一种气相外延生长辅助装置的制作方法
1.本技术属于半导体技术领域,具体涉及一种气相外延生长辅助装置。
背景技术:
2.在半导体行业,气相外延生长半导体晶圆的使用数量急剧增加,产品的良品率一直是重中之重。现有外延生长工艺过程中,取放晶圆、清理片坑等步骤多由人工使用不同工具分别进行,工具较多且操作过程较为繁琐,并且,人工操作精度难以保证,且容易误操作,从而容易影响产品良率。
技术实现要素:
3.本技术旨在至少解决现有技术中存在的技术问题之一,提供一种气相外延生长辅助装置。
4.本技术实施例提供一种气相外延生长辅助装置,包括:装置本体,可移动的设于石墨盘上方,所述石墨盘位于气相外延生长设备内,并且,所述石墨盘表面的中心区域设有片坑,所述片坑用于放置待生长的半导体晶圆;行走机构,连接于所述装置本体,并用于移动所述装置本体;升降机构,所述行走机构通过所述升降机构连接所述装置本体,并且,所述升降机构能够升降所述装置本体;抓取机构,设于所述装置本体上,用于抓取所述半导体晶圆;研磨机构,设于所述装置本体上,用于对所述片坑表面沉积的外延材料进行研磨,所述片坑位于气相外延生长设备内,并用于放置所述半导体晶圆;除尘机构,设于所述装置本体上,用于除去研磨产生的粉尘;控制器,分别连接所述行走机构、所述升降机构、所述抓取机构、所述研磨机构和所述除尘机构,以进行系统控制。
5.在一些可选实施例中,所述抓取机构包括夹爪和驱动组件;所述夹爪设于所述装置本体上,并具有抓取所述半导体晶圆的第一形态和放下所述半导体晶圆的第二形态;所述驱动组件设于所述装置本体上并连接所述夹爪,用于驱使所述夹爪切换为所述第一形态或者所述第二形态。
6.在一些可选实施例中,所述夹爪包括多个连杆机构,所述连杆机构包括l型连杆和直连杆;所述直连杆的两端分别与所述装置本体和所述l型连杆的折弯处铰接;所述l型连杆的第一端与所述驱动组件铰接,并能够相对所述装置本体沿直线方向移动,以使所述夹爪在所述第一形态和所述第二形态之间变化。
7.在一些可选实施例中,所述驱动组件包括传动杆和安装座;所述传动杆沿所述直线方向设于所述装置本体上,并能够相对所述装置本体周向旋转;所述安装座套接于所述传动杆上,并能够在所述传动杆周向旋转过程中沿所述传动杆的轴向移动;所述l型连杆的第一端与所述安装座铰接。
8.在一些可选实施例中,所述驱动组件包括传动杆;所述传动杆沿所述直线方向设于所述装置本体上,并能够沿所述直线方向移动;所述l型连杆的第一端与所述传动杆铰接。
9.在一些可选实施例中,所述装置本体上设有转盘,所述装置本体通过所述转盘连接所述研磨机构及所述除尘机构,并能够通过所述转盘旋转所述研磨机构及所述除尘机构,以使所述研磨机构及所述除尘机构沿所述片坑的周向移动。
10.在一些可选实施例中,所述研磨机构及所述除尘机构能够沿所述转盘的径向移动。
11.在一些可选实施例中,所述装置本体上设有防护罩,所述防护罩具有缩回所述装置本体的第一状态以及笼罩所述石墨盘的第二状态;当对所述片坑进行研磨时,所述防护罩切换为所述第二状态以防止粉尘四散。
12.在一些可选实施例中,所述装置本体上设有第一检测单元,用于检测所述装置本体相对所述石墨盘的位置。
13.在一些可选实施例中,所述装置本体上设有第二检测单元,用于检测所述装置本体相对所述片坑表面或者所述石墨盘表面的距离。
14.本技术的上述技术方案具有如下有益的技术效果:本技术实施例的辅助装置可以用于气相外延生长设备,其能够在气相外延生长工艺过程中实现取放晶圆、研磨石墨盘和除尘等机械自动一体化操作,相对于传统工艺中由人工操作的方式,该辅助装置能够解放人工,同时避免人工操作引起的误差和误操作,从而保证产品良率。并且,该辅助装置集成了多项功能设计,使得气相外延生长设备不再需要配置各种专用工具,且在外延生长工艺过程中,可以减少人工操作时更换不同工具所需的时间,从而缩短工艺周期。
