一种具有防卡死功能的SLM型3D打印机铺粉设备的制作方法
一种具有防卡死功能的slm型3d打印机铺粉设备
技术领域
1.本发明涉及3d打印技术领域,具体是涉及一种具有防卡死功能的slm型3d打印机铺粉设备。
背景技术:
2.3d打印(3dp)即快速成型技术的一种,又称增材制造,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。现在的3d打印技术大体可分为sls(选择性激光烧结)、slm(选择性激光融化)、fdm(熔融沉积成型)、sla(立体光固化成型)和ebm(电子束喷射成型)。其中,slm型在打印时需要将金属粉末实现铺平,随后层层烧结,从而到达3d打印的效果,但是在对金属粉末进行烧结时常会产生黑烟,黑烟中存有大量的固定颗粒,当黑烟产生后便会有部分落在输送装置上,长时间的堆积会使得输送装置在输送装置带动推板推动时出现卡顿以及铺粉不均的现象。
3.中国专利cn202120347440.x公开了一种用于slm型金属3d打印机的铺粉装置,安装在成型室底板上;包括铺粉刷、用于驱动铺粉刷在送粉缸、成型缸和漏粉槽之间移动的动力组件、以及用于将铺粉刷的铺粉工位与动力组件隔离的隔离组件;所述动力组件安装在成型室底板上;所述隔离组件设置在成型室底板上并位于铺粉工位与动力组件之间,其中,送粉缸、成型缸和漏粉槽设置在铺粉工位上;所述铺粉刷一端与动力组件连接,另一端穿过隔离组件伸至铺粉工位,实现动力组件驱动铺粉刷在送粉缸、成型缸和漏粉槽之间移动进行铺粉工作。
4.上述方案虽然一定程度上解决了黑烟积累聚集造成铺粉装置卡死的问题,但是其防卡死的效果仍然欠佳,且不能保证铺粉装置的均匀性。
技术实现要素:
5.基于此,有必要针对现有技术问题,提供一种具有防卡死功能的slm型3d打印机铺粉设备,包括底座、打印装置、清理装置、移动壳和输送装置;清理装置设置在移动壳上,清理装置包括第一直线驱动器、第一旋转驱动器、转轴、清扫件、放置板、吸尘管、自动跟进组件和滑槽;第一直线驱动器固定设置在移动壳的上部,第一直线驱动器的输出端竖直向下;放置板固定设置在第一直线驱动器的输出端上;滑槽沿移动壳的高度方向开设在移动壳的侧壁上;第一旋转驱动器固定设置在放置板上,第一旋转驱动器的输出端指向滑槽;转轴固定设置在第一旋转驱动器的输出端上,转轴与滑槽滑动配合;清扫件沿转轴的轴线固定设置在转轴远离第一旋转驱动器的一侧上;吸尘管设置在清扫件的上方;自动跟进组件的两端分别与吸尘管和转轴连接。
6.优选的,自动跟进组件包括第一波纹管和连接杆;第一波纹管设置在吸尘管靠近清扫件的一端上;连接杆的两端分别与第一波纹管和转轴连接。
7.优选的,清理装置包括第一引导组件,第一引导组件包括第一引导杆和第一引导孔;第一引导孔设置有多个,第一引导孔沿移动壳的高度方向贯穿的开设在放置板的上部;
第一引导杆沿第一引导孔的轴线固定设置在移动壳的底部,第一引导杆和第一引导孔滑动配合。
8.优选的,还包括自适应装置,自适应装置包括监测组件、第一放置架、驱动装置、第一滚轮、第二直线驱动器和第一测距传感器;监测组件设置在移动壳内的第一旋转驱动器一侧,监测组件用于监测输送装置上部的平整性;第二直线驱动器设置在监测组件远离第一旋转驱动器的一侧,第二直线驱动器的输出端上竖直向下;第一测距传感器设置在第二直线驱动器的一侧,第一测距传感器的输出端竖直向下,第一测距传感器和第二直线驱动器电连接;第一放置架固定设置在第二直线驱动器的输出端上;第一滚轮可转动的设置在第一放置架上;驱动装置设置在第一放置架上,驱动装置用于驱动第一滚轮旋转。
