铝合金风机叶轮低热量自动焊接装置的制作方法
1.本发明属于焊接装置技术领域,尤其涉及一种铝合金风机叶轮低热量自动焊接装置。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。由于风机叶轮需要进行多角度的焊接,故现有技术中大都采人工焊接的方式,费时费力,生产效益较低。
3.例如,中国实用新型专利公开了一种自动焊接机构[申请号:201921939507.8],该实用新型专利焊接装置上安装有伺服电机控制的浮动焊接盘、水平推送气缸、压紧气缸一、压紧气缸二、焊机定位装置及固定点焊机;焊接装置在水平推送气缸、伺服电机、减速器、压紧气缸一和压紧气缸二以及固定点焊机的共同作用下完成零件的自动焊接;所述焊接装置的底座一上安装有滑块、水平推送气缸的缸体及缓冲器,减速器固定板安装在滑块上,并通过浮动接头与水平推送气缸的活塞杆连接,水平推送气缸的缸体上安装有回位置磁性开关及出位置磁性开关,滑块与底座一上的滑轨滑动配合,底座二安装在减速器固定板上,减速器安装在减速器固定板背面,伺服电机安装在减速器上,带座轴承安装在减速器固定板正面,浮动焊接盘通过带座轴承与减速器装配在一起,浮动焊接盘上安装有部品定位装置,压紧气缸一和压紧气缸二及用于检测焊接位置有无零件的感应器一安装在底座二上,减速器固定板上安装有用于检测浮动焊接盘原点位置的感应器二,焊接装置通过焊机定位装置与固定点焊机装配。
[0004]
该实用新型可实现自动焊接,但其仍不能直接应用于风机叶轮的焊接中,故仍未解决上述问题。
技术实现要素:
[0005]
本发明的目的是针对上述问题,提供一种自动化程度高的铝合金风机叶轮低热量自动焊接装置。
[0006]
为达到上述目的,本发明采用了下列技术方案:
[0007]
一种铝合金风机叶轮低热量自动焊接装置,包括安装平台和固定设置在安装平台上的焊接机器人,所述焊接机器人的端部设有焊接头,还包括用于安装风机叶轮且可带动风机叶轮发生翻转和旋转的叶轮安装组件,所述叶轮安装组件位于焊接机器人的一侧且与安装平台固定连接。
[0008]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述焊接头为激光焊接头。
[0009]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述叶轮安装组件设有两个,且对称设置在焊接机器人的两侧。
[0010]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述叶轮安装组件包括固定连接在安装平台上的组件框架,所述底板上设有翻转组件,所述翻转组件上连接有转动驱动
组件,所述转动驱动组件的一端驱动连接有用于安装风机叶轮的安装盘。
[0011]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述翻转组件包括翻转板,所述转动驱动组件连接在翻转板上,还包括至少一个固定连接在组件框架上的驱动电机,所述翻转板的一端通过摆臂与驱动电机的输出轴驱动连接,所述摆臂一端固定连接在输出轴上,另一端沿输出轴的径向延伸并与翻转板的端部相连。
[0012]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述驱动电机设有两个且分别通过两个摆臂与翻转板的两端相连;所述摆臂靠近翻转板的一端设有弯折部,所述弯折部位于翻转板下方且与翻转板底面相贴合,所述弯折部的延伸方向与翻转板的延伸方向相平行。
[0013]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述转动驱动组件包括固定连接在翻转板上的箱体,所述箱体内具有容纳空腔,驱动电机设置在容纳空腔内,驱动电机驱动连接有旋转盘,所述安装盘固定连接在旋转盘上,所述旋转盘的一侧还设有顶紧组件,所述顶紧组件连接在翻转板上且顶紧组件的一端压设在旋转盘侧面。
[0014]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述箱体上还设有镂空的通风孔,所述通风孔与容纳空腔相连通。