附图说明
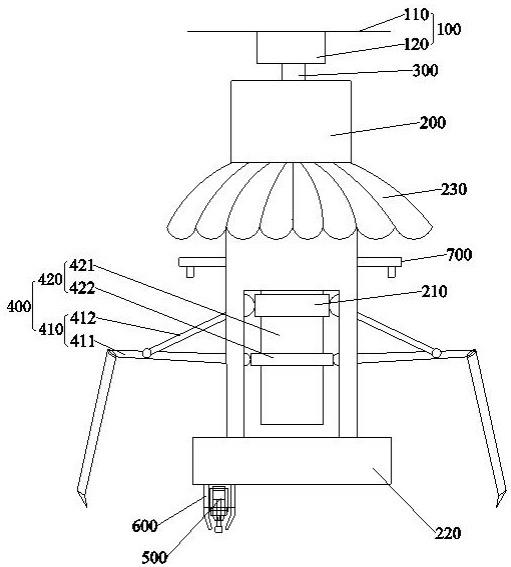
15.图1是本技术示例性实施例中一种气相外延生长辅助装置的结构示意图;图2是本技术示例性实施例中一种气相外延生长辅助装置的取片动作示意图;图3是本技术示例性实施例中一种气相外延生长辅助装置的研磨状态示意图;图4是本技术示例性实施例中一种气相外延生长辅助装置的防护状态示意图;图5是本技术示例性实施例中研磨机构及除尘机构的结构示意图;图中,100、行走机构;110、轨道;120、小车;200、装置本体;210、环形座;220、转盘;230、防护罩;300、升降机构;400、抓取机构;410、夹爪;411、l型连杆;412、直连杆;420、驱动组件;421、传动杆;422、安装座;500、研磨机构;510、气动马达;520、夹头;530、磨头;600、除尘机构;610、吸尘器;620、吸气管道;700、第一检测单元;800、石墨盘;810、片坑。
具体实施方式
16.下面结合附图和实施例对本技术的实施方式作进一步详细描述。以下实施例的详细描述和附图用于示例性地说明本技术的原理,但不能用来限制本技术的范围,即本技术不限于所描述的实施例。
17.在本技术的描述中,需要说明的是,除非另有说明,“多个”的含义是两个以上;术
语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。“垂直”并不是严格意义上的垂直,而是在误差允许范围之内。“平行”并不是严格意义上的平行,而是在误差允许范围之内。
18.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可视具体情况理解上述术语在本技术中的具体含义。
19.为了更好地理解本技术,下面结合图1至图5本技术实施例进行描述。
20.图1是本技术示例性实施例中一种气相外延生长辅助装置的结构示意图;图2是本技术示例性实施例中一种气相外延生长辅助装置的取片动作示意图;图3是本技术示例性实施例中一种气相外延生长辅助装置的研磨状态示意图;图4是本技术示例性实施例中一种气相外延生长辅助装置的防护状态示意图。
21.参照图1,本技术实施例提供了一种气相外延生长辅助装置,包括行走机构100、装置本体200、升降机构300、抓取机构400、研磨机构500、除尘机构600和控制器(图中未画出)。
22.装置本体200可移动的设于石墨盘800上方,石墨盘800位于气相外延生长设备内,并且,石墨盘800表面的中心区域设有片坑810,片坑810用于放置待生长的半导体晶圆。
23.行走机构100连接于装置本体200,并用于移动装置本体200。
24.升降机构300,行走机构100通过升降机构300连接装置本体200,并且,升降机构300能够升降装置本体200。
25.抓取机构400设于装置本体200上,用于抓取半导体晶圆。
26.研磨机构500设于装置本体200上,用于对片坑810表面沉积的外延材料进行研磨。
27.除尘机构600设于装置本体200上,用于除去研磨产生的粉尘。
28.装置本体200吊装在行走机构100上,并能够跟随行走机构100移动,以实现对所抓取的半导体晶圆的搬运。
29.控制器分别连接行走机构100、升降机构300、抓取机构400、研磨机构500和除尘机构600,以进行系统控制。