9.优选的,监测组件包括第二放置架、第二滚轮、密封壳和第二测距传感器;密封壳固定设置在放置板远离第一旋转驱动器一侧的移动壳内壁上;第二放置架可滑动的设置在密封壳的内部;第二滚轮可转动的设置在第二放置架上;第二测距传感器固定设置在密封壳内侧的顶部,第二测距传感器的输出端竖直向下。
10.优选的,监测组件包括第一连通管和第一刷子;第一刷子固定设置在第二放置架上,第一刷子的下部与第二滚轮的轮周壁相接;密封壳的侧壁上开始有出气口,第一连通管的两端分别与出气口和吸尘管连接,第一连通管与吸尘管相通。
11.优选的,驱动装置包括第二旋转驱动器、第一同步轮、第二同步轮和同步带;第二旋转驱动器固定设置在第一滚轮上方的第一放置架上,第二旋转驱动器的输出轴的轴线与第一同步轮的轴线平行;第一同步轮固定设置在第二旋转驱动器的输出端上;第二同步轮沿第一滚轮的轴线设置在第一滚轮靠近第一同步轮的一侧;同步带的两端分别与第一同步轮和第二同步轮啮合。
12.优选的,自适应装置还包括除尘组件,除尘组件包括连接件、第二刷子和第二连接管;连接件固定设置在放置板上;第二刷子设置在连接件的底部;第二连接管设置在连接件的一侧,第二连接管上部与吸尘管相通。
13.优选的,自适应装置还包括稳定组件,稳定组件包括导轨;导轨设置有两个,导轨沿移动壳的高度方向固定设置在连接件两侧的移动壳内壁上,连接件与导轨滑动配合。
14.优选的,还包括防尘板;防尘板固定设置在移动壳的外围。
15.本技术相比较于现有技术的有益效果是:1.本技术通过设置第一直线驱动器、第一旋转驱动器、转轴、清扫件、放置板、吸尘管、自动跟进组件和滑槽,实现了铺粉装置的自清洁功能。
16.2.本技术通过设置第一波纹管和连接杆,提升了吸尘管的吸尘效果。
17.3.本技术通过设置第一引导杆和第一引导孔,实现了放置板可以更稳定的被第一直线驱动器带动移动的技术要求。
18.4.本技术通过设置监测组件、第一放置架、驱动装置、第一滚轮、第二直线驱动器和第一测距传感器,实现了移动壳可以在输送装置上已经存有固体颗粒时依旧可以平稳的移动,从而保证了在进行铺粉时金属粉的平整性的技术要求。
19.5.本技术通过设置第二放置架、第二滚轮、密封壳和第二测距传感器,实现了监测组件的监测功能。
附图说明
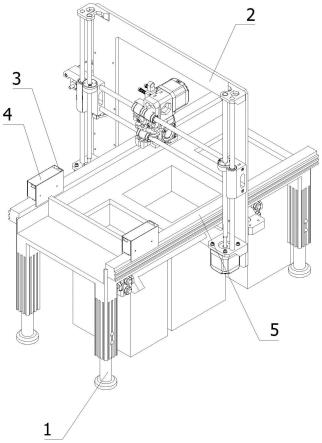
20.图1是本技术的立体示意图一;图2是本技术的立体示意图二;图3是本技术的设置有清理装置和自适应装置的移动壳立体示意图;图4是本技术的设置有去除了部分防尘板后的清理装置和自适应装置的移动壳立体示意图;图5是本技术的设置有去除了防尘板后的清理装置和自适应装置的移动壳立体示意图图6是本技术的清理装置和自适应装置组装立体示意图;图7是本技术的去除了吸尘管后的清理装置和自适应装置组装立体示意图;图8是本技术的去除了吸尘管和第一波纹管后的清理装置和自适应装置的组装立体示意图;图9是本技术的局部立体示意图;图10是本技术的局部自适应装置立体示意图一;图11是本技术的局部自适应装置立体示意图二;图12是本技术的局部监测组件立体示意图一;图13是本技术的局部监测组件立体示意图二;图14是本技术的设置有自适应装置的移动壳立体示意图。
