一种自动晶圆隐形切割设备的制作方法
本发明属于激光切割领域,具体涉及一种自动晶圆隐形切割设备。
背景技术:
1、芯片的制造异常复杂,涉及到很多的环节和设备,包括如晶棒切片成晶圆、光刻、测试、晶圆切割、封装等,其中由于晶圆本身就非常薄,且芯片在具有更多功能的同时也变得越来越小,所以怎样在不导致芯片缺陷的情况下在晶圆上切割出尽量多的芯片一直是重要的研究方向,目前的砂轮切割就会存在较明显的划片情况,普通激光切割还会存在加工热熔区、崩边等情况,因此激光隐形切割应运而生,尽管目前现有的隐形切割设备可以对晶圆进行基本切割处理,但却存在着自动化程度低、切割效率低、切割精度不高、切割成品的品质差的缺陷。
技术实现思路
1、鉴于以上,本申请提供一种自动晶圆隐形切割设备,通过结构的优化,不仅集上料、切割、下料为一体,还能极大提高整体加工效率和切割精度,满足自动化生产线的良率和效率需求。具体技术方案如下。
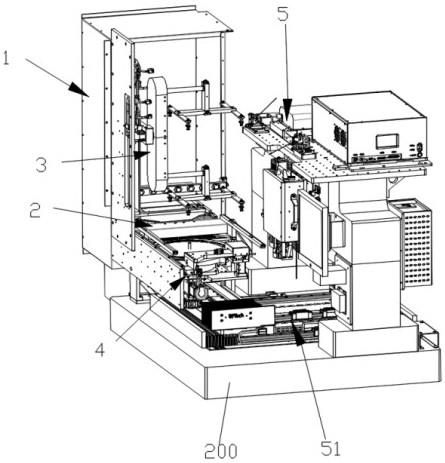
2、一种自动晶圆隐形切割设备,其特征在于:包括机架,机架底部固定大理石基座;设置在机架上的上料架,其上设置料盒升降z轴平台,用于放置料盒;变距轨道模组,通过支撑架固定在大理石基座上,包括两条载物轨道和驱动模组,载物轨道平行的设置在驱动模组上,并可在驱动模组的驱动下进行相对靠近或远离的平移运动,用于放置晶圆物料;上下料旋转吸料模组,包括两组工字型吸料手,轮流吸附运送晶圆物料;夹料搬运模组,包括运料夹爪,通过夹料y轴直线模组设置在机架上,运料夹爪可在夹料y轴直线模组上运动到上料架处,夹送晶圆物料;移动切割模组,包括x轴移动模组、y轴气浮直线平台、马达转台、石英吸附平台和激光聚焦切割模组,x轴移动模组固定在大理石基座上,y轴气浮直线平台垂直的设置在x轴移动模组上,马达转台固定在y轴气浮直线平台上,石英吸附平台设置在马达转台上,激光聚焦切割模组通过大理石基架架设在x轴移动模组上方,x轴移动模组和y轴气浮直线平台可带动石英吸附平台上吸附固定的晶圆物料运动到激光聚焦切割模组下方,从而对晶圆物料进行隐形切割。
3、进一步,激光聚焦切割模组包括激光器、激光调节光路模块和激光聚焦光路模块,激光器和激光调节光路模块固定在大理石基架上,激光聚焦光路模块通过调节z轴设置在大理石基架的侧面,
4、进一步,所述激光调节光路模块的一侧固定有旁轴相机一和旁轴相机二,旁轴相机一为红外相机,旁轴相机二为ccd相机,激光聚焦光路模块中也配置有红外相机。
5、进一步,x轴移动模组包括x轴导轨和x轴直线电机,x轴导轨平行的固定在大理石基座上,y轴气浮直线平台通过底座滑块设置在x轴导轨上,并可有x轴直线电机带动沿x轴导轨进行水平移动。
6、进一步,所述上下料旋转吸料模组通过安装板固定在机架上,且位于变距轨道模组上方,包括吸料升降z轴直线模组、旋转座和连接杆,吸料升降z轴直线模组固定在安装板上,旋转座设置在吸料升降z轴直线模组上并可在其带动下进行升降运动,连接杆对称设置在旋转座的两端,两组工字型吸料手分别连接在连接杆的下方,工字型吸料手的四个端角处安装有吸盘,旋转座的后面安装有旋转电机,可以驱动旋转座转动。
7、进一步,所述夹料y轴直线模组通过安装板设置在位于上下料旋转吸料模组下方的支架上,运料夹爪通过夹料安装座固定到夹料y轴直线模组的滑台上,运料夹爪设置在夹料安装座上,运料夹爪包括上夹板和下夹板,下夹板固定在夹料安装座上,上夹板通过夹料气缸活动的设置在夹料安装座上,夹料气缸可带动上夹板向下夹板压紧,从而实现夹料的动作。
8、进一步,支撑架上设置固定板,固定板上方铺设滑动导轨,载物轨道通过安装座设置在滑动导轨上,安装座的下方设置夹板,夹板贯穿固定板连接到驱动模组上,驱动模组包括变距驱动电机、同步轮和同步带,变距驱动电机固定在支撑架上,变距驱动电机的转轴连接一个同步轮,另一个同步轮连接在固定板的下方,同步带套在两个同步轮上,夹板夹固在同步带上
9、进一步,所述料盒升降z轴平台包括上料z轴直线模组和料盒载台,料盒载台用于承载料盒,料盒载台设置在上料z轴直线模组的滑台上,可在上料z轴直线模组的驱动下进行升降运动。
10、进一步,上料架的出料一侧上设置有静电消除仪。
11、进一步,机架上还设置有显示器、触摸屏和计算机。
12、本实用新型的自动晶圆隐形切割设备,上料架可放置多层料盒,分别用来承装未加工的晶圆物料和加工后的晶圆物料,通过上料z轴直线模组自动调节上下料时料盒的位置,配合运料夹爪将晶圆物料运送至变距轨道模组的载物轨道上,再由上下料旋转吸料模组的工字型吸料手将晶圆物料吸附起,旋转后放置到石英吸附平台上,在y轴气浮直线平台和x轴移动模组的带动下移动至激光聚焦光路模块的下方,激光器发射的激光经激光调节光路模块、激光聚焦光路模块的调节后,聚焦至晶圆内部从而对晶圆进行隐形切割,在这个过程中观察相机实时观察聚焦切割位置,结合旁轴相机一精确定位晶圆内部的切割位置,同时旁轴相机二实时监测切割移动路径,随时由马达转台、y轴气浮直线平台、x轴移动模组进行精准的位置调整,实现切割过程的实时监控和调整,进而提高切割精度和效率。切割完成后的晶圆则由工字型吸料手、运料夹爪夹持推入已调整到位的空料仓内,整个上料、切割、下料过程循环有序进行,无需停机,极大的提高整体加工效率。