30.上述气相外延生长辅助装置,行走机构100在移动装置本体200的过程中,可以实现对所抓取的半导体晶圆的搬运。升降机构300能够升降装置本体200,以将所抓取的半导体晶圆搬运至设计高度,还可以升降研磨机构500和除尘机构600,以使研磨机构500和除尘机构600分别能够进行研磨和除尘操作。其中,各机构均由控制器控制。
31.需要说明的是,石墨盘800是一个规则的圆柱体,石墨盘800圆柱体上表面中心区域具有一个圆形凹坑,该圆形凹坑即为片坑810。
32.在一些实施方式中,行走机构100包括轨道110和小车120,小车120设于轨道110上,并能够沿轨道110移动。其中,小车120可以由电机、减速器、联轴器、制动器、及缓冲器、升降连接杆、滑轮等组成。
33.在一些实施方式中,升级机构包括升降杆,升降杆的一端连接行走机构100,另一
端连接装置本体200,升降杆通过伸缩以实现装置本体200的升降。
34.在一些实施方式中,抓取机构400包括夹爪410和驱动组件420;夹爪410设于装置本体200上,并具有抓取半导体晶圆的第一形态和放下半导体晶圆的第二形态;驱动组件420设于装置本体200上并连接夹爪410,用于驱使夹爪410切换为第一形态或者第二形态。如图1-2所示,夹爪410具有多个夹指,当多个夹指分开时,夹爪410呈第二形态,当多个夹指合拢时,夹爪410呈第一形态。其中,夹爪410的轴线与装置本体200的轴线重合。
35.在本实施例中,夹爪410能够在驱动组件420的驱使下变换形态,以抓取或者放下半导体晶圆,相对于利用人工使用吸笔或者镊子进行取片操作,该抓取机构400的取片力度可控,且可以避免人工操作而产生的误差或者误操作。
36.在一些实施方式中,夹爪410包括多个连杆机构,连杆机构包括l型连杆411和直连杆412;直连杆412的两端分别与装置本体200和l型连杆411的折弯处铰接;l型连杆411的第一端与驱动组件420铰接,并能够受驱动组件420驱使相对装置本体200沿直线方向移动,以使夹爪410在第一形态和第二形态之间变化。
37.如图1-2所示,l型连杆411的第一端能够沿装置本体200的轴向(高度方向)移动,以此来改变夹爪410形态。具体地,多个连杆机构沿装置本体200的周向分布。当l型连杆411的第一端竖直向上移动时,l型连杆411绕其与直连杆412的铰接点旋转,l型连杆411的第二端相互靠拢,直至l型连杆411的第一端竖直向上移动至第一预设高度时,夹爪410呈第一形态,多个l型连杆411的第二端可以夹持半导体晶圆;当l型连杆411的第一端竖直向下移动时,l型连杆411绕其与直连杆412的铰接点旋转,l型连杆411的第二端相互远离,即可以解除对半导体晶圆的夹持动作,直至l型连杆411的第一端竖直向下移动至第二预设高度时,夹爪410呈第二形态。
38.在一种情况下,为了实现上述驱动组件420的功能,驱动组件420包括传动杆421和安装座422;传动杆421沿直线方向设于装置本体200上,并能够相对装置本体200周向旋转;安装座422套接于传动杆421上,并能够在传动杆421周向旋转过程中沿传动杆421的轴向移动;l型连杆411的第一端与安装座422铰接。可以理解,安装座422和传动轴构成滚珠丝杠结构。如图1-2所示,多个l型连杆411沿安装座422的周向分布,并且,每个l型连杆411的第一端均与安装座422的侧面铰接。当传动杆421周向旋转时,安装座422能够带动l型连杆411的第一端沿竖直方向移动,从而使l型连杆411的第二端相互靠拢或者相互远离。其中,传动轴可以通过旋转气缸等驱动以实现周向旋转。
