔表面开设有与环形安装仓(7)相连通的条形孔(12),所述卡销(9)位于条形孔(12)内。
6.根据权利要求1所述的一种基于功分器与合路器加工用自动化机器人,其特征在于:所述底座(2)上表面开设有数量为两个的安装槽(13),所述安装槽(13)内腔下表面固定安装有气缸(14),所述气缸(14)顶部固定安装有顶板(15)。
技术总结
本技术涉及一种基于功分器与合路器加工用自动化机器人,包括自动化机器人和底座,所述自动化机器人和底座上设有拆装机构,所述拆装机构包括固定安装于自动化机器人底部的安装板,所述安装板下表面固定安装有数量为四个的插销,所述插销表面开设有环形槽,所述底座表面开设有数量为四个的固定槽。该基于功分器与合路器加工用自动化机器人,通过在自动化机器人和底座上设有拆装机构,可以实现自动化机器人与底座的分离和连接,安装时可以将底座固定在是生产线上,再将自动化机器人连接在底座上,当需要对自动化机器人进行维护时只需要将自动化机器人从底座上拆卸下来即可,不小于对底座进行拆卸,使用方便快捷。
技术研发人员:胡碧帆,张艳
受保护的技术使用者:武汉名帆机械有限公司
技术研发日:20230714
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!