切坡口参考线重定位方法、装置、设备及存储介质与流程
1.本发明涉及智能切割的技术领域,尤其涉及一种切坡口参考线重定位方法、装置、设备及存储介质。
背景技术:
2.在智能切割领域,待切割的工件,常常因来料一致性不足,其实际尺寸与图纸存在一定偏差,如图1所示,实线部分为工件在图纸中的形状,虚线部分为工件的实际形状。以图纸中模板的工件边缘轮廓作为实际的工件边缘轮廓,存在尺寸偏差,导致定位偏差,切割不精准。因此,如何降低定位偏差,提高切坡口定位准确性是亟待解决的技术问题。
3.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
4.本发明的主要目的在于提供一种切坡口参考线重定位方法、装置、设备及计算机存储介质,旨在解决现有技术中因来料与图纸中工件尺寸存在偏差,导致切坡口定位不准确的技术问题。
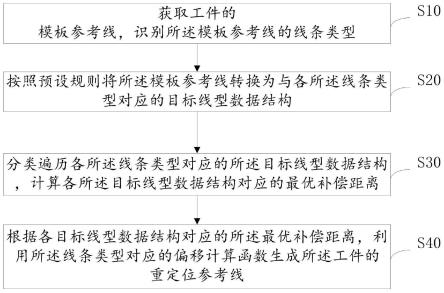
5.为实现上述目的,本发明提供一种切坡口参考线重定位方法,所述切坡口参考线重定位方法包括以下步骤:
6.获取工件的模板参考线,识别所述模板参考线的线条类型;
7.按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构;
8.分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离;
9.根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成所述工件的重定位参考线。
10.优选地,所述分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离,包括:
11.分类遍历各所述线条类型对应的所述目标线型数据结构,计算遍历到的目标线型数据结构的偏移点云与实际工件轮廓的统计距离误差;
12.选取所述统计距离误差的最小值,作为各目标线型数据结构对应的最优补偿距离。
13.优选地,所述分类遍历各所述线条类型对应的所述目标线型数据结构,计算遍历到的目标线型数据结构的偏移点云与实际工件轮廓的统计距离误差,包括:
14.分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云;
15.对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和;
16.计算所述目标点云中所有点的所述距离之和的距离平均和,将所述距离平均和作为所述当前线型数据结构的偏移点云与实际工件轮廓的统计距离误差。
17.优选地,所述对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和,包括:
18.根据工件实际轮廓点云创建kd搜索树;
19.利用kd搜索树在预设搜索半径范围内对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和。
20.优选地,所述目标线型数据结构包括直线数据结构;
21.所述分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云,包括:
22.记存储模板参考线的所有直线数据结构的集合为
23.遍历所述集合中的所有直线元素根据所述直线元素利用线偏移计算函数,生成偏移线
24.创建空的点云c;
25.计算所述偏移线的线段长度l和线段方向d;
26.从初始值开始每间隔预设长度l0向所述点云c中添加点pi,其中,
27.pi=ps+kid,ki=i
·
l0(0≤ki≤l)
28.ps为所述偏移线的线段起点,i=0、1、2、......、l/l0;
29.若所述预设长度l0不能整除所述线段长度l,则将所述偏移线的线段终点pe添加至所述点云c,生成所述偏移线对应的点云c
ik
。
30.优选地,所述目标线型数据结构包括圆弧数据结构;
31.所述分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云,包括:
32.记存储模板参考线的所有圆弧数据结构的集合为
33.遍历所述集合中所有圆弧元素根据所述圆弧元素利用圆弧偏移计算函数,生成偏移圆弧
34.根据圆弧的圆心计算函数,计算所述偏移圆弧的圆心pc;
