自动驾驶换道的纵向规划方法、系统、车辆及存储介质与流程
1.本发明属于汽车自动驾驶技术领域,具体涉及一种自动驾驶换道的纵向规划方法、系统、车辆及存储介质。
背景技术:
2.汽车自动驾驶过程中进行换道时,需要达到即安全又平稳的效果。相对于不需要换道的情况,换道过程中既要与目标车保持适当的安全距离(不能与目标车跟的太近),又要尽可能避免或者弱化换道过程中的负加速度(指加速度为负值时),同时还必须保证车辆运行过程中的舒适性。如何实现这几个功能的兼顾是自动驾驶过程中的一大难题。
3.因此,有必要开发一种新的自动驾驶换道的纵向规划方法、系统、车辆及存储介质。
技术实现要素:
4.本发明的目的是提供一种自动驾驶换道的纵向规划方法、系统、车辆及存储介质,能在一定程度上减少或者减弱换道过程因为约束车导致的减速。
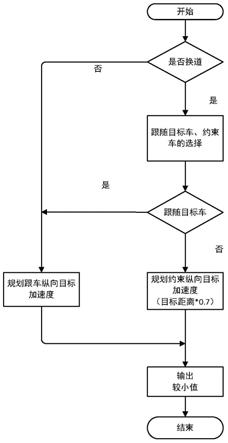
5.第一方面,本发明所述的一种自动驾驶换道的纵向规划方法,包括:(1)车辆选择在换道过程中,将目标车道的前车作为跟随目标车,当前车道的前车作为约束车;在不换道时,将当前车道的前车作为跟随目标车,约束车不存在;(2)目标距离选择根据本车车速规划出目标距离dtarget;对于跟随目标车,目标距离为dtarget;对于约束车,目标距离为a*dtarget,a为修正系数;(3)单目标纵向加速度规划对于跟随目标车,基于本车信息、跟随目标车信息以及目标距离dtarget规划出跟车纵向目标加速度acc_follow;对于约束车,基于本车信息、约束车信息以及目标距离a*dtarget规划出约束纵向目标加速度acc_constraint;(4)多目标纵向加速度选择将跟车纵向目标加速度acc_follow和约束纵向目标加速度acc_constraint的较小值作为输出的纵向目标加速度。
6.进一步,所述修正系统a为标定量。
7.进一步,所述修正系统a为0.7。
8.第二方面,本发明所述的一种自动驾驶换道的纵向规划系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时,能执行如本发明所述自动驾驶换道的纵向规划方法的步骤。
9.第三方面,本发明所述的一种车辆,采用如本发明所述的自动驾驶换道的纵向规划系统。
10.第四方面,本发明所述的一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时,能执行如本发明所述自动驾驶换道的纵向规划方法的步骤。
11.本发明具有以下优点:相对于跟随目标车,针对约束车规划出的目标距离会更小。进而规划出的目标车速就越高,最终规划出的目标负加速度就越弱,从而能够在一定程度上减少或者减弱换道过程因为约束车导致的减速。同时,由于在换道过程中始终将当前车道和目标车道纳入考虑,因此最终规划出的目标负加速度也不会存在明显的跳变;这样就能够从目标负加速度的大小和平滑性上提升用户体验。而对于约束车,目标距离是在跟随目标车的目标距离的基础上乘以修正系数,尽管目标距离相对于跟随目标车的目标距离较小,但是约束车只在换道的短时间内起作用,因此在换道的短时间内不会存有安全风险。
附图说明
12.图1是本实施例中获取长期自学习角度流程图;图2是本实施例中转角控制命令纠正流程图。
具体实施方式
13.下面结合附图对本发明作进一步说明。
14.如图1和图2所示,一种自动驾驶换道的纵向规划方法,包括:(1)车辆选择在换道过程中,将目标车道的前车作为跟随目标车,当前车道的前车作为约束车;在不换道时,将当前车道的前车作为跟随目标车,约束车不存在;(2)目标距离选择根据本车车速规划出目标距离dtarget;对于跟随目标车,目标距离为dtarget;对于约束车,目标距离为a*dtarget,a为修正系数;(3)单目标纵向加速度规划对于跟随目标车,基于本车信息、跟随目标车信息以及目标距离dtarget规划出跟车纵向目标加速度acc_follow;对于约束车,基于本车信息、约束车信息以及目标距离a*dtarget规划出约束纵向目标加速度acc_constraint;(4)多目标纵向加速度选择将跟车纵向目标加速度acc_follow和约束纵向目标加速度acc_constraint的较小值作为输出的纵向目标加速度。
15.本实施例中,所述修正系统a为标定量。 所述修正系统a为0.7。
16.本方法的关键点在于第(2)步,对于约束车采用修正系数a对其目标距离进行修正。如果没有这样的修正,仅采用上述(1)、(3)、(4)的步骤规划换道过程中纵向目标加速度,就会存在一定的局限性,例如:如果在换道过程中跟随目标车不存在,本车与约束车的实际距离为0.8* dtarget。此
时acc=acc_constraint。
17.如果对约束车的目标距离不进行修正,计算出的距离误差为负值,acc_constraint为负值,本车会减速。
18.如果将约束车的目标距离修正为0.7* dtarget,计算出的距离误差为正值,对应的acc_constraint为正值。在这种情况下就能够实现加速换道,避免不必要的减速。
19.由于约束车只存在于换道过程(通常情况下,启动8s内会完成换道)这一短时间内,从驾驶员的主观感觉上是允许适当减小跟车的目标距离的。因此,对于约束车的目标距离乘以0.7这样的修正系数是合理的。
20.经过理论分析,除了上述特定情况,在任何其他情况下,对于约束目标距离乘以0.7的系数进行修正都能够减少换道过程中的减速的频率和减速的力度,从而提高了用户的舒适性,而采用0.7倍的目标距离也能够保证安全。
21.本实施例中,一种自动驾驶换道的纵向规划系统,包括存储器和控制器,所述存储器内存储有计算机可读程序,所述计算机可读程序被控制器调用时,能执行如本实施例中所述自动驾驶换道的纵向规划方法的步骤。
22.本实施例中,一种车辆,采用如本实施例中所述的自动驾驶换道的纵向规划系统。
23.本实施例中,一种存储介质,其内存储有计算机可读程序,所述计算机可读程序被调用时,能执行如本实施例中所述自动驾驶换道的纵向规划方法的步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1