21.图中标号为:1-底座;2-打印装置;3-清理装置;3a-第一直线驱动器;3b-第一旋转驱动器;3c-转轴;3d-清扫件;3e-放置板;3f-吸尘管;3g-自动跟进组件;3g1-第一波纹管;3g2-连接杆;3h-滑槽;3i-第一引导组件;3i1-第一引导杆;3i2-第一引导孔;3j-防尘板;4-移动壳;5-输送装置;6-自适应装置;6a-监测组件;6a1-第二放置架;6a2-第二滚轮;6a3-密封壳;6a4-第二测距传感器;6a5-第一连通管;6a6-第一刷子;6b-第一放置架;6c-驱动装置;6c1-第二旋转驱动器;6c2-第一同步轮;6c3-第二同步轮;6c4-同步带;6d-第一滚轮;6e-第二直线驱动器;6f-第一测距传感器;6g-除尘组件;6g1-连接件;6g2-第二刷子;6g3-第二连接管;6h-稳定组件;6h1-导轨。
具体实施方式
22.为能进一步了解本发明的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本发明作进一步详细描述。
23.如图1-14所示,本技术提供:一种具有防卡死功能的slm型3d打印机铺粉设备,包括底座1、打印装置2、清理装置3、移动壳4和输送装置5;清理装置3设置在移动壳4上,清理装置3包括第一直线驱动器3a、第一旋转驱动器3b、转轴3c、清扫件3d、放置板3e、吸尘管3f、自动跟进组件3g和滑槽3h;
第一直线驱动器3a固定设置在移动壳4的上部,第一直线驱动器3a的输出端竖直向下;放置板3e固定设置在第一直线驱动器3a的输出端上;滑槽3h沿移动壳4的高度方向开设在移动壳4的侧壁上;第一旋转驱动器3b固定设置在放置板3e上,第一旋转驱动器3b的输出端指向滑槽3h;转轴3c固定设置在第一旋转驱动器3b的输出端上,转轴3c与滑槽3h滑动配合;清扫件3d沿转轴3c的轴线固定设置在转轴3c远离第一旋转驱动器3b的一侧上;吸尘管3f设置在清扫件3d的上方;自动跟进组件3g的两端分别与吸尘管3f和转轴3c连接。
24.基于上述实施例,本技术想要解决的技术问题是如何实现铺粉装置的自清洁功能,从而减少卡死的情况出现。为此,本技术打印装置2设置在底座1上,打印装置2可以对放置在底座1上的金属粉末进行打印。输送装置5沿底座1的长度方向固定设置在底座1的上部,移动壳4沿输送装置5的长度方向可滑动的设置在输送装置5的上部,当移动壳4被输送装置5带动时,此时设置在移动壳4中的清理装置3也会同步发生移动。第一直线驱动器3a优选为伺服电机,第一旋转驱动器3b优选为伺服电机。清理装置3的工作原理如下,在铺粉设备才开始使用时,此时第一直线驱动器3a和第一旋转驱动器3b都是处于断电的状态的,这是由于打印装置2在对金属粉末进行烧结时所产生的黑烟有限,不会立刻产生大量的颗粒。所以在才开始使用铺粉设备时,无需将第一直线驱动器3a和第一旋转驱动器3b激活,这样便可减少不必要的能源消耗,降低生产的成本。在使用一段时间后,此时在输送装置5上堆积了足够多的颗粒,若不及时将这些固体颗粒清除掉,就会出现移动壳4在移动时出现卡死的现象,为了避免上述情况的出现,便可对第一直线驱动器3a和第一旋转驱动器3b的启动时间进行设置,即每隔一段时间第一直线驱动器3a和第一旋转驱动器3b便会启动一次,当第一直线驱动器3a和第一旋转驱动器3b启动后,此时第一直线驱动器3a会带动设置在其输出端上的放置板3e缓缓下降,此时设置在放置板3e上的第一旋转驱动器3b也会随着放置板3e一同缓缓下降,由于第一旋转驱动器3b和第一直线驱动器3a是同步启动的,所以在第一直线驱动器3a启动时,第一旋转驱动器3b也会启动,第一旋转驱动器3b带动设置其输出端上的转轴3c旋转,转轴3c在被第一旋转驱动器3b带动旋转的同时,还会在第一直线驱动器3a的作用下沿着滑槽3h的长度方向滑动。此时设置在转轴3c上的清扫件3d也会随着转轴3c一同移动,又因为转轴3c处于旋转的状态,所以清扫件3d在转轴3c的带动下也会随之发生旋转。