一种智能机械手及宏微智能焊接机器人
本发明涉及机械加工,具体涉及一种智能机械手及宏微智能焊接机器人。
背景技术:
1、焊接也称作熔接、镕接,是一种以加热、高温或者高压的方式连接合金属或其他热塑性材料如塑料的制造工艺及技术。由于目前的焊接机器人价格贵,对于小厂小批量小范围使用来说并不划算,所以目前小厂小批量小范围的焊接方式主要是人工焊接,但其重复焊接效率低且费时长,人工成本较高,长远来看仍然不利于降低成本、提高收益。焊接时涉及到材料圆周方向的焊接、长度方向的焊接以及斜边焊接等,焊接时需要固定两块材料,而人工焊接时固定材料需要小心翼翼,不利于焊接顺利且快速的进行。
技术实现思路
1、基于以上问题,本发明提供一种智能机械手及宏微智能焊接机器人,本发明结构简单,生产成本低,适于小厂使用,且便于快速固定材料,可以对材料进行多个方向的焊接,焊接效率高。
2、为解决以上技术问题,本发明提供了一种智能机械手及宏微智能焊接机器人,包括机械手和底座,所述机械手包括伸缩电机,所述伸缩电机的顶部设有伸缩杆,所述伸缩杆的顶端设有水平设置的支撑杆,所述支撑杆远离伸缩杆的一端的底部设有枪体,所述枪体的底部设有枪头;所述底座的顶面设有沿底座的长度方向设置的活动槽一,所述底座的一侧设有旋转电机一,所述旋转电机一面向底座的一面设有水平设置且伸入活动槽一内的螺纹杆一,所述活动槽一内设有套设于螺纹杆一的外周且与螺纹杆一螺纹旋接的滑块一,所述滑块一的顶部设有与滑块一可拆卸连接且沿螺纹杆一的长度方向设置的螺纹杆二;所述活动槽一与旋转电机一之间的底座内设有竖直设置的齿轮一,所述螺纹杆一穿过齿轮一的中心且与齿轮一焊接,所述齿轮一的顶部穿过底座的顶面,所述齿轮一的顶部设有竖直设置且与齿轮一啮合的齿轮二,所述齿轮二背离旋转电机一的一面的底端设有与螺纹杆二面向齿轮二的一端螺纹旋接的螺纹槽,所述齿轮二面向旋转电机一的一侧设有位于底座的顶面的固定板,所述固定板的顶部设有与固定板可拆卸连接的连接板,所述连接板面向齿轮二的一面设有与齿轮二面向旋转电机一的一面相连的销钉;所述齿轮二背离旋转电机一的一面设有两根既可靠近彼此又能远离彼此的夹板,两根所述夹板位于同一水平面且均沿螺纹杆一的长度方向设置;
3、所述底座的顶面设有沿底座的宽度方向设置的活动槽二,所述活动槽二设置于底座远离旋转电机一的一端,所述底座的一侧设有旋转电机二,所述旋转电机二面向底座的一面设有水平设置且伸入活动槽二内的螺纹杆三,所述螺纹杆三的长度方向与螺纹杆一的长度方向垂直,所述活动槽二内设有套设于螺纹杆三的外周且与螺纹杆三螺纹旋接的滑块三,所述伸缩电机的底部与滑块三的顶部相连,所述支撑杆面向旋转电机一所在侧的一面设有测量块,所述测量块设于枪体所在的一端,所述测量块的底部设有摄像头和距离传感器。