35.计算离心向量和圆弧半径;
36.创建空的点云c;
37.设置分辨率,根据所述圆弧半径和所述分辨率计算离散单位角度θ0;
38.计算圆弧的总夹角δθ;
39.根据所述离心向量计算圆弧的旋转轴nr;
40.从初始值开始间隔所述离散单位角度θ0向点云c中添加点pi,以所述圆弧元素的圆弧起点ps为旋转起点、圆心pc为旋转轴心、旋转轴nr、kθ0(k=0,1,2,...)为旋转角度,得到点pi;
41.若θ0不能整除所述总夹角δθ,则将所述偏移圆弧的圆弧终点添加至所述点云c,生成所述偏移圆弧对应的点云c
jk
。
42.优选地,所述根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成重定位参考线之后,还包括:
43.计算重定位参考线的相邻两端的交点;
44.根据所述交点对所述重定位参考线进行剪裁,获得最终参考线。
45.此外,为实现上述目的,本发明还提出一种切坡口参考线重定位装置,所述切坡口参考线重定位装置包括:
46.获取模块,用于获取工件的模板参考线,识别所述模板参考线的线条类型;
47.转换模块,用于按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构;
48.计算模块,用于分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离;
49.所述计算模块,还用于根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成所述工件的重定位参考线。
50.此外,为实现上述目的,本发明还提出一种切坡口参考线重定位设备,所述切坡口参考线重定位设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的切坡口参考线重定位程序,所述切坡口参考线重定位程序被所述处理器执行时实现如上文所述的切坡口参考线重定位方法的步骤。
51.此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有切坡口参考线重定位程序,所述切坡口参考线重定位程序被处理器执行时实现如上文所述的切坡口参考线重定位方法的步骤。
52.本发明中,通过获取模板参考线,识别所述模板参考线的线条类型,按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构,分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离,通过计算最优补偿距离,提高识别尺寸偏差的准确度;根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成重定位参考线,参考线每个直线、圆弧都是单独进行重定位的,可适应局部尺寸偏差。
附图说明
53.图1是图纸工件模板与实际工件的尺寸偏差示意图;
54.图2是本发明实施例方案涉及的硬件运行环境的切坡口参考线重定位设备的结构示意图;
55.图3为本发明切坡口参考线重定位方法第一实施例的流程示意图;
56.图4为本发明切坡口参考线重定位方法实施例中线偏移计算函数示意图;
57.图5为本发明切坡口参考线重定位方法实施例中圆弧偏移计算函数;
58.图6为本发明切坡口参考线重定位方法实施例中圆弧的优劣弧示意图;
59.图7为本发明切坡口参考线重定位方法实施例中参考线重定位前、后对比图;
60.图8为本发明切坡口参考线重定位装置第一实施例的结构框图。
61.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
62.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
63.参照图2,图2为本发明实施例方案涉及的硬件运行环境的切坡口参考线重定位设备结构示意图。