[0015]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述顶紧组件包括固定连接在旋转盘上的安装板,所述安装板上固定连接有两块相对设置的导向块,所述导向块内表面上设有向导向块内部凹陷的导向槽,顶紧块滑动连接在导向槽内,所述顶紧块的一侧设有弹簧,所述弹簧远离顶紧块的一端压设在安装板上。
[0016]
在上述的铝合金风机叶轮低热量自动焊接装置中,所述顶紧块靠近旋转盘的一端表面呈弧形;所述安装板上还设有调节螺钉,所述调节螺钉表面凸出有一圈呈环形的调节凸檐,所述弹簧远离顶紧块的一端压设在调节凸檐上,转动调节螺钉可使调节螺钉沿轴心线方向移动。
[0017]
与现有的技术相比,本发明的优点在于:
[0018]
1、本发明将风机叶轮安装在叶轮安装组件上,叶轮安装组件可带动风机叶轮发生翻转和旋转,从而方便焊接机器人对风机叶轮进行多角度焊接,实现了风机叶轮焊接的自动化,提高了生产效益。
[0019]
2、本发明采用激光焊接,激光焊接焊缝美观,因为热量集中,焊接效率远高于气保焊,降低了焊接过程中产生的热量。
[0020]
3、本发明的叶轮安装组件具有两个,且对称设置在焊接机器人两侧,焊接机器人在焊接的同时人工可以在另一边进行上下料,节约了焊接机器人等待上下料的时间,提高了焊接机器人的利用率。
附图说明
[0021]
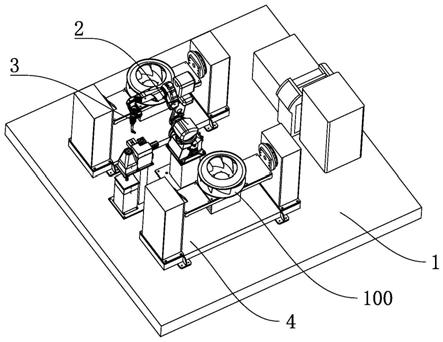
图1是本发明的结构示意图;
[0022]
图2是叶轮安装组件的结构示意图;
[0023]
图3是叶轮安装组件部分结构的结构示意图;
[0024]
图4是顶紧组件的结构示意图;
[0025]
图5是调节螺钉的结构示意图;
[0026]
图中:安装平台1、焊接机器人2、焊接头3、叶轮安装组件4、调节螺钉5、调节凸檐6、底板41、翻转组件42、转动驱动组件43、安装盘44、风机叶轮100、翻转板421、摆臂422、输出轴423、弯折部424、箱体431、旋转盘432、顶紧组件433、通风孔434、安装板435、导向块436、导向槽437、顶紧块438、弹簧439。
具体实施方式
[0027]
下面结合附图和具体实施方式对本发明做进一步详细的说明。
[0028]
如图1所示,一种铝合金风机叶轮低热量自动焊接装置,包括安装平台1和固定设置在安装平台1上的焊接机器人2,所述焊接机器人2的端部设有焊接头3,还包括用于安装风机叶轮100且可带动风机叶轮100发生翻转和旋转的叶轮安装组件4,所述叶轮安装组件4位于焊接机器人2的一侧且与安装平台1固定连接。
[0029]
本发明,使用时,将待焊接的风机叶轮100安装至叶轮安装组件4上,焊接过程中,叶轮安装组件4带动风机叶轮100发生翻转和转动,以方便焊接机器人2端部的焊接头3对风机叶轮100各个角度进行焊接。故本发明将风机叶轮100安装在叶轮安装组件4上,叶轮安装组件4可带动风机叶轮100发生翻转和旋转,从而方便焊接机器人2对风机叶轮100进行多角度焊接,实现了风机叶轮100焊接的自动化,提高了生产效益。
[0030]
优选地,所述焊接头3为激光焊接头。本发明采用激光焊接,激光焊接焊缝美观,因为热量集中,焊接效率远高于气保焊,降低了焊接过程中产生的热量。
[0031]
优选地,所述叶轮安装组件4设有两个,且对称设置在焊接机器人2的两侧。本发明的叶轮安装组件4具有两个,且对称设置在焊接机器人2两侧,焊接机器人2在焊接的同时人工可以在另一边进行上下料,节约了焊接机器人2等待上下料的时间,提高了焊接机器人2的利用率。
[0032]
结合图2和图3所示,所述叶轮安装组件4包括固定连接在安装平台1上的组件框架41,所述底板41上设有翻转组件42,所述翻转组件42上连接有转动驱动组件43,所述转动驱动组件43的一端驱动连接有用于安装风机叶轮100的安装盘44。转动驱动组件43实现对风机叶轮100驱动转动,翻转组件42带动风机叶轮100翻转。
[0033]