吸尘管3f远离清扫件3d的一端设置有吸尘器,由于吸尘管3f靠近清扫件3d的一侧设置有自动跟进组件3g,自动跟进组件3g会在转轴3c沿着滑槽3h发生滑动时将吸尘管3f延长。如此便可使得吸尘管3f靠近清扫件3d的一端与清扫件3d之间的距离不会变。这样在清扫件3d对输送装置5进行清扫时,吸尘器便会开始启动,吸尘器会通过吸尘管3f将清扫件3d清扫下来的固体颗粒吸走。若不设置自动跟进组件3g,当转轴3c在滑槽3h中发生滑动时,此时清扫件3d与吸尘管3f之间的距离会之间增大,这样会使得在清扫件3d将固体颗粒清扫下来时,吸尘管3f无法很好的将固体颗粒吸走,如此便实现了铺粉装置的自清洁功能。
25.进一步的,如图7-8所示:自动跟进组件3g包括第一波纹管3g1和连接杆3g2;第一波纹管3g1设置在吸尘管3f靠近清扫件3d的一端上;连接杆3g2的两端分别与第一波纹管3g1和转轴3c连接。
26.基于上述实施例,本技术想要解决的技术问题是自动跟进组件3g是如何提升吸尘管3f的吸尘效果的。为此,本技术连接杆3g2的侧壁上开设有贯穿孔,转轴3c的轴线与贯穿孔的轴线共线,转轴3c与贯穿孔间隙配合,当转轴3c在第一旋转驱动器3b的带动下发生旋
转时,此时设置在转轴3c上的连接杆3g2不会被转轴3c所影响。当第一直线驱动器3a带动设置在其输出端上放置板3e移动时,此时设置在第一旋转驱动器3b输出端上的转轴3c便会随之发生移动,此时转轴3c便会沿着滑槽3h的长度方向移动,而在转轴3c和第一波纹管3g1之间设置有连接杆3g2,且第一波纹管3g1本身就具有伸缩功能,所以在转轴3c发生滑动时,此时设置在转轴3c上的连接杆3g2会带动第一波纹管3g1伸长。通过第一波纹管3g1的伸长便使得吸尘管3f与清扫件3d之间的距离始终不变,这样在清扫件3d对输送装置5进行清扫的时候,被清扫件3d清扫下来的固体粉末便会通过第一波纹管3g1进入到吸尘管3f中。而在结束清理工作时,第一直线驱动器3a的输出端缩回,设置在转轴3c上的连接杆3g2也会带动第一波纹管3g1缩回。如此便提升了吸尘管3f的吸尘效果。
27.进一步的,如图6-9所示:清理装置3包括第一引导组件3i,第一引导组件3i包括第一引导杆3i1和第一引导孔3i2;第一引导孔3i2设置有多个,第一引导孔3i2沿移动壳4的高度方向贯穿的开设在放置板3e的上部;第一引导杆3i1沿第一引导孔3i2的轴线固定设置在移动壳4的底部,第一引导杆3i1和第一引导孔3i2滑动配合。
28.基于上述实施例,本技术想要解决的技术问题是如何使得第一直线驱动器3a在带动放置移动时,放置板3e可以更稳定的移动。为此,本技术当第一直线驱动器3a启动后,此时设置在第一直线驱动器3a输出端上的放置板3e便会随之发生移动,此时设置在放置板3e上的第一引导孔3i2和第一引导杆3i1便会发生滑动,由于第一引导孔3i2和第一引导杆3i1的限制,在放置板3e发生滑动的时候,此时放置板3e便会稳定的沿着第一直线驱动器3a输出轴的轴线方向移动,且在长时间的使用后,第一直线驱动器3a的输出轴也不会出现偏转的现象。如此便实现了放置板3e可以更稳定的被第一直线驱动器3a带动移动的技术要求。
29.进一步的,如图8-11所示:还包括自适应装置6,自适应装置6包括监测组件6a、第一放置架6b、驱动装置6c、第一滚轮6d、第二直线驱动器6e和第一测距传感器6f;监测组件6a设置在移动壳4内的第一旋转驱动器3b一侧,监测组件6a用于监测输送装置5上部的平整性;第二直线驱动器6e设置在监测组件6a远离第一旋转驱动器3b的一侧,第二直线驱动器6e的输出端上竖直向下;第一测距传感器6f设置在第二直线驱动器6e的一侧,第一测距传感器6f的输出端竖直向下,第一测距传感器6f和第二直线驱动器6e电连接;第一放置架6b固定设置在第二直线驱动器6e的输出端上;第一滚轮6d可转动的设置在第一放置架6b上;驱动装置6c设置在第一放置架6b上,驱动装置6c用于驱动第一滚轮6d旋转。