64.如图2所示,该切坡口参考线重定位设备可以包括:处理器1001,例如中央处理器(central processing unit,cpu),通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display),可选用户接口1003还可以包括标准的有线接口、无线接口,对于用户接口1003的有线接口在本发明中可为usb接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如无线保真(wireless-fidelity,wi-fi)接口)。存储器1005可以是高速的随机存取存储器(random access memory,ram)存储器,也可以是稳定的存储器(non-volatile memory,nvm),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
65.本领域技术人员可以理解,图2中示出的结构并不构成对切坡口参考线重定位设备的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
66.如图2所示,作为一种计算机存储介质的存储器1005中可以包括操作系统、网络通信模块、用户接口模块以及切坡口参考线重定位程序。
67.在图2所示的切坡口参考线重定位设备中,网络接口1004主要用于连接后台服务器,与所述后台服务器进行数据通信;用户接口1003主要用于连接用户设备;所述切坡口参考线重定位设备通过处理器1001调用存储器1005中存储的切坡口参考线重定位程序,并执行本发明实施例提供的切坡口参考线重定位方法。
68.基于上述硬件结构,提出本发明切坡口参考线重定位方法的实施例。
69.参照图3,图3为本发明切坡口参考线重定位方法第一实施例的流程示意图,提出本发明切坡口参考线重定位方法第一实施例。
70.在第一实施例中,所述切坡口参考线重定位方法包括以下步骤:
71.步骤s10:获取工件的模板参考线,识别所述模板参考线的线条类型。
72.应理解的是,本实施例的执行主体是所述切坡口参考线重定位设备,所述切坡口参考线重定位设备可为个人电脑、工控机、机器人或服务器等电子设备,本实施例对此不加以限制。钢板切坡口工序需要定位坡口线,而坡口线的基准是参考线,这里的参考线是指钢板工件的实际边缘轮廓。一般采用工件在图纸中的形状作为模板,对实际工件进行整体模板匹配定位,经过匹配结果的变换矩阵作用后,模板中的工件边缘轮廓即作为实际的工件边缘轮廓。
73.可理解的是,模板参考线由工件的2d图纸解析而来,所述模板参考线的线条类型包括直线和圆弧。根据模板参考线的所有直线line,重定位实际参考线的所有直线line;根据模板参考线的所有圆弧arc,重定位实际参考线的所有圆弧arc;剪裁所有的相邻参考线;则获得重定位参考线。重定位参考线可适应局部尺寸偏差。
74.步骤s20:按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构。
75.需要说明的是,所述2d图纸的所有直线实体按照预设规则全部转换为直线(line)数据结构,记存储模板参考线的所有line数据结构的集合记为在所述线条类型为直线时,所述目标线型数据结构为直线数据结构,所述预设规则为:对于2d图纸中的直线实体,line数据结构的起点坐标ps=(xs,ys,zs)
t
对应直线实体的基准点坐标(xb,yb),其中xs=xb,ys=yb,zs=0,line数据结构的终点坐标pe=(xe,ye,ze)
t
对应直线实体的终点坐标(x2,y2),其中xe=x2,ys=y2,zs=0。
76.2d图纸的所有圆弧实体按照预设规则全部转换为圆弧(arc)数据结构,并且,所有圆实体按照预设规则也全部转换为arc数据结构。记存储模板参考线的所有arc数据结构的集合记为在所述线条类型为圆弧时,所述目标线型数据结构为圆弧数据结构,所述预设规则为:对于2d图纸中的圆弧实体,arc数据结构的起点坐标ps=(xs,ys,zs)
t
对应圆弧实体的起始角度θs,arc数据结构的终点坐标pe=(xe,ye,ze)
t
对应圆弧实体的终止角度θe,arc的中点坐标pm=(xm,ym,zm)
t
与圆弧实体的顺逆时针状态nc相关,具体计算步骤如下:
77.(a.1)记arc的圆心坐标为pc=(xc,yc,zc)
t
,arc的半径为ra,则
78.xc=xb,yc=yb,zc=0,ra=rb79.其中,(xb,yb)为对应圆弧实体的基准点坐标,rb为对应圆弧实体的半径;
80.(a.2)xs=xc+r
a cosθs,ys=yc+r
a sinθs,zs=zc81.(a.3)xe=xc+r