具体的说,所述翻转组件42包括翻转板421,所述转动驱动组件43连接在翻转板421上,还包括至少一个固定连接在组件框架41上的驱动电机(图中未示出),所述翻转板421的一端通过摆臂422与驱动电机的输出轴423驱动连接,所述摆臂422一端固定连接在输出轴423上,另一端沿输出轴423的径向延伸并与翻转板421的端部相连。所述转动驱动组件43包括固定连接在翻转板421上的箱体431,所述箱体431内具有容纳空腔,驱动电机(图中未示出)设置在容纳空腔内,驱动电机驱动连接有旋转盘432。
[0034]
使用时,风机叶轮100固定设置在安装盘44上,驱动电机驱动旋转盘432转动从而带动安装盘44和风机叶轮100旋转,设置在组件框架41上的驱动电机通过输出轴423带动摆臂422摆动,从而使得翻转板421发生翻转,翻转板421带动风机叶轮100和转动驱动组件43整体发生翻转。
[0035]
优选地,所述驱动电机设有两个且分别通过两个摆臂422与翻转板421的两端相连。对翻转板421两端同时施力使得翻转板421摆动过程更加稳定。
[0036]
如图3所示,所述摆臂422靠近翻转板421的一端设有弯折部424,所述弯折部424位
于翻转板421下方且与翻转板421底面相贴合,所述弯折部424的延伸方向与翻转板421的延伸方向相平行。通过弯折部424与翻转板421相连接,可以增大连接面积,使得摆臂422驱动翻转板421更加稳定。
[0037]
如图3所示,所述箱体431上还设有镂空的通风孔434,所述通风孔434与容纳空腔相连通。通风孔434可增加散热效果,防止驱动电机温度过高。
[0038]
结合图3
‑
5所示,所述安装盘44固定连接在旋转盘432上,所述旋转盘432的一侧还设有顶紧组件433,所述顶紧组件433连接在翻转板421上且顶紧组件433的一端压设在旋转盘432侧面,所述顶紧组件433包括固定连接在旋转盘432上的安装板435,所述安装板435上固定连接有两块相对设置的导向块436,所述导向块436内表面上设有向导向块436内部凹陷的导向槽437,顶紧块438滑动连接在导向槽437内,所述顶紧块438的一侧设有弹簧439,所述弹簧439远离顶紧块438的一端压设在安装板435上。顶紧块438顶紧在旋转盘432侧面,可以保证翻转板421翻转后,旋转盘432处于倾斜状态时仍能稳定转动。
[0039]
优选地,所述顶紧块438靠近旋转盘432的一端表面呈弧形。这样可以使得顶紧块438端部能更好的贴合在旋转盘432侧面。
[0040]
如图5所示,所述安装板435上还设有调节螺钉5,所述调节螺钉5表面凸出有一圈呈环形的调节凸檐6,所述弹簧439远离顶紧块438的一端压设在调节凸檐6上,转动调节螺钉5可使调节螺钉5沿轴心线方向移动。转动调节螺钉5可通过调节凸檐6调节弹簧439的松紧程度,从而调节顶紧块438的顶紧力。
[0041]
本发明的工作原理是:使用时,风机叶轮100固定设置在安装盘44上,焊接过程中,驱动电机驱动旋转盘432转动从而带动安装盘44和风机叶轮100旋转,设置在组件框架41上的驱动电机通过输出轴423带动摆臂422摆动,从而使得翻转板421发生翻转,翻转板421带动风机叶轮100和转动驱动组件43整体发生翻转,以方便焊接机器人2端部的焊接头3对风机叶轮100各个角度进行焊接。故本发明将风机叶轮100安装在叶轮安装组件4上,叶轮安装组件4可带动风机叶轮100发生翻转和旋转,从而方便焊接机器人2对风机叶轮100进行多角度焊接,实现了风机叶轮100焊接的自动化,提高了生产效益。
[0042]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
[0043]
尽管本文较多地使用了安装平台1、焊接机器人2、焊接头3、叶轮安装组件4、调节螺钉5、调节凸檐6、底板41、翻转组件42、转动驱动组件43、安装盘44、风机叶轮100、翻转板421、摆臂422、输出轴423、弯折部424、箱体431、旋转盘432、顶紧组件433、通风孔434、安装板435、导向块436、导向槽437、顶紧块438、弹簧439等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1