一种连接器全自动压配机构的制作方法
一种连接器全自动压配机构
1.技术领域
2.本发明涉及一种连接器加工装置,具体的说是一种连接器全自动压配机构。
背景技术:
3.射频同轴连接器主要包括有外壳、绝缘子、中心导体三个部件,在进行零部件组装时,通常都是由人工将导体插入绝缘子,然后将绝缘子和导体放入外壳,再用气动压力机将绝缘子、导体压到位,传统上,射频同轴连接器普遍是采用多台不同的设备对各道工序分别进行实施,现有的这种组装方式中间转换环节多,费工费时,生产效率非常低且劳动强度非常大。
技术实现要素:
4.本发明要解决的技术问题是提供一种加工快捷方便、省时省力、一体化程度高,从而能提高生产效率并降低劳动强度的连接器全自动压配机构。
5.为了解决上述技术问题,本发明的连接器全自动压配机构,包括能够旋转的分度盘、分度盘上设置的用于对外壳进行操作作业的一号工位、用于对绝缘子进行操作作业的二号工位以及用于对中心导体进行操作作业的三号工位,分度盘上均匀排布有多个下压头,在一号工位处设置有能够将外壳顶入下压头内的一号顶料机构,在二号工位处设置有能够将绝缘子顶入外壳中的二号顶料机构,在三号工位处设置有能够将中心导体顶入绝缘子中的三号顶料机构,分度盘的上方设置有位于三号工位后方的压料机构,通过压料机构能够对预组装的外壳、绝缘子、中心导体进行压实成产品。
6.所述分度盘上还设置有位于压料机构后方的四号工位,所述四号工位处设置有用于将产品抓取移送的抓取装置和用于将产品输出的四号输送装置。
7.所述一号工位处设置有用于将外壳输送到一号工位上的一号输送装置,所述二号工位处设置有用于将绝缘子输送到二号工位上的二号输送装置,所述三号工位处设置有用于将中心导体输送到三号工位上的三号输送装置。
8.所述外壳能够直接横向排列在一号输送装置上,所述二号输送装置的起始端设置有一号程式震动盘,通过所述一号程式震动盘能够使绝缘子的小头端朝下依次排列在二号输送装置上,所述三号输送装置的起始端设置有二号程式震动盘,通过所述二号程式震动盘能够使中心导体的小头端朝下依次排列在三号输送装置上。
9.所述一号顶料机构包括能够将外壳垂直竖起的90度旋转气缸以及能够将垂直竖起后的外壳顶入下压头内的直式顶料气缸。
10.所述二号顶料机构包括一号横向驱动装置、安装在一号横向驱动装置上的能够竖直动作的一号双杠气缸、一号双杠气缸上安装的一号平行气缸和一号手指气缸,所述一号平行气缸能够夹紧绝缘子并通过一号横向驱动装置的水平驱动和一号双杠气缸的竖直运
动下将夹紧的绝缘子利用一号手指气缸顶入外壳中。
11.所述三号顶料机构包括二号横向驱动装置、安装在二号横向驱动装置上的能够竖直动作的二号双杠气缸、二号双杠气缸上安装的二号平行气缸和二号手指气缸,所述二号平行气缸能够夹紧中心导体并通过二号横向驱动装置的水平驱动和二号双杠气缸的竖直运动下将夹紧的中心导体利用二号手指气缸顶入绝缘子中。
12.所述抓取装置包括三号横向驱动装置、安装在三号横向驱动装置上的能够竖直动作的三号双杠气缸、三号双杠气缸上安装的y型手爪气缸,所述y型手爪气缸能够抓住压实的产品并通过三号横向驱动装置的水平驱动和三号双杠气缸的竖直运动将产品移送到四号输送装置上。
13.所述压料机构为压力气缸,所述压力气缸上设置有上压头。
14.所述分度盘由分度电机驱动旋转。