a cosθe,ye=yc+r
a sinθe,ze=zc82.(a.3)cps=(x
s-xc,y
s-yc,z
s-zc)
t
,cpe=(x
e-xc,y
e-yc,z
e-zc)
t
83.(a.4)α1=atan2(y
s-yc,x
s-xc),α2=atan2(y
e-yc,x
e-xc)
84.(a.5)如果圆弧实体的顺逆时针状态nc为逆时针,且α1>α2,则令
85.α2=α2+2π
86.(a.6)如果圆弧实体的顺逆时针状态nc为顺时针,且α1<α2,则令
87.α1=α1+2π
88.(a.7)δα=α
2-α189.(a.8)其中
[0090][0091]
表示绕z轴旋转θ的旋转矩阵。
[0092]
步骤s30:分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离。
[0093]
可理解的是,遍历集合中所有直线元素计算最优补偿距离di,具体为:(1)预设离散步数nc、步长δd、搜索半径rs,有关系式nc=rs/δd;所述搜索半径和所述步长通常根据经验值进行设置。
[0094]
(2)计算直线的偏移点云与实际工件轮廓的统计距离误差d
ik
(k=-nc,...,nc),偏移量为kδd(k=-nc,...,nc);
[0095]
(3)根据所述统计距离误差d
ik
(k=-nc,...,nc),选取最优补偿距离di。
[0096]
遍历集合中所有圆弧元素计算最优补偿距离dj,具体为:
[0097]
(1)预设离散步数nc、步长δd、搜索半径rs,有关系式nc=rs/δd;
[0098]
(2)计算圆弧的偏移点云与实际工件轮廓的统计距离误差d
jk
(k=-nc,...,nc),偏移量为kδd(k=-nc,...,nc);
[0099]
(3)根据所述统计距离误差d
jk
(k=-nc,...,nc),选取最优补偿距离dj。
[0100]
步骤s40:根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成所述工件的重定位参考线。
[0101]
应理解的是,根据直线的最优补偿距离为di,利用line数据结构的线偏移计算函数,偏移量为di,偏移方向为正,生成重定位后的直线将生成的所有重定位后的直线存入集合中。
[0102]
根据圆弧的最优补偿距离为dj,利用arc数据结构的圆弧偏移计算函数,偏移量为dj,偏移方向为正,生成重定位后的圆弧将生成的所有重定位后的圆弧arc存入集合中。
[0103]
在本实施例中,通过获取工件的模板参考线,识别所述模板参考线的线条类型,按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构,分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离,通过计算最优补偿距离,提高识别尺寸偏差的准确度;根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成工件的重定位参考线,参考线每个直线、圆弧都是单独进行重定位的,可适应局部尺寸偏差。
[0104]
继续参照图3,基于上述第一实施例,提出本发明切坡口参考线重定位方法的第二实施例。
[0105]
在第二实施例中,所述步骤s30,包括:
[0106]
分类遍历各所述线条类型对应的所述目标线型数据结构,计算遍历到的目标线型数据结构的偏移点云与实际工件轮廓的统计距离误差;
[0107]
选取所述统计距离误差的最小值,作为各目标线型数据结构对应的最优补偿距离。
[0108]
需要说明的是,line数据结构的线偏移计算函数,包含2个输入和1个输出,输入1为指定偏移量,输入2为偏移方向,输出为偏移后的line。如图4所示,line的起点和终点具
有相同的坐标系,其x轴方向沿起点指向终点,z轴方向垂直于工件表面向下,x-y-z轴构成右手坐标系。给定偏移量dy后,若偏移方向为正则起点和终点向y轴正方向偏移dy;若偏移方向为负则起点和终点向y轴负方向偏移dy。
[0109]
进一步地,在本实施例中,所述分类遍历各所述线条类型对应的所述目标线型数据结构,计算遍历到的目标线型数据结构的偏移点云与实际工件轮廓的统计距离误差,包括:
[0110]
分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云;