4、进一步的,所述活动槽一的底部穿过底座的底面。
5、进一步的,所述滑块一的顶面设有插槽,所述插槽的底部设有横截面面积大于插槽的横截面面积的底槽,所述插槽与底槽的同一侧穿过滑块一的同侧侧壁;所述底槽内设有可嵌入底槽的底块,所述底块的顶部设有可嵌入插槽内的竖直杆,所述竖直杆的顶部穿过滑块一的顶面,所述螺纹杆二穿过竖直杆的顶部且与竖直杆螺纹旋接。
6、进一步的,所述连接板的底部设有衔接板,所述衔接板位于固定板靠近旋转电机一的一侧,所述衔接板设有穿过衔接板且插入固定板内且与衔接板和固定板均螺纹旋接的螺杆。
7、进一步的,所述夹板靠近齿轮二的一端设有连接块,所述齿轮二面向连接块的一面设有水平设置且与夹板的长度方向垂直的滑槽一,所述连接块远离夹板的一端嵌入滑槽一内且可在滑槽一内滑动,所述连接块设有依次穿过两个连接块且与连接块螺纹旋接的双头螺纹杆,两个所述连接块分别位于双头螺纹杆的两端。
8、进一步的,所述双头螺纹杆的长度方向的两侧分别设有齿轮三和齿轮四,所述齿轮三与齿轮四错开设置,所述齿轮四远离双头螺纹杆的一侧设有与齿轮四啮合的齿轮五,所述齿轮三、齿轮四和齿轮五的两侧均设有插块,所述插块远离相应的齿轮三或齿轮四或齿轮五的一端设有支撑块,所述支撑块远离插块的一端与齿轮二相连;所述双头螺纹杆靠近齿轮三和齿轮四部分的外侧壁均设有与相应的齿轮三和齿轮四啮合的齿条一;所述齿轮三和齿轮五面向齿轮二的一侧均设有滑杆,所述滑杆背离齿轮二的一面设有与相应的齿轮三和齿轮五啮合的齿条二,所述滑杆面向齿轮二的一面设有滑块二,所述齿轮二面向滑杆的一面设有供滑块二滑动的滑槽二,所述滑槽二和滑杆的长度方向与双头螺纹杆的长度方向垂直,所述滑杆远离双头螺纹杆的一端设有沿螺纹杆一的长度方向设置的定位杆,所述定位杆的厚度方向的中轴线与齿轮二竖直方向的直径位于同一竖直面。
9、与现有技术相比,本发明的有益效果是:本发明结构简单,相比于现有设备更加精细的结构而言生产成本低,适于在小厂中推广使用;特别是对于圆管形材料来说,更加容易快速的固定材料,既可以对材料进行长度方向的焊接,又能转动材料进行焊接,与人工焊接相比,焊接效率更高,费时短,可降低工厂前期成本,提高长远收益。
技术特征:
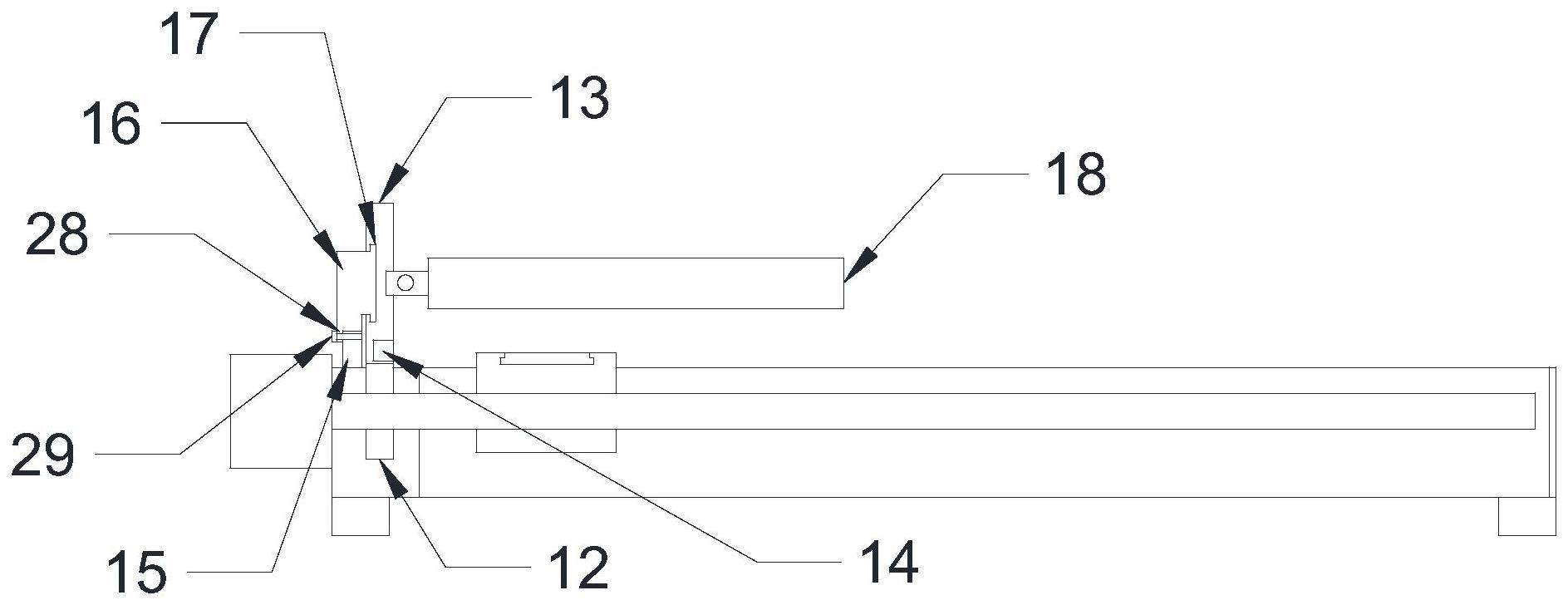
