路径内对象检测的可变阈值的制作方法
1.本公开总体上涉及车辆,并且更具体地涉及基于动态阈值的路径内对象检测。
背景技术:
2.自主车辆是能够在很少或没有用户输入的情况下感测其环境并进行导航的车辆。自主车辆使用诸如雷达、激光雷达、图像传感器等感测装置来感测其环境。自主车辆系统还使用来自全球定位系统(gps)技术、导航系统、车间通信、车辆与基础设施技术和/或线控系统的信息来导航车辆。
3.尽管自主车辆和半自主车辆提供了优于传统车辆的许多潜在优势,但是在某些情况下,可能需要改善车辆的操作。例如,自主车辆系统检测车辆路径中的交通对象,并通过制动、加速、转向、转弯等来控制车辆。这些系统基于沿着车辆路径大约3.6米的固定车道宽度的接近度,将车道分配给对象和本车。在狭窄的城市街道上行驶时,3.6米的车辆路径可能会闯入相邻车道,从而导致某些对象被分配给本车的车道。然后可以基于不在其车道或路径中的对象来控制本车。
4.因此,期望提供用于检测对象的车道的改进系统和方法。还期望提供用于基于动态车道阈值检测车道的改进系统和方法。此外,结合附图以及前述技术领域和背景技术,根据随后的详细描述和所附权利要求,本公开的其他期望特征和特性将变得显而易见。
技术实现要素:
5.提供了用于追踪对象车道分配的系统和方法。在一个实施例中,一种方法包括:通过处理器基于车辆的当前位置接收实时车道宽度数据;通过所述处理器基于所述实时车道宽度计算路径内阈值;通过处理器接收基于车辆中心与车道边缘之间的距离的实时距离数据;通过所述处理器基于所述实时距离数据计算偏移值;通过所述处理器基于路径内阈值追踪对象在车辆传感器系统的视场内的位置;以及通过所述处理器基于对对象的追踪控制车辆。
6.在各个实施例中,从车辆的摄像头接收实时车道宽度数据。
7.在各个实施例中,从车辆的存储地图数据的数据存储装置接收实时车道宽度数据。
8.在各个实施例中,计算偏移值还基于偏移率和实时车道宽度数据。
9.在各个实施例中,该方法还包括基于最大车道宽度和实时车道宽度来计算偏移率;和将偏移率应用于实时距离数据以计算偏移值。
10.在各个实施例中,该方法还包括从偏移值减去实时车道宽度数据的一半。
11.在各个实施例中,该方法还包括基于最小车道宽度和实时车道宽度来计算偏移率;和将偏移率应用于实时距离数据以计算偏移值。
12.在各个实施例中,该方法还包括基于预定义滞后来限制路径内阈值。
13.在各个实施例中,将偏移值应用于路径内阈值包括从左路径内阈值减去偏移值。
14.在各个实施例中,将偏移值应用于路径内阈值包括将偏移值添加至右路径内阈值。
15.根据另一实施例,一种系统包括:传感器系统,配置为提供包括实时车道宽度数据的传感器数据;数据存储系统,配置为提供包括实时车道宽度数据的地图数据;以及处理器,配置为从传感器系统和数据存储系统中的至少一个接收基于车辆的当前位置的实时车道宽度数据;基于实时车道宽度计算路径内阈值;接收基于车辆中心和车道边缘之间的距离的实时距离数据;基于实时距离数据计算偏移值;将偏移值应用于路径内阈值;基于路径内阈值追踪对象在车辆传感器系统的视场内的位置;基于对对象的追踪来控制车辆。
16.在各个实施例中,从传感器系统的摄像头接收实时车道宽度数据。
17.在各个实施例中,从数据存储系统接收实时车道宽度数据。
18.在各个实施例中,处理器还配置成基于最大车道宽度和实时车道宽度计算偏移率;将偏移率应用于实时距离数据以计算偏移值。
19.在各个实施例中,处理器还配置为从偏移值减去实时车道宽度数据的一半。
20.在各个实施例中,处理器还配置为基于最小车道宽度和实时车道宽度来计算偏移率;和将偏移率应用于实时距离数据以计算偏移值。
21.在各个实施例中,处理器还配置为基于预定义滞后来限制路径内阈值。
22.在各个实施例中,将偏移值应用于路径内阈值包括从左路径内阈值减去偏移值。
23.在各个实施例中,处理器通过将偏移值添加到右路径内阈值来将偏移值应用于路径内阈值。
附图说明
24.在下文中,将结合以下附图描述示例性实施例,其中,相同的标号表示相同的元件,附图中:
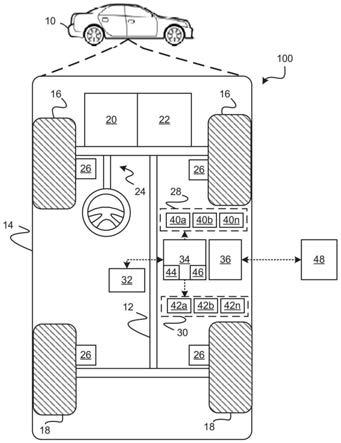
25.图1是示出了根据各个实施例的具有对象追踪系统的自主车辆的功能框图。
26.图2是示出根据各个实施例的包括对象追踪系统的自动驾驶系统的数据流图。
27.图3是示出根据各个实施例的对象追踪系统的数据流图。