[0111]
对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和;
[0112]
计算所述目标点云中所有点的所述距离之和的距离平均和,将所述距离平均和作为所述当前线型数据结构的偏移点云与实际工件轮廓的统计距离误差。
[0113]
应理解的是,所述目标线型数据结构包括直线数据结构和圆弧数据结构,直线数据结构对应的生成点云方式,包括以下步骤:
[0114]
(1)创建空的点云c;
[0115]
(2)计算线段长度l=||d||,以及方向d=(p
e-ps)/l;pe为线段终点,ps为线段起点;
[0116]
(3)从0开始每间隔l0向点云c中添加点pi,pi=ps+kid,ki=i
·
l0(0≤ki≤l);
[0117]
(4)若l0不能整除l,则将点pe也添加至点云c。
[0118]
直线利用所述线偏移计算函数,生成偏移线偏移量为kδd,偏移方向为正或负;偏移线利用所述直线数据结构对应的点云生成方式,生成对应的点云c
ik
;根据所述点云c
ik
计算直线数据结构的偏移点云与实际工件轮廓的统计距离误差d
ik
(k=-nc,...,nc)。在本实施例中,所述目标线型数据结构包括直线数据结构;所述分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云,包括:记存储模板参考线的所有直线数据结构的集合为遍历所述集合中的所有直线元素根据所述直线元素利用线偏移计算函数,生成偏移线创建空的点云c;计算所述偏移线的线段长度l和线段方向d;从初始值开始每间隔预设长度l0向所述点云c中添加点pi,其中,pi=ps+kid,ki=i
·
l0(0≤ki≤l),ps为所述偏移线的线段起点,i=0、1、2、......、l/l0;若所述预设长度l0不能整除所述线段长度l,则将所述偏移线的线段终点pe添加至所述点云c,生成所述偏移线对应的点云c
ik
。
[0119]
可理解的是,每个圆实体转换为2个圆弧arc数据结构,并存入集合中,具体为:
[0120]
(1)圆实体的圆心记为pc,半径记为r;
[0121]
(2)待生成的第1个圆弧arc1,其起点中点终点的计算公式为:
[0122][0123][0124][0125]
其中,
[0126][0127]
表示绕z轴旋转θ的旋转矩阵,xd=[1,0,0]
t
;
[0128]
(3)待生成的第2个圆弧arc2,其起点中点终点的计算公式为:
[0129][0130][0131][0132]
(4)将arc1和arc2存入集合中。
[0133]
在具体实现中,遍历集合中所有圆弧元素计算最优补偿距离dj,具体为:
[0134]
(1)预设离散步数nc、步长δd、搜索半径rs,有关系式nc=rs/δd;
[0135]
(2)计算圆弧的偏移点云与实际工件轮廓的统计距离误差,偏移量为kδd(k=-nc,...,nc);
[0136]
需要说明的是,arc数据结构的圆弧偏移计算函数,包含2个输入和1个输出,输入1为指定偏移量,输入2为偏移方向,输出为偏移后的arc。如图5所示,给定偏移量dr后,若偏移方向为正则起点和终点向半径增大的方向偏移dr;若偏移方向为负则起点和终点向半径减小的方向偏移dr。
[0137]
应理解的是,圆弧数据结构对应的生成点云方式,包含以下步骤:
[0138]
(1)利用arc的圆心计算函数,计算出其圆心pc,计算公式为:
[0139][0140][0141]
a=[d3ꢀ‑
d4],x=(a
t
a)-1at
b=(x1,x2)
t
,
[0142][0143]
(2)计算离心向量dir1=p
s-pc、dir2=p
m-pc、dir3=p
e-pc;
[0144]
(3)计算圆弧半径r=||dir1||;
[0145]
(4)创建空的点云c,设置分辨率f,那么离散单位角度为θ0=f/r;
[0146]
(5)将离心向量单位化,即dir1→
||dir1||、dir2→
||dir2||、dir3→
||dir3||;
[0147]
(6)计算夹角θ1=acos(dir1·
dir2)、θ2=acos(dir3·
dir2),于是,圆弧的总夹角为δθ=θ1+θ2;
[0148]
(7)计算圆弧的旋转轴
[0149]