1.一种智能机械手及宏微智能焊接机器人,其特征在于,包括机械手和底座(1),所述机械手包括伸缩电机(2),所述伸缩电机(2)的顶部设有伸缩杆(3),所述伸缩杆(3)的顶端设有水平设置的支撑杆(4),所述支撑杆(4)远离伸缩杆(3)的一端的底部设有枪体(5),所述枪体(5)的底部设有枪头(6);所述底座(1)的顶面设有沿底座(1)的长度方向设置的活动槽一(7),所述底座(1)的一侧设有旋转电机一(8),所述旋转电机一(8)面向底座(1)的一面设有水平设置且伸入活动槽一(7)内的螺纹杆一(9),所述活动槽一(7)内设有套设于螺纹杆一(9)的外周且与螺纹杆一(9)螺纹旋接的滑块一(10),所述滑块一(10)的顶部设有与滑块一(10)可拆卸连接且沿螺纹杆一(9)的长度方向设置的螺纹杆二(11);所述活动槽一(7)与旋转电机一(8)之间的底座(1)内设有竖直设置的齿轮一(12),所述螺纹杆一(9)穿过齿轮一(12)的中心且与齿轮一(12)焊接,所述齿轮一(12)的顶部穿过底座(1)的顶面,所述齿轮一(12)的顶部设有竖直设置且与齿轮一(12)啮合的齿轮二(13),所述齿轮二(13)背离旋转电机一(8)的一面的底端设有与螺纹杆二(11)面向齿轮二(13)的一端螺纹旋接的螺纹槽(14),所述齿轮二(13)面向旋转电机一(8)的一侧设有位于底座(1)的顶面的固定板(15),所述固定板(15)的顶部设有与固定板(15)可拆卸连接的连接板(16),所述连接板(16)面向齿轮二(13)的一面设有与齿轮二(13)面向旋转电机一(8)的一面相连的销钉(17);所述齿轮二(13)背离旋转电机一(8)的一面设有两根既可靠近彼此又能远离彼此的夹板(18),两根所述夹板(18)位于同一水平面且均沿螺纹杆一(9)的长度方向设置;
2.根据权利要求1所述的一种智能机械手及宏微智能焊接机器人,其特征在于,所述活动槽一(7)的底部穿过底座(1)的底面。
3.根据权利要求1所述的一种智能机械手及宏微智能焊接机器人,其特征在于,所述滑块一(10)的顶面设有插槽,所述插槽的底部设有横截面面积大于插槽的横截面面积的底槽,所述插槽与底槽的同一侧穿过滑块一(10)的同侧侧壁;所述底槽内设有可嵌入底槽的底块(26),所述底块(26)的顶部设有可嵌入插槽内的竖直杆(27),所述竖直杆(27)的顶部穿过滑块一(10)的顶面,所述螺纹杆二(11)穿过竖直杆(27)的顶部且与竖直杆(27)螺纹旋接。
4.根据权利要求1所述的一种智能机械手及宏微智能焊接机器人,其特征在于,所述连接板(16)的底部设有衔接板(28),所述衔接板(28)位于固定板(15)靠近旋转电机一(8)的一侧,所述衔接板(28)设有穿过衔接板(28)且插入固定板(15)内且与衔接板(28)和固定板(15)均螺纹旋接的螺杆(29)。