39.在另一种情况下,为了实现上述驱动组件420的功能,驱动组件420包括传动杆421;传动杆421沿直线方向设于装置本体200上,并能够沿直线方向移动;l型连杆411的第一端与传动杆421铰接。如图1-2所示,传动杆421沿竖直方向设置,多个l型连杆411沿传动杆421的周向分布,并且,每个l型连杆411的第一端均与传动杆421的侧面铰接。当传动杆421沿竖直方向移动时,其可以带动l型连杆411的第一端沿竖直方向移动,从而使l型连杆411的第二端相互靠拢或者相互远离。其中,传动轴可以通过伸缩气缸等驱动以实现直线移动。
40.需要说明的是,上述抓取机构400仅是能够实现取放片效果的一些具体实施方式,不对本技术的保护范围进行限定。在其他实施例中,抓取机构400还可以采用其他结构设计,例如,抓取机构400可以采用三抓气缸等。
41.在一些实施方式中,装置本体200上设有环形座210,环形座210与传动杆421同心设置;装置本体200通过环形座210的外周面与直连杆412铰接。其中,环形座210为圆环状,直连杆412的第一端铰接在环形座210的外周。在本实施例中,在装置本体200上设置与传动杆421同心设置的环形座210,并利用环形座210与直连杆412铰接连接,相对于将直连杆412和装置本体200直接铰接连接,可以实现对直连杆412的快速定位及安装。
42.在一些实施方式中,研磨机构500包括气动马达510、夹头520和磨头530,磨头530通过夹头520设于气动马达510的输出端,气动马达510能够施加扭力使磨头530旋转,以进行研磨操作。
43.在一些实施方式中,除尘机构600包括吸尘器610和吸气管道620,吸尘器610的吸气端连接吸气管道620,吸气管道620的进气口靠近研磨机构500。如图5所示,吸气管道620沿高度方向设置,并且,吸气管道620的进气口位于磨头530的侧面,当进行研磨操作时,吸尘器610可以及时吸气收集研磨产生的粉尘。除尘机构600除了可以除去研磨过程中产生的粉尘,还可以在外延生长之前去除石墨盘800表面遗留的粉尘等杂质。
44.进一步地,吸气管道620采用伸缩设计。例如,在收缩状态下,吸气管道620的下端高于磨头530的工作端,在伸展状态下,吸气管道620的下端低于磨头530的工作端,当吸气管道620处于伸展状态时,除尘机构600才会进行除尘操作。
45.在一些实施方式中,控制器可以是pcl控制器。
46.在一些实施方式中,装置本体200上设有转盘220,装置本体200通过转盘220连接研磨机构500及除尘机构600,并能够通过转盘220旋转研磨机构500及除尘机构600,以使研磨机构500及除尘机构600沿片坑810的周向移动。如图1-2所示,装置本体200的底部设有转盘220,转盘220与装置本体200同轴设置,并能够周向旋转,转盘220的下端面安装研磨机构500及除尘机构600,当转盘220周向旋转时,研磨机构500及除尘机构600可以沿片坑810的周向移动。
47.可以理解,转盘220能够增加研磨机构500及除尘机构600在片坑810表面的作业范围。
48.进一步的,研磨机构500及除尘机构600能够沿转盘220的径向移动。例如,转盘220的下端面可以沿转盘220的径向设置直线模组,研磨机构500及除尘机构600安装在直线模组上,直线模组能够驱使研磨机构500及除尘机构600沿转盘220的径向移动。
49.可以理解,研磨机构500及除尘机构600采用可移动设计,能够改变研磨机构500及除尘机构600的工作半径,使研磨机构500及除尘机构600作用于片坑810的整个表面。