30.基于上述实施例,本技术想要解决的技术问题是由于清理装置3隔段时间才会进行一次清理,如何使得移动壳4在输送装置5上已经存有了固体颗粒时,依旧可以稳定移动。为此,本技术第二直线驱动器6e优选为伺服电缸,监测组件6a可以监测出输送装置5上部表面的凹凸不平,即当输送装置5的上部存有粘粘在一起的固体颗粒时,此时粘粘在一起的固体颗粒的顶部便会高于输送装置5的上部表面,当监测组件6a经过粘粘在一起的固体颗粒位置时,此时便会将其顶部到输送装置5上部表面的距离读取出来,此处将监测组件6a读取到的数值称为对比值,随后将数值分别传递给第一测距传感器6f和第二直线驱动器6e。驱动装置6c会驱动第一滚轮6d在输送装置5上滚动,此时移动壳4便可在输送装置5上滑动,当经过粘粘在一起的固体颗粒即将被第一滚轮6d碾过时,此时第二直线驱动器6e和第一测距
传感器6f便会被同步激活,此时第二直线驱动器6e会带动第一放置架6b缩回,第一放置架6b的缩回量会通过第一测距传感器6f测量,当第一放置架6b的缩回量与对比值相同时,此时第二直线驱动器6e便会停止运行,如此便实现了移动壳4可以在输送装置5上已经存有固体颗粒时依旧可以平稳的移动,从而保证了在进行铺粉时金属粉的平整性的技术要求。
31.进一步的,如图12-13所示:监测组件6a包括第二放置架6a1、第二滚轮6a2、密封壳6a3和第二测距传感器6a4;密封壳6a3固定设置在放置板3e远离第一旋转驱动器3b一侧的移动壳4内壁上;第二放置架6a1可滑动的设置在密封壳6a3的内部;第二滚轮6a2可转动的设置在第二放置架6a1上;第二测距传感器6a4固定设置在密封壳6a3内侧的顶部,第二测距传感器6a4的输出端竖直向下。
32.基于上述实施例,本技术想要解决的技术问题是监测组件6a是如何实现监测功能的。为此,本技术移动壳4在输送装置5上移动时,当输送装置5上存有异物时,此时第二滚轮6a2便会从异物的上部碾过,此时异物会将第二滚轮6a2顶起,由于第二滚轮6a2设置在第二放置架6a1上,而第二放置架6a1沿密封壳6a3的高度方向可滑动的设置在密封壳6a3中,所以在第二滚轮6a2被异物顶起后,此时第二滚轮6a2便会带动第二放置架6a1随之一同被顶起,这样就会使得第二放置架6a1在密封壳6a3中发生滑动。如此便实现了监测组件6a的监测功能。
33.进一步的,如图12-13所示:监测组件6a包括第一连通管6a5和第一刷子6a6;第一刷子6a6固定设置在第二放置架6a1上,第一刷子6a6的下部与第二滚轮6a2的轮周壁相接;密封壳6a3的侧壁上开始有出气口,第一连通管6a5的两端分别与出气口和吸尘管3f连接,第一连通管6a5与吸尘管3f相通。
34.基于上述实施例,本技术想要解决的技术问题是如何对第二滚轮6a2进行实时清理,从而保证监测组件6a的数据准确性。为此,本技术第一刷子6a6始终与第二滚轮6a2相接,所以在第二滚轮6a2发生转动时,第一刷子6a6会不断的与第二滚轮6a2的轮周表面发生接触,这样即使第二滚轮6a2上粘有少量的固体颗粒,也可以被第一刷子6a6清理掉,清理掉的固体颗粒便会被第一连通管6a5吸走,此时如此便可使得第二滚轮6a2的轮周表面始终处于洁净的状态,如此便实现了对第二滚轮6a2的实时清理,从而保证了监测组件6a的数据准确性。