13、本实用新型附加的方面和优点将在下面的描述中进一步给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
技术特征:
1.一种自动晶圆隐形切割设备,其特征在于:包括机架,机架底部固定大理石基座(200);
2.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,激光聚焦切割模组(55)包括激光器(551)、激光调节光路模块(552)和激光聚焦光路模块(553),激光器(551)和激光调节光路模块(552)固定在大理石基架(56)上,激光聚焦光路模块(553)通过调节z轴设置在大理石基架(56)的侧面。
3.根据权利要求2所述的自动晶圆隐形切割设备,其特征在于,所述激光调节光路模块(552)的一侧固定有旁轴相机一(554)和旁轴相机二(555),旁轴相机一(554)为红外相机,旁轴相机二(555)为ccd相机;激光聚焦光路模块(553)中还配置有观察相机(556),为红外相机。
4.根据权利要求2所述的自动晶圆隐形切割设备,其特征在于,x轴移动模组(51)包括x轴导轨(511)和x轴直线电机(512),x轴导轨(511)平行的固定在大理石基座(200)上,y轴气浮直线平台(52)通过底座滑块(513)设置在x轴导轨(511)上,并可有x轴直线电机(512)带动沿x轴导轨(511)进行水平移动。
5.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,所述上下料旋转吸料模组(3)通过安装板(400)固定在机架上,且位于变距轨道模组(2)上方,包括吸料升降z轴直线模组(32)、旋转座(33)和连接杆(34),吸料升降z轴直线模组(32)固定在安装板(400)上,旋转座(33)设置在吸料升降z轴直线模组(32)上并可在其带动下进行升降运动,连接杆(34)对称设置在旋转座(33)的两端,两组工字型吸料手(31)分别连接在连接杆(34)的下方,工字型吸料手(31)的四个端角处安装有吸盘(35),旋转座(33)的后面安装有旋转电机(36),可以驱动旋转座(33)转动。
6.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,所述夹料y轴直线模组(42)通过安装板(400)设置在位于上下料旋转吸料模组(3)下方的支架上,运料夹爪(41)通过夹料安装座(43)固定到夹料y轴直线模组(42)的滑台上,运料夹爪(41)设置在夹料安装座(43)上,运料夹爪(41)包括上夹板(411)和下夹板(412),下夹板(412)固定在夹料安装座(43)上,上夹板(411)通过夹料气缸(44)活动的设置在夹料安装座(43)上,夹料气缸(44)可带动上夹板(411)向下夹板(412)压紧,从而实现夹料的动作。
7.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,支撑架(21)上设置固定板(23),固定板(23)上方铺设滑动导轨(24),载物轨道(22)通过安装座(25)设置在滑动导轨(24)上,安装座(25)的下方设置夹板(26),夹板(26)贯穿固定板(23)连接到驱动模组上,驱动模组包括变距驱动电机(27)、同步轮和同步带(28),变距驱动电机固定在支撑架(21)上,变距驱动电机(27)的转轴连接一个同步轮,另一个同步轮连接在固定板(23)的下方,同步带(28)套在两个同步轮上,夹板(26)夹固在同步带(28)上。
8.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,所述料盒升降z轴平台(11)包括上料z轴直线模组(111)和料盒载台(112),料盒载台(112)用于承载料盒(300),料盒载台(112)设置在上料z轴直线模组(111)的滑台上,可在上料z轴直线模组(111)的驱动下进行升降运动。
9.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,上料架(1)的出料一侧上设置有静电消除仪(12)。
10.根据权利要求1所述的自动晶圆隐形切割设备,其特征在于,机架上还设置有显示器、触摸屏和计算机。
技术总结
本技术提供一种自动晶圆隐形切割设备,包括机架、大理石基座;上料架,用于放置料盒;变距轨道模组;上下料旋转吸料模组,轮流吸附运送晶圆物料;夹料搬运模组,夹送晶圆物料;移动切割模组,包括X轴移动模组、Y轴气浮直线平台、马达转台、石英吸附平台、激光器、激光调节光路模块、激光聚焦光路模块、旁轴相机一和旁轴相机二,由激光器发射的激光经激光调节光路模块、激光聚焦光路模块的调节后,聚焦至晶圆内部从而对晶圆进行隐形切割,在这个过程中观察相机实时观察聚焦切割位置,结合旁轴相机一精确定位晶圆内部的切割位置,同时旁轴相机二实时监测切割移动路径。该设备集上料、切割、下料为一体,极大提高整体加工效率和切割精度。
技术研发人员:张晓峰
受保护的技术使用者:苏州首镭激光科技有限公司
技术研发日:20221223
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!