5.根据权利要求1所述的一种智能机械手及宏微智能焊接机器人,其特征在于,所述夹板(18)靠近齿轮二(13)的一端设有连接块(30),所述齿轮二(13)面向连接块(30)的一面设有水平设置且与夹板(18)的长度方向垂直的滑槽一(31),所述连接块(30)远离夹板(18)的一端嵌入滑槽一(31)内且可在滑槽一(31)内滑动,所述连接块(30)设有依次穿过两个连接块(30)且与连接块(30)螺纹旋接的双头螺纹杆(32),两个所述连接块(30)分别位于双头螺纹杆(32)的两端。
6.根据权利要求5所述的一种智能机械手及宏微智能焊接机器人,其特征在于,所述双头螺纹杆(32)的长度方向的两侧分别设有齿轮三(33)和齿轮四(34),所述齿轮三(33)与齿轮四(34)错开设置,所述齿轮四(34)远离双头螺纹杆(32)的一侧设有与齿轮四(34)啮合的齿轮五(35),所述齿轮三(33)、齿轮四(34)和齿轮五(35)的两侧均设有插块(36),所述插块(36)远离相应的齿轮三(33)或齿轮四(34)或齿轮五(35)的一端设有支撑块(37),所述支撑块(37)远离插块(36)的一端与齿轮二(13)相连;所述双头螺纹杆(32)靠近齿轮三(33)和齿轮四(34)部分的外侧壁均设有与相应的齿轮三(33)和齿轮四(34)啮合的齿条一;所述齿轮三(33)和齿轮五(35)面向齿轮二(13)的一侧均设有滑杆(38),所述滑杆(38)背离齿轮二(13)的一面设有与相应的齿轮三(33)和齿轮五(35)啮合的齿条二,所述滑杆(38)面向齿轮二(13)的一面设有滑块二(39),所述齿轮二(13)面向滑杆(38)的一面设有供滑块二(39)滑动的滑槽二(40),所述滑槽二(40)和滑杆(38)的长度方向与双头螺纹杆(32)的长度方向垂直,所述滑杆(38)远离双头螺纹杆(32)的一端设有沿螺纹杆一(9)的长度方向设置的定位杆(41),所述定位杆(41)的厚度方向的中轴线与齿轮二(13)竖直方向的直径位于同一竖直面。
技术总结
本发明涉及机械加工技术领域,公开了一种智能机械手及宏微智能焊接机器人,包括机械手、底座、活动槽一、旋转电机一、螺纹杆一、滑块一、螺纹杆二、齿轮一、齿轮二、螺纹槽、固定板、连接板、销钉、夹板、活动槽二、旋转电机二、螺纹杆三、滑块三、测量块、摄像头和距离传感器。本发明结构简单,相比于现有设备更加精细的结构而言生产成本低,适于在小厂中推广使用;特别是对于圆管形材料来说,更加容易快速的固定材料,既可以对材料进行长度方向的焊接,又能转动材料进行焊接,与人工焊接相比,焊接效率更高,费时短,可降低工厂前期成本,提高长远收益。
技术研发人员:叶建雄,朱品昌,茆雨琛,汪吕戈,储李杰
受保护的技术使用者:浙江机电职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!