28.图4是示出根据各个实施例的可以由对象追踪系统执行的对象追踪方法的流程图。
具体实施方式
29.以下详细描述本质上仅是示例性的,并不旨在限制应用和使用。此外,无意于受到在先前技术领域、背景技术、发明内容或以下详细描述中提出的任何明示或暗示的理论的约束。如本文所使用的,术语模块是指任何硬件、软件、固件、电子控制部件、处理逻辑和/或处理器装置,单独地或以任何组合,包括但不限于:专用集成电路(asic)、电子电路、执行一个或多个软件或固件程序的处理器(共享、专用或成组)和存储器、组合逻辑电路和/或提供所述功能的其他合适部件。
30.在本文中根据功能和/或逻辑块部件以及各种处理步骤来描述本公开的实施例。应当理解,可以通过配置为执行指定功能的任何数量的硬件、软件和/或固件部件来实现这样的块部件。例如,本公开的实施例可以采用各种集成电路部件,例如存储器元件、数字信
号处理元件、逻辑元件、查找表等,其可以在一个或多个微处理器或其他控制装置的控制下执行各种功能。另外,本领域技术人员将理解,可以结合任何数量的系统来实践本公开的实施例,并且本文描述的系统仅仅是本公开的示例性实施例。
31.为了简洁起见,与信号处理、数据传输、发信号、控制和系统的其他功能方面(以及系统的各个操作部件)有关的常规技术在这里可以不进行详细描述。此外,本文包含的各个附图中所示的连接线旨在表示各个元件之间的示例性功能关系和/或物理联接。应当注意,在本公开的实施例中可以存在许多替代或附加的功能关系或物理连接。
32.参考图1,根据各个实施例,总体上以100示出的对象追踪系统与车辆10相关联。通常,对象追踪系统100处理由设置在车辆10周围的一个或多个感测装置提供的数据,或者处理地图数据以预测与车辆10的当前位置相关的车道的实际车道宽度。然后,对象追踪系统100使用预测的车道宽度来定位车辆10(称为主车)的横向位置,并确定何时对象在车辆10的路径中。在各个实施例中,车辆10使用主车位置和对象位置以做出关于使车辆10在环境中导航的决定。
33.如图1中所示,车辆10通常包括底盘12、主体14、前轮16和后轮18。主体14布置在底盘12上并且基本上包围车辆10的部件。主体14和底盘12可以共同形成框架。车轮16-18分别在主体14的相应拐角附近旋转地联接至底盘12。
34.在各个实施例中,车辆10是自主车辆,并且对象追踪系统100被并入自主车辆10(以下称为自主车辆10)中。自主车辆10例如是自动控制以将乘客从一个位置运送到另一位置的车辆。在图示的实施例中,车辆10被描述为乘用车,但是应当理解,可以使用包括摩托车、卡车、运动型多用途车(suv)、休闲车(rv)或简单的机器人等由交通装置监管的任何其他车辆。在示例性实施例中,自主车辆10是所谓的四级或五级自动化系统。四级系统表示“高度自动化”,是指自动驾驶系统对动态驾驶任务的所有方面进行的驾驶模式特定性能,即使驾驶员没有适当地干预要求也是如此。五级系统表示“完全自动化”,是指自动驾驶系统在由驾驶员管理的所有道路和环境条件下针对动态驾驶任务的所有方面的全时性能。可以理解,在各个实施例中,自主车辆10可以是任何自动化水平或根本没有自动化(例如,当系统100简单地将概率分布呈现给用户以供决策时)。
35.如图所示,自主车辆10通常包括推进系统20、传动系统22、转向系统24、制动系统26、传感器系统28、致动器系统30、至少一个数据存储装置32、至少一个控制器34和通信系统36。在各个实施例中,推进系统20可包括内燃机、诸如牵引电机的电机和/或燃料电池推进系统。传动系统22构造成根据可选择的速度比将动力从推进系统20传递至车轮16-18。根据各个实施例,传动系统22可包括步进比自动变速器、无级变速器或其他合适的变速器。制动系统26构造成向车轮16-18提供制动扭矩。在各个实施例中,制动系统26可以包括摩擦制动、线制动、诸如电机的再生制动系统和/或其他合适的制动系统。转向系统24影响车轮16-18的位置。尽管出于说明性目的被描绘为包括方向盘,但是在本公开的范围内构想的一些实施例中,转向系统24可以不包括方向盘。
36.传感器系统28包括一个或多个感测装置40a-40n,其感测自主车辆10的外部环境和/或内部环境的可观察到的状况。感测装置40a-40n包括但不限于,雷达、激光雷达、全球定位系统、光学摄像头、热像仪、超声波传感器、惯性测量单元和/或其他传感器。在各个实施例中,感测装置40a-40n包括一个或多个图像传感器,该图像传感器生成由解释系统100
