基于机器人技能学习的细胞培养系统与工作方法
本发明涉及机器人控制,具体为基于机器人技能学习的细胞培养系统与工作方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、细胞培养设备需要在保证环境洁净度的前提下,借助机械装置实现培养流程自动化。由于要满足洁净环境的需求,这类设备需要将各部件压缩到有限的空间中,并在封闭的有限空间内部进行自动化作业。
3、若要实现自动化细胞培养,会以离线编程的方式进行控制,即控制程序在装置未运行时,根据细胞培养的作业任务划分为几个作业模块,在针对每个作业模块进行动作拆解,并根据拆解后的每个动作形成针对每个执行机构的控制参数。
4、发明人发现,采用离线编程的方式,则装置或设备需要在作业开始之前预先设计好针对某个培养任务的控制参数,若作业期间的任务发生变化或是作业环境发生变化,装置或设备无法自行适应变化后的作业任务需求或作业环境,从而导致自动化作业过程中断。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供基于机器人技能学习的细胞培养系统与工作方法,细胞培养作业可以拆解为多个最底层的动作,在进行不同的细胞培养作业任务时,通过组合多个最底层的动作来完成,最底层的动作作为能够组合的运动基元是单独的任务,多个运动基元组合成为针对每个作业任务的任务集,最底层的动作数据可以通过人工示教得到,则根据不同的作业任务来更新对最底层动作的控制参数,也就更新了每个任务集中运动基元的参数,使机器人能够在处理不同类型的细胞培养任务时快速适应新的任务并学习到新的技能,从而实现自主操作,使得机器人在细胞培养过程中具备了灵活性和适应性,能够应对不同的培养情况和要求。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供基于机器人技能学习的细胞培养系统,包括:
4、机器人本体,具有机械臂和夹爪,用于执行细胞培养作业;
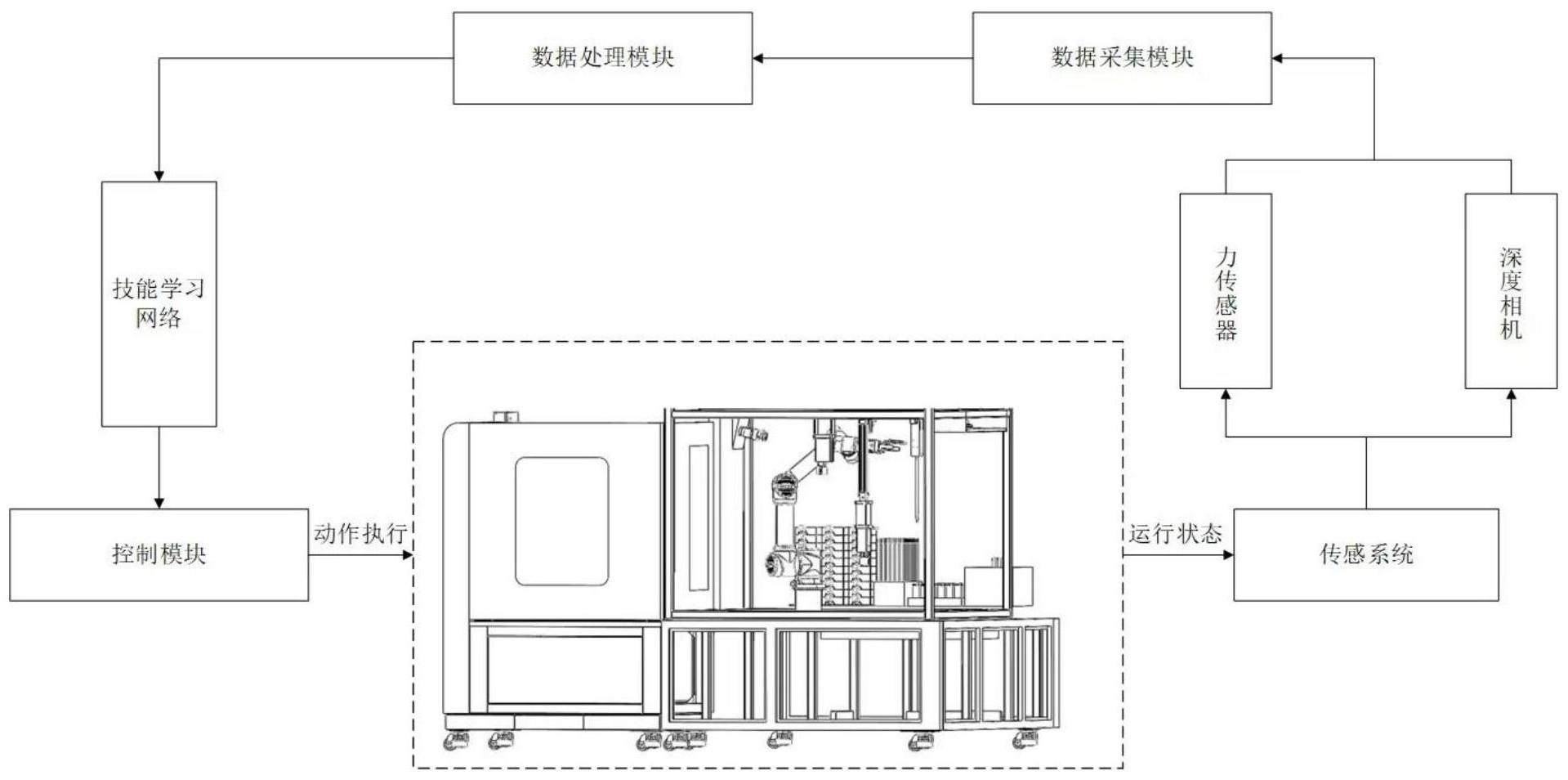
5、数据采集模块,获取机器人本体在细胞培养过程中的图像信息、机械臂的位姿信息和夹爪的力矩信息,传递给数据处理模块得到所需的控制参数;
6、控制模块,根据数据处理处理模块输出的控制参数向机器人本体发出控制指令;
7、其中,数据处理模块被配置为:将细胞培养作业拆解为多个动作,划分出能够组合的运动基元,多个运动基元组合形成针对每个作业任务的任务集,通过人工示教获取运动基元所需的训练数据,以完成作业任务为目标训练运动基元,训练期间根据作业任务更新运动基元的参数。
8、机器人本体包括并列布置的细胞仓和作业仓,作业仓内设有图像采集装置,机械臂位于作业仓内,夹爪上设有力传感器,夹爪包括旋拧夹爪和柔性夹爪;作业仓内还设有移液模块、培养瓶、滴定管、冻存管、离心管、离心机、线性模块和复苏模块。
9、数据处理模块具有技能学习网络,技能学习网络包括自编码器网络、元学习网络、动态运动基元模块和有限状态机模块。