35.进一步的,如图10所示:驱动装置6c包括第二旋转驱动器6c1、第一同步轮6c2、第二同步轮6c3和同步带6c4;第二旋转驱动器6c1固定设置在第一滚轮6d上方的第一放置架6b上,第二旋转驱动器6c1的输出轴的轴线与第一同步轮6c2的轴线平行;第一同步轮6c2固定设置在第二旋转驱动器6c1的输出端上;第二同步轮6c3沿第一滚轮6d的轴线设置在第一滚轮6d靠近第一同步轮6c2的一侧;同步带6c4的两端分别与第一同步轮6c2和第二同步轮6c3啮合。
36.基于上述实施例,本技术想要解决的技术问题是由于移动壳4的内部空间有限,如何使得驱动装置6c驱动第一滚轮6d旋转。为此,本技术第二旋转驱动器6c1优选为伺服电机,当第二旋转驱动器6c1开始启动后,此时设置在第二旋转驱动器6c1输出端上的第一同步轮6c2便会开始发生旋转,此时与第一同步轮6c2啮合的同步带6c4便会随之一同转动,由
于同步带6c4又和第二同步轮6c3相互啮合,所以在同步带6c4发生转动时,此时同步带6c4便会带动第二同步轮6c3旋转,由于第二同步轮6c3与第一滚轮6d固定连接,所以在第一滚轮6d便会被带动旋转,如此便实现了驱动装置6c可以在较为狭小的空间内实现的驱动功能的技术要求。
37.进一步的,如图9-11所示:自适应装置6还包括除尘组件6g,除尘组件6g包括连接件6g1、第二刷子6g2和第二连接管6g3;连接件6g1固定设置在放置板3e上;第二刷子6g2设置在连接件6g1的底部;第二连接管6g3设置在连接件6g1的一侧,第二连接管6g3上部与吸尘管3f相通。
38.基于上述实施例,本技术想要解决的技术问题是如何对第一滚轮6d上粘有的固体颗粒进行清除。为此,本技术当第一直线驱动器3a启动后,此时设置在第一直线驱动器3a输出端上的放置板3e便会缓缓下降,由于连接件6g1是固定设置在放置板3e上的,所以在放置板3e下降时,此时设置在放置板3e上的连接件6g1也会随之发生移动,此时连接件6g1便会带动第二刷子6g2向下移动,当第一直线驱动器3a处于缩回的状态时,此时第二刷子6g2不与第一滚轮6d接触,当第一直线驱动器3a处于伸出的状态时,此时第二刷子6g2便会与第一滚轮6d接触,此时第一滚轮6d在发生滚动时,第一滚轮6d便会与第二刷子6g2发生摩擦,进而使得粘在第一滚轮6d上的固体颗粒被扫下来,扫下来的固体颗粒会被设置在连接件6g1一侧的第二连接管6g3吸走。如此便实现了对于第一滚轮6d上固体颗粒的清洁功能。
39.进一步的,如图6-7所示:自适应装置6还包括稳定组件6h,稳定组件6h包括导轨6h1;导轨6h1设置有两个,导轨6h1沿移动壳4的高度方向固定设置在连接件6g1两侧的移动壳4内壁上,连接件6g1与导轨6h1滑动配合。
40.基于上述实施例,本技术想要解决的技术问题是如何是连接件6g1可以更稳定的带动第二刷子6g2移动。为此,本技术由于连接件6g1与导轨6h1滑动配合。所以在连接件6g1发生滑动时,连接件6g1便会在导轨6h1的限制下沿着移动壳4的高度方向滑动。
41.进一步的,如图3所示:还包括防尘板3j;防尘板3j固定设置在移动壳4的外围。
42.基于上述实施例,本技术想要解决的技术问题是如何防止清理装置3在进行清理时,固体颗粒飞出的情况出现。为此,本技术通过设置防尘板3j,便可防止固体颗粒在被清扫件3d清扫后飞出的情况发生。
43.以上实施例仅表达了本发明的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1