一种用于牙科工厂的自动物料传输系统的制作方法
1.本实用新型涉及牙科物料运输领域,具体涉及一种用于牙科工厂的自动物料传输系统。
背景技术:
2.隐形矫治器又称为“舌侧矫治”,不会影响到美观,深受大家的喜爱。相对于金属牙套使用弓丝和托槽矫正牙齿,隐形牙套通过一系列透明的、可自行摘戴的无托槽隐形矫正器矫正牙齿,而且矫正期间不使用牙套和托槽的金属弓丝。
3.而在隐形矫正器的生产过程中,牙模、膜片等生产原料及压膜完成的成品都需要在不同产线单元间进行较为复杂的传输。目前的传输方式自动化程度不高,大部分为纯人工运输或者人工加传送带的运输方式。这不仅导致了隐形矫正器生产效率低下,也使得生产成本随着人力成本的上升逐渐提高。因此我们有必要针对现有技术的不足而提供一种用于牙科工厂的自动物料传输系统。
技术实现要素:
4.发明目的:为了克服现有技术中的不足,本实用新型提出一种用于牙科工厂的自动物料传输系统,通过agv小车配合托盘机、接驳台实现牙科物料在不同加工区域之间的自动化传输,有效提高牙科物料的运输效率,节省人力物力,降低生产成本。
5.技术方案:为了实现上述目的,本实用新型提出一种用于牙科工厂的自动物料传输系统,包括第一加工区域、第二加工区域和在第一加工区域与第二加工区域之间运输物料的agv小车;
6.所述第一加工区域内设置托盘机,通过托盘机将装载物料的托盘送至agv小车上,所述第二加工区域内设置第二输送带和接驳台,通过接驳台接收agv小车上的物料托盘,所述接驳台一侧布置有第二工业机器人,用于将接驳台上托盘内的物料转运至第二输送带上。
7.进一步地,所述第一加工区域内还设置第一牙科加工设备、第一输送带,所述第一输送带布置于第一牙科加工设备与托盘机之间,所述托盘机一侧布置有第一工业机器人,用于将第一输送带上的物料转运至托盘机上的托盘内。
8.进一步地,所述第二加工区域内沿第二输送带设置第二牙科加工设备,通过第二输送带向第二牙科加工设备传送物料。
9.进一步地,所述第二牙科加工设备与第二输送带之间设置地轨,且地轨上设置用于抓取物料的第三工业机器人。
10.进一步地,所述托盘机与接驳台之间设置供agv小车行走的电磁轨道。
11.进一步地,所述托盘机和接驳台上均设置用于检测agv小车是否到位的接近开关。
12.进一步地,所述agv小车上设置送料机构,用于实现托盘的上下传送,所述送料机构包括对称设置的两个挡板、设置在两个挡板之间的传送带。
13.有益效果:本实用新型提出的一种用于牙科工厂的自动物料传输系统,具有以下效果:、
14.1、通过agv小车配合托盘机、接驳台实现牙科物料在不同生产单元的自动化传输,即使在无人操作的情况下,也能够实现生产单元之间的全自动物料传输,有效提高了物料的运输效率,节约了人力成本;
15.2、通过在agv小车上增加送料机构,有效解决了agv小车的对接问题,用简单的方式使得agv小车可以轻松实现自动上下料的功能,同时托盘运输的方式可实现批量上下料,减少了agv小车的等待时间,大大提高了运输效率,降低了整体的运输成本。
附图说明
16.下面结合附图对本实用新型作进一步描写和阐述。
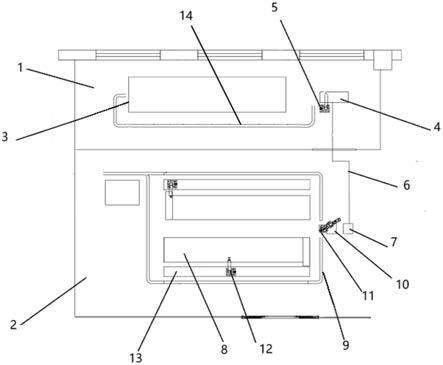
17.图1是本实用新型优选实施方式的整体结构示意图。
18.图2是本实用新型优选实施方式中agv小车上送料机构的结构示意图。
19.附图标记:1、第一加工区域;2、第二加工区域;3、第一牙科加工设备;4、托盘机;5、第一工业机器人;6、电磁轨道;7、agv小车;7
‑
1、挡板;7
‑
2、传送带;7
‑
3、对射光电传感器;8、第二牙科加工设备;9、第二输送带;10、接驳台;11、第二工业机器人;12、第三工业机器人;13、地轨;14、第一输送带、15、托盘。
具体实施方式