使用的图像传感器数据。
37.致动器系统30包括一个或多个致动器装置42a-42n,其控制一个或多个车辆特征,例如但不限于推进系统20、传动系统22、转向系统24和制动系统26。在各个实施例中,车辆特征还可以包括内部和/或外部车辆特征,例如但不限于门、行李箱和舱室特征,例如空气、音乐、照明等。
38.通信系统36配置为与其他实体48进行无线通信,例如但不限于其他车辆(“v2v”通信)、基础设施(“v2i”通信)、远程系统和/或个人装置(参考图2进行更详细的描述)。在示例性实施例中,通信系统36是配置为使用ieee802.11标准经由无线局域网(wlan)或通过使用蜂窝数据通信进行通信的无线通信系统。然而,在本公开的范围内还考虑了诸如专用短程通信(dsrc)信道之类的附加或替代通信方法。dsrc信道是指专门为汽车使用而设计的单向或双向短程至中程无线通信通道,以及一组相应的协议和标准。
39.数据存储装置32存储用于自动控制自主车辆10的数据。在各个实施例中,数据存储装置32存储可导航环境的定义地图。在各个实施例中,从车辆10的传感器数据构建定义地图。在各个实施例中,从远程系统和/或其他车辆接收所述地图。可以理解,数据存储装置32可以是控制器34的一部分,与控制器34分离,或者可以是控制器34的一部分,也可以是分离系统的一部分。
40.控制器34包括至少一个处理器44和计算机可读存储装置或介质46。处理器44可以是任何定制的或可商购的处理器、中央处理单元(cpu)、图形处理单元(gpu)、与控制器34相关联的几个处理器中的辅助处理器,基于半导体的微处理器(以微芯片或芯片组的形式)、宏处理器、其任何组合或通常用于执行指令的任何装置。例如,计算机可读存储装置或介质46可以在只读存储器(rom)、随机存取存储器(ram)和保持活动存储器(kam)中包括易失性和非易失性存储器。kam是持久性或非易失性存储器,其可以在处理器44掉电时用于存储各种操作变量。可以使用许多已知的存储器装置中的任何一种来实现计算机可读存储装置或介质46,例如prom(可编程只读存储器)、eprom(电prom)、eeprom(电可擦除prom)、闪存或任何其他能够存储数据的电、磁、光或组合存储装置,数据中的一些表示可执行指令,由控制器34在控制自主车辆10时使用。
41.指令可以包括一个或多个单独的程序,每个程序包括用于实现逻辑功能的可执行指令的有序列表。指令在由处理器44执行时,接收并处理来自传感器系统28的信号,执行用于自动控制自主车辆10的部件的逻辑、计算、方法和/或算法,并产生至致动器系统30的控制信号,以基于逻辑、计算、方法和/或算法来自动控制自主车辆10的部件。尽管在图1中仅示出了一个控制器34,但是,自主车辆10的实施例可以包括通过任意合适的通信介质或通信介质的组合进行通信并且协作以处理传感器信号,执行逻辑、计算、方法和/或算法并产生控制信号以自动控制自主车辆10的特征的任意数量的控制器34。
42.在各个实施例中,控制器34的一个或多个指令被体现在对象追踪系统100中,并且当由处理器44执行时,集成来自感测装置28的实时信息和/或来自数据存储装置的地图信息,并基于其输出对象车道分配。控制器34的指令还利用这些车道分配来决策和计划用于在环境中导航车辆10的即将到来的车辆操纵。
43.可以理解,控制器34可被实现为多个控制器,包括至少一个驻留在车辆上的控制器和至少一个驻留在远离车辆的控制器。在这样的实施例中,对象追踪系统100的功能可以
在任何控制器34上实现,包括部分地在车辆的第一控制器上以及部分地在例如服务器系统上的第二控制器上。
44.可以理解,本文公开的主题为可以被视为标准或基线非自主车辆或自主车辆10和/或协调自主车辆10的基于自主车辆的远程运输系统(未示出)提供某些增强的特征和功能。为此,可以修改、增强或补充基于非自主汽车、自主车辆和基于自主车辆的远程运输系统,以提供下面更详细描述的附加功能。为了示例性目的,下面的示例将在自主车辆的背景下进行讨论。
45.根据各个实施例,控制器34实现如图2所示的自动驾驶系统(ads)50。即,控制器34的合适的软件和/或硬件部件(例如,处理器44和计算机可读存储装置46)用于提供与车辆10结合使用的自动驾驶系统50。