15.本发明的优点在于:通过设置的排布有下压头的分度盘以及分度盘上设置的用于对外壳进行操作作业的一号工位、用于对绝缘子进行操作作业的二号工位以及用于对中心导体进行操作作业的三号工位,由此可以依次通过各个工位对外壳、绝缘子、中心导体进行流水作业预组装,然后再通过设置的压料机构压实成产品,只需将外壳采用人工排列即可,其他工序的整个过程均不需要人工参与,降低了劳动强度的同时减少了人工参与环节,减少3/4的人工,安全性也得到了提高,另外,大幅度一体化的作业流程,加工快捷方便、省时省力,大幅度提高了工作效率,节约了生产成本,另外,通过各个工位处设置的顶料机构、压料机构以及抓取装置等机械部件的设计,极大提高了连接器外壳、绝缘子、导体安装的合格率,进一步降低了生产成本。
附图说明
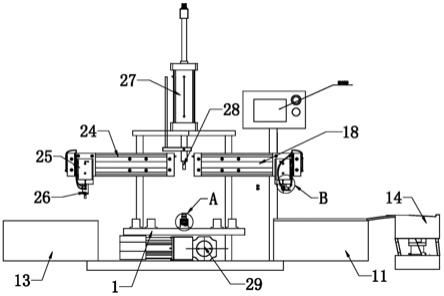
16.图1为本发明连接器全自动压配机构的主视结构示意图;图2为本发明连接器全自动压配机构的俯视结构示意图;图3为图1的a处放大结构示意图;图4为图1的b处放大结构示意图;图5为本发明中二号平行气缸和二号手指气缸安装状态的仰视结构示意图;图6为本发明中y型手爪气缸的安装状态侧视结构示意图;图7为图6的俯视结构示意图;图8为本发明中中心导体排列状态结构示意图;图9为本发明中上压头的结构示意图;图10为产品结构示意图。
具体实施方式
17.下面结合附图与具体实施方式,对本发明的连接器全自动压配机构作进一步详细说明。
18.如图所示,本发明的连接器全自动压配机构,包括分度盘1、分度盘上设置的用于对外壳2进行操作作业的一号工位3、用于对绝缘子4进行操作作业的二号工位5以及用于对
中心导体6进行操作作业的三号工位7,分度盘1由一台分度电机29驱动旋转,分度盘1上均匀排布有多个下压头8,在一号工位3处设置有能够将外壳2顶入下压头8内的一号顶料机构,一号工位3的起始端设置有用于将外壳2输送到一号工位上的一号输送装置10,通过一号输送装置10能够将外壳输送到一号工位上,所说的一号输送装置10优选为一号皮带输送机,外壳2能够采用人工方式直接横向排列在一号皮带输送机上,在二号工位5处设置有能够将绝缘子4顶入外壳2中的二号顶料机构,二号工位5的起始端设置有用于将绝缘子4输送到二号工位上的二号输送装置11,所说的二号输送装置11优选为二号皮带输送机,当然,二号输送装置11的起始端设置有一号程式震动盘14,通过一号程式震动盘14能够使绝缘子的小头端朝下自动依次排列在二号输送装置11上,在三号工位7处设置有能够将中心导体6顶入绝缘子4中的三号顶料机构,三号工位7的起始端设置有用于将中心导体6输送到三号工位上的三号输送装置12,所说的三号输送装置12优选为三号皮带输送机,当然,三号输送装置12的起始端设置有二号程式震动盘15,通过二号程式震动盘15能够使中心导体6的小头端朝下依次排列在三号输送装置12上,分度盘1的上方设置有位于三号工位后方的压料机构,其中,所说的压料机构为压力气缸27,压力气缸27上设置有上压头28,通过压料机构的上压头28能够对预组装的外壳、绝缘子、中心导体进行压实成产品,分度盘上还设置有位于压料机构后方的四号工位9,四号工位9处设置有用于将产品抓取移送的抓取装置和用于将抓取的产品输出的四号输送装置13,四号输送装置优选为四号皮带输送机。