50.在一些实施方式中,装置本体200上设有防护罩230,防护罩230具有缩回装置本体200的第一状态以及笼罩石墨盘800的第二状态;当对片坑810进行研磨时,防护罩230切换为第二状态以防止粉尘四散。如图1-4所示,防护罩230为漏斗状,其套装在装置本体200外,在对片坑810进行研磨之前,防护罩230轴向展开至第一状态,在对片坑810进行研磨时,防护罩230轴向收缩至第二状态。
51.为了实现防护罩230的状态变化效果,防护罩230可以由伸缩管和绳索制作而成。例如,防护罩230包括锥形伸缩管,沿锥形伸缩管的母线方向穿设绳索,当锥形伸缩管的第一端拉拽绳索时,绳索会带动锥形伸缩管的第二端向第一端移动,以缩回至装置本体200的侧面,当松开绳索时,锥形伸缩管的第二端在重力作用下下垂,并能够笼罩石墨盘800。
52.需要说明的是,防护罩230不限于本技术实施例的锥形伸缩管和绳索的结构设计。
53.为了便于观察片坑810表面的情况,防护罩230可以为透明材质,在研磨过程中,操作人员能够透过防护罩230观察片坑810表面的研磨情况。优选地,防护罩230由抗氧化材料制作。
54.在一些实施方式中,装置本体200上设有第一检测单元700,用于检测装置本体200相对石墨盘800的位置。
55.可以理解,在取放半导体晶圆的过程中,可以利用第一检测单元700检测装置本体200(夹爪410)相对石墨盘800的位置,从而控制器可以根据检测到的装置本体200(夹爪410)的位置控制行走机构100移动,以调整装置本体200(夹爪410)的位置使其中心与片坑810的中心上下对齐。
56.为了实现检测功能,第一检测单元700可以包括两个图像采集器,两个图像采集器分别设于装置本体200的相对两侧,并且,两个图像采集器分别能够绕装置本体200进行360
°
旋转并对石墨盘800的图像进行采集,当拍摄的两幅图像相同时,则可以确定夹爪410的中心与片坑810的中心上下对齐,并通过降低夹爪410的高度进行半导体晶圆的取放。
57.进一步地,第一检测单元700的两个图像采集器可收缩的设于装置本体200的侧面,并且,仅在需要进行位置或者高度检测时伸出。
58.需要说明的是,上述第一检测单元700检测位置的方式可根据实际要求设置,而不限于上面讨论的实施方式。
59.在一些实施方式中,装置本体上设有第二检测单元(图中未画出),用于检测装置本体200相对片坑810表面或者石墨盘800表面的距离。
60.可以理解,在对片坑810进行研磨或者除尘之前,可以利用第二检测单元检测研磨机构500或者除尘机构600相对片坑810的距离,从而控制器可以根据检测到的距离控制升降机构300将研磨机构500降至目标高度(略高于片坑810的表面)。
61.为了实现检测功能,第二检测单元可以采用与第一检测单元700相同的设计,以检测研磨机构500或者除尘机构600相对片坑810的距离。具体地,可以通过对图像中目标区域或者目标特征的大小来判断距离。可选地,第二检测单元可以设于研磨机构500上,例如,第二检测单元设于气动马达510的侧面。
62.需要说明的是,上述第二检测单元检测距离及位置的方式可根据实际要求设置,而不限于上面讨论的实施方式。
63.以下具体说明上述一种气相外延生长辅助装置的工作过程。
64.1、在外延生长前,利用除尘机构600去除石墨盘800表面遗留的粉尘等杂质。