(8)从0开始每间隔θ0向点云c中添加点pi,以ps为旋转起点、pc为旋转轴心、nr为旋转轴、kθ0(k=0,1,2,...)为旋转角度,得到点pi;
[0150]
(9)若θ0不能整除δθ,则将pe也添加至点云c中。
[0151]
圆弧利用所述圆弧偏移计算函数,生成偏移圆弧偏移量为kδd,偏移方向为正;偏移圆弧利用圆弧数据结构对应的点云生成方式,生成对应的点云c
jk
。在本实施例中,所述目标线型数据结构包括圆弧数据结构;所述分类遍历各所述线条类型对应的所述目标线型数据结构,根据遍历到的目标线型数据结构,选取对应的生成点云方式,根据所述生成点云方式生成所述当前线型数据结构的目标点云,包括:记存储模板参考线的所有圆弧数据结构的集合为遍历所述集合中所有圆弧元素根据所述圆弧元素利用圆弧偏移计算函数,生成偏移圆弧根据圆弧的圆心计算函数,计算所述偏移圆弧的圆心pc;计算离心向量和圆弧半径;创建空的点云c;设置分辨率,根据所述圆弧半径和所述分辨率计算离散单位角度θ0;计算圆弧的总夹角δθ;根据所述离心向量计算圆弧的旋转轴nr;从初始值开始间隔所述离散单位角度θ0向点云c中添加点pi,以所述圆弧元素的圆弧起点ps为旋转起点、圆心pc为旋转轴心、旋转轴nr、kθ0(k=0,1,2,...)为旋转角度,得到点pi;若θ0不能整除所述总夹角δθ,则将所述偏移圆弧的圆弧终点添加至所述点云c,生成所述偏移圆弧对应的点云c
jk
。如图6所示,图6中(1)为优弧,(2)为劣弧,所述圆弧数据结构对应的生成点云方式,考虑了圆弧的优劣弧特性,其夹角计算结果范围是0-2π,不会因为反三角函数的特性导致夹角范围只能在0-π,从而提高点云生成的准确性,避免生成错误点云。
[0152]
进一步地,在本实施例中,所述对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和,包括:
[0153]
根据工件实际轮廓点云创建kd搜索树;
[0154]
利用kd搜索树在预设搜索半径范围内对所述目标点云中的每个点,搜索每个点在工件实际轮廓点云上的邻近点,并计算每个点到所述邻近点的距离之和。
[0155]
可理解的是,所述目标线型数据结构为直线数据结构时,根据工件实际轮廓点云co创建kd搜索树to,利用kd搜索树to在预设搜索半径rs范围内针对点云c
ik
中的每个点p
ikm
,搜索p
ikm
在点云co上的邻近点{p
ikm1
,p
ikm2
,...p
ikml
},并计算p
ikm
到邻近点的距离之和
[0156][0157]
(2.6)计算点云c
ik
的所有点p
ikm
的所述距离之和d
ikm
的距离平均和,即
[0158][0159]
其中,n表示点云co中在所有点p
ikj
的预设半径rs范围内有邻居点的点个数。d
ik
即为偏移线与实际工件轮廓的统计距离误差。
[0160]dik
(k=-nc,...,nc)中的最小值,即为最优补偿距离di。
[0161]
应理解的是,所述目标线型数据结构为圆弧数据结构时,根据工件实际轮廓点云co创建kd搜索树to,利用kd搜索树to在预设搜索半径rs范围内针对点云c
jk
中的每个点p
jkm
,搜索p
jkm
在点云co上的邻近点{p
jkm1
,p
jkm2
,...p
jkml
},并计算p
jkm
到邻近点的距离之和:
[0162][0163]
计算点云c
jk
的所有点p
jkm
的距离之和d
jkm
的距离平均和,即
[0164][0165]
其中,n表示点云co中在所有点p
jkm
的预设半径rs范围内有邻居点的点个数。d
jk
即为偏移圆弧与实际工件轮廓的统计距离误差。
[0166]djk
(k=-nc,...,nc)中的最小值,即为最优补偿距离dj。
[0167]
进一步地,在本实施例中,所述根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成重定位参考线之后,还包括:
[0168]
计算重定位参考线的相邻两端的交点;
[0169]
根据所述交点对所述重定位参考线进行剪裁,获得最终参考线。
[0170]