10、自编码器网络经过训练后,基于机器人本体在细胞培养过程中的图像信息、机械臂的位姿信息和夹爪的力矩信息,经预处理后作为自编码器网络的输入,输出为重构后的机器人状态空间数据。
11、自编码器网络的编码器将机器人获取的状态空间数据映射到潜在空间,解码器将潜在空间中的变量映射回机器人的行动空间,通过最小化重构误差,自编码器能够学习到机器人行动和感知的有效表示,实现机器人的自省。
12、动态运动基元模块,被配置为:将细胞培养作业拆解为多个子任务,并分解为多个动作,不同的子任务通过组合多个不同的动作来完成,每个动作作为单独的任务并能够组合形成针对每个子任务的任务集,任务集中的动作作为运动基元;
13、通过人工示教获取训练运动基元所需的数据,包括三维线速度信号、三维角速度信号、三维力信号和三维力矩信号;
14、基于人工示教获取的数据建立数据集,针对每个任务,生成该任务的训练集和测试集;
15、定义初始的动态运动基元模型,利用训练集和测试集并基于元学习网络完成训练。
16、元学习网络包括内部循环和外部循环,在每个任务的内部循环中,基于训练集和来自于外部循环的参数更新并进行训练,这些任务的参数更新共同组成一个任务集合并输出给外部循环;
17、在外部循环中,元学习器使用来自内部循环的任务集合来更新自身的参数,产生的输出作为内部循环的输入。
18、训练期间,根据不同任务中动作的组合,更新运动基元模型的参数。
19、训练完毕的运动基元模型基于有限状态机模块,将完成细胞培养所需的控制参数发送给控制模块,控制模块根据得到的控制参数向机器人本体发出控制指令。
20、本发明的第二个方面提供实现上述系统的工作方法,包括以下步骤:
21、细胞复苏;
22、洗涤提纯;
23、细胞扩增;
24、细胞收获出库。
25、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
26、1、将细胞培养作业拆解出的动作作为运动基元,多个运动基元组合成为针对每个作业任务的任务集,根据不同的作业任务来更新运动基元的控制参数,使机器人能够在处理不同类型的细胞培养任务时快速适应新的任务并学习到新的技能,相较于以往需要离线编程的方法,能够适应不同的培养流程和操作要求,可以减少人工干预,提高培养效率和稳定性,并且能够保证细胞培养的标准化和规范化。同时具备了灵活性和适应性,能够应对不同的培养情况和要求,实现细胞培养全流程的过程优化。
27、2、作业环境变化时,机器人需要快速适应新的环境,利用自编码器学习到的环境向量作为一个先验知识,基于元学习的方法来调整控制参数,使得机器人可以快速适应新环境,期间的自适应控制是基于环境感知的,而不是预先定义的控制策略,因此具有更好的泛化能力。
28、3、元学习网络可以使机器人在不同的环境下快速的学习新的任务,而不需要重新训练整个模型,可以大大减少训练时间和资源消耗,同时可以训练模型在不同的任务和环境下具有高度的泛化能力,从而可以应用于广泛的实际应用中。
技术特征:
1.基于机器人技能学习的细胞培养系统,其特征在于,包括以下步骤:
2.如权利要求1所述的基于机器人技能学习的细胞培养系统,其特征在于,所述机器人本体包括并列布置的细胞仓和作业仓,作业仓内设有图像采集装置,机械臂位于作业仓内,夹爪上设有力传感器,夹爪包括旋拧夹爪和柔性夹爪。
3.如权利要求2所述的基于机器人技能学习的细胞培养系统,其特征在于,所述作业仓内还设有移液模块、培养瓶、滴定管、冻存管、离心管、离心机、线性模块和复苏模块。
4.如权利要求1所述的基于机器人技能学习的细胞培养系统,其特征在于,所述数据处理模块具有技能学习网络,技能学习网络包括自编码器网络、元学习网络、动态运动基元模块和有限状态机模块。
5.如权利要求4所述的基于机器人技能学习的细胞培养系统,其特征在于,所述自编码器网络经过训练后,基于机器人本体在细胞培养过程中的图像信息、机械臂的位姿信息和夹爪的力矩信息并经预处理,作为自编码器网络的输入,输出为重构后的机器人状态空间数据。
6.如权利要求5所述的基于机器人技能学习的细胞培养系统,其特征在于,所述自编码器网络的编码器将机器人获取的状态空间数据映射到潜在空间,解码器将潜在空间中的变量映射回机器人的行动空间,通过最小化重构误差,自编码器能够学习到机器人行动和感知的有效表示,实现机器人的自省。
7.如权利要求4所述的基于机器人技能学习的细胞培养系统,其特征在于,所述动态运动基元模块,被配置为:将细胞培养作业拆解为多个子任务,并分解为多个动作,不同的子任务通过组合多个不同的动作来完成,每个动作作为单独的任务并能够组合形成针对每个子任务的任务集,任务集中的动作作为运动基元;
8.如权利要求7所述的基于机器人技能学习的细胞培养系统,其特征在于,所述元学习网络包括内部循环和外部循环,在每个任务的内部循环中,基于训练集和来自于外部循环的参数更新并进行训练,这些任务的参数更新共同组成一个任务集合并输出给外部循环;
9.如权利要求8所述的基于机器人技能学习的细胞培养系统,其特征在于,训练完毕的运动基元模型基于有限状态机模块,将完成细胞培养所需的控制参数发送给控制模块,控制模块根据得到的控制参数向机器人本体发出控制指令。
10.基于权利要求1-9任一项所述系统的工作方法,其特征在于,包括以下步骤:
技术总结
本发明涉及基于机器人技能学习的细胞培养系统与工作方法,包括机器人本体,具有机械臂和夹爪,用于执行细胞培养作业;数据采集模块,获取机器人本体在细胞培养过程中的图像信息、机械臂的位姿信息和夹爪的力矩信息,并传递给数据处理模块输出对应的结果;控制模块,根据数据处理处理模块输出的结果向机器人本体发出控制指令;其中,数据处理模块将细胞培养作业拆解为多个动作,划分出能够组合的运动基元作为单独的任务,多个运动基元组合形成针对每个作业任务的任务集,通过人工示教获取训练运动基元所需的数据,以完成作业任务为目标训练运动基元,训练期间根据不同作业任务更新运动基元的参数。
技术研发人员:宋锐,信德君,李倩倩,王艳红,杜付鑫
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!