19.进一步地,所说的一号顶料机构包括能够将外壳2垂直竖起的90度旋转气缸16以及能够将垂直竖起后的外壳2顶入下压头内的直式顶料气缸17,所说的二号顶料机构包括一号横向驱动装置18、安装在一号横向驱动装置上的能够竖直动作的一号双杠气缸19、一号双杠气缸上安装的一号平行气缸20和一号手指气缸21,一号平行气缸20能够夹紧绝缘子4并通过一号横向驱动装置的水平驱动和一号双杠气缸的竖直运动下将夹紧的绝缘子利用一号手指气缸21顶入外壳中,所说的一号横向驱动装置优选为一号无杆气缸,三号顶料机构包括二号横向驱动装置22、安装在二号横向驱动装置上的能够竖直动作的二号双杠气缸23、二号双杠气缸上安装的二号平行气缸和二号手指气缸,二号平行气缸能够夹紧中心导体6并通过二号横向驱动装置22的水平驱动和二号双杠气缸的竖直运动下将夹紧的中心导体利用二号手指气缸顶入绝缘子4中,所说的二号横向驱动装置优选为二号无杆气缸。
20.再进一步地,所说的抓取装置包括三号横向驱动装置24、安装在三号横向驱动装置上的能够竖直动作的三号双杠气缸25、三号双杠气缸上安装的y型手爪气缸26,y型手爪气缸26能够抓住压实的产品并通过三号横向驱动装置的水平驱动和三号双杠气缸的竖直运动将产品移送到四号输送装置13上,所说的三号横向驱动装置优选为三号无杆气缸。
21.其工作原理如下:步骤一:1、将外壳2依次排放在一号皮带输送机的输送带上。
22.2、将绝缘子4倒入一号程式震动盘14内,启动一号程式震动盘14使绝缘子小头朝下依次排列在二号皮带输送机的输送带上。
23.3、将中心导体6倒入二号程式震动盘15内,启动二号程式震动盘15,使中心导体如图8所示排列在三号皮带输送机的输送带上。
24.步骤二:
启动系统通过分度电机29驱动分度盘开始工作,各工位动作如下:1、90度旋转气缸16将外壳垂直竖起,直式顶料气缸将外壳顶入下压头,等分度盘旋转时,90度旋转气缸复位滚入下一个工件(外壳)。
25.2、一号平行气缸20打开,一号双杠气缸19伸出,一号平行气缸20的手爪夹紧绝缘子,一号双杠气缸19退回,一号无杆气缸将由一号双杠气缸19、一号平行气缸20和一号手指气缸21构成的一号机械手移到最前端,一号双杠气缸19伸出,一号平行气缸20的手爪松开同时手指气缸将绝缘子顶入外壳中,一号平行气缸20的手爪退回、一号双杠气缸19退回,一号无杆气缸移到起点位置。
26.3、二号平行气缸打开,二号双杠气缸23伸出,二号平行气缸的手爪夹紧绝缘子,二号双杠气缸23退回,二号无杆气缸将由二号双杠气缸23、二号平行气缸和二号手指气缸构成的一号机械手移到最前端(图中未示出),二号双杠气缸23伸出,二号平行气缸的手爪松开同时手指气缸将中心导体顶入绝缘子中,二号平行气缸的手爪退回、二号双杠气缸23退回,二号无杆气缸移到起点位置。
27.4、压力气缸伸出通过上压头将绝缘子压人外壳、中心导体压入绝缘子中,也就是说通过压料机构的上压头28对预组装的外壳、绝缘子、中心导体进行压实成产品。
28.5、y型手爪气缸26上的y型手爪打开,三号无杆气缸将由三号双杠气缸25及三号双杠气缸上安装的y型手爪气缸26构成的三号机械手移到最前端,三号双杠气缸25伸出,y型手爪气缸26上的y型手爪夹紧,抓住工件(组装后的产品),三号双杠气缸25退回,三号无杆气缸移到起点位置,y型手爪松开,工件放在四号皮带输送机的输送带上。
29.当分度盘每移动一个位置步骤二同时一次动作,形成自动压配,只需要人工将外壳排放在一号皮带输送机的输送带上,减少人工参与环节,减少3/4人工,安全性好。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1