65.具体地,由行走机构100带动装置本体200从初始位置移动到石墨盘800上方,再将第一检测单元700的两个图像采集器向外延伸一定的距离,直至图像采集器的视野可以覆盖石墨盘800的边缘,使两个图像采集器绕装置本体200进行360
°
旋转,对石墨盘800整体进行旋转探测识别并判断装置本体200的中心与石墨盘800的中心是否对齐,若否,则存在误差,可以利用行走机构100移动装置本体200进行微调,直至装置本体200的中心与石墨盘800的中心对齐;待位置调整好后,利用升降杆使装置本体200下移一定高度,再由第二检测单元检测装置本体与石墨盘800表面的距离,并根据检测到的距离伸展吸气管道620使其下端超过磨头530的工作端,直至吸气管道620的下端靠近片坑810表面,打开吸尘器610,对石
墨盘800表面(含片坑810表面)进行除尘操作;除尘完毕后,将除尘机构600和第一检测单元700还原。
66.2、在除尘完毕后及外延生长前,利用抓取机构400进行取料。
67.具体地,由行走机构100带动装置本体200移动到半导体晶圆上料区,并利用夹爪410夹取半导体圆晶,即完成取料。
68.3、在取料后,进行上料。
69.具体地,由行走机构100带动装置本体200移动到石墨盘800上方,再由第一检测单元700和走机构100调整装置本体200的位置,使装置本体200的中心与石墨盘800的中心对齐;待位置调整好后,再利用第二检测单元检测装置本体200(夹爪410)与石墨盘800表面的距离,并根据检测到的距离驱动升降机构300使夹爪410夹取的半导体晶圆下移至预定高度(距离石墨盘8001.5mm),在通过将夹爪410慢慢张开,使半导体晶圆落入片坑810内;最后将辅助装置复原并移动到初始位置。
70.4、在外延生成结束后,由行走机构100带动装置本体200移动到石墨盘800上方,再由第一检测单元700和走机构100调整装置本体200的位置,使装置本体200的中心与石墨盘800的中心对齐;待位置调整好后,利用升降杆使装置本体200下移一定高度,再由第二检测单元检测装置本体200(夹爪410)与石墨盘800的距离,并根据检测到的距离调整装置本体200(夹爪410)的高度,使夹爪410能够夹取生长后的半导体晶圆;待夹取生长后的半导体晶圆后,利用升降杆使装置本体200上升至初始高度,再利用行走机构100将生长后的半导体晶圆送至半导体晶圆下料区;最后将辅助装置复原并移动到初始位置。
71.5、在上述步骤结束后,由行走机构100带动装置本体200移动到石墨盘800上方,再由第一检测单元700和走机构100调整装置本体200的位置,使装置本体200的中心与石墨盘800的中心对齐;待位置调整好后,利用升降杆使装置本体200下移一定高度,再由第二检测单元检测装置本体200与片坑810的距离,并根据检测到的距离调整装置本体200的高度,使研磨机构500能够对片坑810表面沉积的外延材料进行研磨。在该步骤中,防护罩230需展开至第二状态,以笼罩整个石墨盘800,并且,除尘机构600与研磨机构500同步运行。
72.上述辅助装置可以用于气相外延生长设备,其能够在气相外延生长工艺过程中实现取放晶圆、研磨石墨盘800和除尘等机械自动一体化操作,相对于传统工艺中由人工操作的方式,该辅助装置能够解放人工,同时避免人工操作引起的误差和误操作,从而保证产品良率。并且,该辅助装置集成了多项功能设计,使得气相外延生长设备不再需要配置各种专用工具,且在外延生长工艺过程中,可以减少人工操作时更换不同工具所需的时间,从而缩短工艺周期。
73.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1