20.下面将结合附图对本实用新型的优选实施方式进行描述,以更加清楚、完整地阐述本实用新型的技术方案。
21.如图1所示为一种用于牙科工厂的自动物料传输系统的优选实施方式,包括第一加工区域1、第二加工区域2和运行在第一加工区域1与第二加工区域2的agv小车7。
22.其中,第一加工区域1内设置第一牙科加工设备3、第一输送带14和托盘机4,第一牙科加工设备3包括3d打印机及后处理模块,3d打印机用于实现牙模的打印成型,后处理模块用于对牙模进行后处理,处理后的牙模通过第一输送带14传送至托盘机4处,通过托盘机4旁的第一工业机器人5将牙模抓取并放置于托盘机4上的托盘内。
23.为提高物料传输效率,当托盘即将放满牙模时,就提前发出取货信号给agv小车7,通知其来取走装满牙模的托盘,当agv小车7到达托盘机4时,由托盘机4上的接近开关检测小车是否停靠到位,当小车停靠到位,托盘机4则开始通过滚轴将托盘移至小车上。
24.为保证运输稳定性,第一加工区域1与第二加工区域2之间布置供agv小车7行走的电磁轨道6,电磁轨道6从托盘机停靠处延伸至接驳台停靠处。
25.第二加工区域2内设置第二牙科加工设备8、第二输送带9和接驳台10,第二输送带9布置于接驳台10与第二牙科加工设备8之间,接驳台10一侧设置用于抓取物料的第二工业机器人11,第二牙科加工设备8包括压膜机组和切边机组,通过第二输送带9向压膜机组和切边机组传送牙模。
26.当agv小车7按照预设的电磁轨道6将托盘运送至接驳台10时,由接驳台10上的接近开关检测小车是否停靠到位,当小车停靠到位则通过传送带将托盘移至接驳台10上,进而通过第二工业机器人11将托盘上的牙模抓取至第二输送带9上进行上料,当托盘上的牙
模全部抓取完成,则本次上料完成,上料完成后接驳台10会将空托盘移至空托盘待取区。
27.作为本实用新型的一种技术优化方案,接驳台10两侧分别设置一条输送带进行上料传输,且每个第二输送带9对应一条加工产线。当小车上的托盘移至接驳台10上时,通过第二工业机器人11根据排料策略将托盘上的牙模抓取至相应的第二输送带9上进行上料,从而有效提高第二加工区域的加工效率。
28.作为本实用新型的一种技术优化方案,第二牙科加工设备8与对应第二输送带9之间设置地轨13,地轨13上设置用于抓取物料的第三工业机器人12,第三工业机器人12可沿地轨13进行移动,并将第二输送带9上的牙模夹持到对应设备上进行加工。
29.为保证机器人的精准定位,第一工业机器人5、第二工业机器人11和第三工业机器人12的机械臂上均安装视觉相机,通过视觉相机实时将照片传输给控制器进行图像识别,然后根据识别结果控制机器人进行牙模的抓取放置。
30.如图2所示,agv小车7上设置送料机构,送料机构包括对称设置的两挡板7
‑
1、设置在两挡板7
‑
1之间的传送带7
‑
2,两挡板7
‑
1的顶部两端分别安装一组对射光电传感器7
‑
3,用于实现传送带上托盘的传送定位,其中托盘15的高度与对射光电传感器7
‑
3的高度相对应。
31.小车上料过程包括:当入料端的对射光电传感器7
‑
3感应到托盘时,传送带7
‑
2开始转动使托盘往里运输,当另一端的对射光电传感器7
‑
3感应到托盘时,传送带7
‑
2停止转动,完成上料,同时agv小车7可以离开去往接驳台10工位。
32.小车下料过程包括:当agv小车7到达接驳台10工位时,输送履带7
‑
2开始反转,将托盘运送至接驳台10上,当出料端(也是入料端)的对射光电传感器7
‑
3感应不到托盘时,输送履带7
‑
2停止转动,agv小车7可以离开接驳台10。
33.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。本实用新型的保护范围由权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1