在具体实现中,理论上,相邻参考线之间应该首尾相连,但参考线经过重定位后可能出现交叉或应该连接但实际未相交的情况,如图7所示,图7中实线部分为模板参考线,虚线部分依据上述步骤生成的重定位参考线,所述重定位参考线因为是各自偏移生成的,原本相连的参考线各自偏移后,理论上应该继续连接,但是实际却出现交叉,此时需要计算重定位参考线的相邻两段的交点从而对其进行剪裁以获取最终的模板参考线。
[0171]
重定位后的参考线相邻关系,与模板参考线的相邻关系相同,即所有参考线首尾连接,并且最外围闭环的参考线连接顺序为顺时针,内圈闭环的参考线连接顺序为逆时针。根据参考线属性不同,参考线相邻关系存在如下四种组合:line-line、line-arc/arc-line、arc-arc。
[0172]
(a)若相邻参考线关系为line-line,则将两段参考线分别记为linel和line2,通过直线-直线交点计算函数得出两段参考线的交点;具体步骤如下:
[0173]
(1)记line1的起点为p1、终点为p2,line2的起点为p3、终点为p4,根据p1、p2、p3和p4拟合出一个平面s,并将p1、p2、p3和p4投影至平面s,相应的得到p
1s
、p
2s
、p
3s
和p
4s
;然后计算两条直线p
1s
p
2s
、p
3s
p
4s
的方向d1和d2:
[0174][0175]
(1.1)若||d1×
d2||=0,则两直线平行无交点,line1和line2无需做近点替换;
[0176]
(1.2)若||d1×
d2||小于预设值,则两直线接近平行,利用line1的近点计算函数计算离line2的起点p3最近的端点pn1以及距离dist1,利用line1的近点计算函数计算离line2的终点p4最近的端点pn2以及距离dist2;
[0177]
若dist1<dist2,则替换点为否则,替换点为否则,替换点为
[0178]
(1.3)若||d1×
d2||大于预设值,利用直线的参数方程获取交点pr,两直线交点满足:
[0179]
p
1s
+k1d1=p
2s
+k2d2;
[0180]
其中,k1和k2为待求参数。上式可转化为:
[0181][0182]
由于p
1s
、p
2s
、p
3s
和p
4s
共面,且两直线不平行,故该方程一定有唯一解k1和k2。两段坡口线的交点pr=p
1s
+k1d1,替换点p
t
=pr;
[0183]
(2)对line1和line2做近点替换,替换点为交点pt。
[0184]
(b)若相邻参考线中的第1段类型为line,第2段类型为arc,或第1段类型为arc,第2段类型为line,则通过直线-圆弧交点计算函数得出两段参考线的交点;具体步骤如下:
[0185]
(1)计算line方向
[0186]
(2)利用arc的圆心计算函数得到pc,并计算arc的半径ra=||p
c-p3||,其中,p3为arc的起点;
[0187]
(3)计算pc到line的最近点p
nl
=p1+(p
c-p1)
·dl
·
||p
2-p1||,其中,p1为line的起点,p2为line的终点;
[0188]
(4)比较||p
c-p
nl
||与ra大小,
[0189]
(4.1)若|||p
c-p
nl
||-ra|不大于预设值,即arc的圆心到点p
nl
的距离接近于ra,则直线line和圆弧arc可能有1个交点p
nl
,也可能有2个很接近的交点;利用arc的近点计算函数计算离p
nl
最近的端点p
a1
,利用line的近点计算函数计算离p
a1
最近的端点p
l1
,则替换点
[0190]
(4.2)若||p
c-p
nl
||-ra大于预设值,即arc的圆心到点p
nl
的距离大于ra,则判断直线line和圆弧arc无交点,无需做近点替换;
[0191]
(4.3)若||p
c-p
nl
||-ra小于负的预设值,即arc_的圆心到点p
nl
的距离小于ra,则直
线line_和圆弧arc_有2个交点,分别记为p
i1
和p
i2
:
[0192][0193]
记line_针对arc_圆心pc的远点为pf,
[0194]
若||p
f-p
i1
||<||p
f-p
i2
||,则替换点p
t
=p
i1
;
[0195]
若||p
f-p
i1
||≥||p
f-p
i2
||,则替换点p
t
=p
i2
。
[0196]
(5)对line和arc做近点替换,替换点为交点p
t
。
[0197]
(c)若相邻参考线中的第1段类型为arc,第2段类型也为arc,则通过圆弧-圆弧交点计算函数得出两段参考线的交点。具体步骤如下:
[0198]
(1)记第一段圆弧为arc1,第二段圆弧为arc2,利用arc1的圆心计算函数得到p
c1
,利用arc2的圆心计算函数得到p
c2
,
[0199]
(2)计算arc1圆心p
c1
到arc2圆心p
c2
的方向向量
[0200]
若dc小于预设值,则替换点其中,p
51
为arc1的终点、p
32
为arc2的起点,直接跳转至步骤(5);否则,执行步骤(3);
[0201]
(3)计算arc1的半径r
a1
=||p
c-p
31
||、arc2的半径为r
a2
=||p
c-p
52
||,其中,p
31
为arc1的起点、p
52
为arc2的起点;
[0202]
(4)比较||p
c1-p
c2
||与r
a1
+r
a2
的大小:
[0203]
(4.1)若||p
c1-p
c2
||-(r
a1
+r
a2
)大于预设值,则判断两圆弧无交点,arc1和arc2无需做近点替换;
[0204]
(4.2)若||p
c1-p
c2
||-(r
a1
+r
a2
)不大于预设值,则计算
[0205][0206]
若|c
θ1
|>1,则令
[0207][0208]
判断两圆弧有2个交点,分别记为p
j1
和p
j2
:
[0209]
p
j1
=p
c1
+r
a1
·rz
(δθ)
·
dc[0210]
p
j2
=p
c1
+r
a1
·rz
(-δθ)
·
dc[0211]
δθ=acos(c
θ2
)
[0212]
记arc1针对点p
j1
的近点为p
n1
,arc1针对点p
j2
的近点为p
n2
:
[0213]
若||p
j1-p
n1
||>||p
j2-p
n2
||,则替换点p
t
=p
j2
;
[0214]
若||p
j1-p
n1
||≤||p
j2-p
n2
||,则替换点p
t
=p
j1
;
[0215]
(5)对arc1和arc2做近点替换,替换点为交点p
t
,
[0216]
在本实施例中,圆弧生成点云方式,考虑了圆弧的优劣弧特性,其夹角计算结果范围是0-2π,不会因为反三角函数的特性导致夹角范围只能在0-π,从而提高圆弧类型参考线的;相邻参考线的剪裁,保证了所有参考线的首尾连通性。
[0217]
此外,本发明还提出一种存储介质,所述存储介质上存储有切坡口参考线重定位程序,所述切坡口参考线重定位程序被处理器执行时实现如上文所述的切坡口参考线重定位方法的步骤。
[0218]
此外,参照图8,本发明实施例还提出一种切坡口参考线重定位装置,所述切坡口参考线重定位装置包括:
[0219]
获取模块10,用于获取工件的模板参考线,识别所述模板参考线的线条类型;
[0220]
转换模块20,用于按照预设规则将所述模板参考线转换为与各所述线条类型对应的目标线型数据结构;
[0221]
计算模块30,用于分类遍历各所述线条类型对应的所述目标线型数据结构,计算各所述目标线型数据结构对应的最优补偿距离;
[0222]
所述计算模块30,还用于根据各目标线型数据结构对应的所述最优补偿距离,利用所述线条类型对应的偏移计算函数生成所述工件的重定位参考线。
[0223]
本发明所述切坡口参考线重定位装置的其他实施例或具体实现方式可参照上述各方法实施例,此处不再赘述。
[0224]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个......”限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0225]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0226]
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如只读存储器镜像(read only memory image,rom)/随机存取存储器(random access memory,ram)、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,空调器,或者网络设备等)执行本发明各个实施例所述的方法。
[0227]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1