46.在各个实施例中,可以通过功能、模块或系统来组织自动驾驶系统50的指令。例如,如图2所示,自动驾驶系统50可以包括计算机视觉系统54、定位系统56、引导系统58和车辆控制系统60。可以理解的是,在各个实施例中,指令可以被组织成任意数量的系统(例如,组合的、进一步划分的等),因为本公开不限于当前示例。
47.在各个实施例中,计算机视觉系统54合成并处理传感器数据,并预测车辆10的环境的特征和对象的存在、位置、分类和/或路径。在各个实施例中,计算机视觉系统54可以合并来自多个传感器的信息,这些传感器包括但不限于摄像头、激光雷达、雷达和/或任何数量的其他类型的传感器。
48.定位系统56处理处理传感器数据和其它数据,以确定车辆10相对于环境的位置(例如,相对于地图的局部位置、相对于道路的车道的准确位置、车辆前进方向、速度等)。引导系统58处理传感器数据以及其他数据以确定车辆10要遵循的路径。车辆控制系统60根据确定的路径生成用于控制车辆10的控制信号。
49.在各个实施例中,控制器34实施机器学习技术以辅助控制器34的功能,例如特征检测/分类、障碍物缓解、路线穿越、映射、传感器集成、地面真相确定等。
50.在各个实施例中,图1的对象追踪系统100可以包含在ads 50中。例如,对象追踪系统100从计算机视觉系统54、定位系统56接收数据,并将对象追踪数据提供给引导系统58。
51.如关于图3更详细地示出的,继续参考图1和图2,对象追踪系统100包括实时车道宽度确定模块300、车道偏移确定模块302、车道宽度阈值确定模块304和路径内对象确定模块306。
52.实时车道宽度确定模块300确定用于确定车道宽度阈值的实时车道宽度数据314。例如,实时车道宽度确定模块300接收传感器数据308、地图数据308和gps数据312作为输入。当车道信息可用于当前位置(如gps数据312所示)作为传感器数据308和/或地图数据310时,实时车道宽度确定模块300基于数据308和310与车道宽度范围的比较,从接收的数据308或310中选择实时车道宽度。在各个实施例中,该范围是可校准的。例如,当传感器数据308落入该范围内时,将传感器数据308选择为实时车道宽度数据314。在另一示例中,当地图数据310落入该范围内时,将地图数据310选择为实时车道宽度数据314。
53.车道偏移确定模块302确定用于确定车道宽度阈值的偏移数据318。例如,车道偏移确定模块302接收传感器数据316和实时车道宽度数据314。在各个实施例中,传感器数据316指示从车辆10的中心到车道边缘(例如,左侧车道边缘)的测得的横向距离。基于传感器
数据316,车道偏移确定模块302确定偏移率,并使用该偏移率来确定偏移值。
54.例如,车道偏移确定模块302通过基于最大车道宽度和实时车道宽度数据314(例如,最大/车道宽度)来计算最大偏移率。在另一示例中,车道偏移确定模块302基于最小车道宽度和实时车道宽度数据314(例如,最小/车道宽度)来计算最小偏移率。车道偏移确定模块302然后通过将偏移率应用于传感器数据316并减去实时车道宽度数据318的一半来计算车道偏移数据318。
55.车道宽度阈值确定模块304确定用于检测当前车道内的对象的路径内车道阈值数据320。例如,车道宽度阈值确定模块304接收实时车道宽度数据314、偏移数据318。车道宽度阈值确定模块304将偏移数据318应用于先前计算的路径内阈值(例如,通过从左阈值减去偏移值,然后将偏移值添加到右阈值)。然后,车道宽度阈值确定模块304基于滞后来限制阈值宽度阈值数据320。在各个实施例中,滞后是可校准的。
56.路径内对象确定模块306确定路径内对象并基于此生成对象追踪数据322。例如,路径内对象确定模块306接收车道宽度阈值数据320。路径内对象确定模块306将阈值应用于路径内确定逻辑,以用于被确定为在视场内的所有目标的路径内确定逻辑,以确定对象追踪数据322。
57.现在参考图4,并继续参考图1和3,示出了根据实施例的用于确定对象追踪数据的方法400。可以理解的是,根据本公开,方法400内的操作顺序不限于如图4所示的顺序执行,而是根据本公开内容,可以按照适用的一个或多个变化顺序来执行。在各个实施例中,可以在不改变方法400的精神的情况下去除或添加方法400的一个或多个步骤。
58.在一个示例中,该方法可以在405开始。在410确认车道信息的可用性。当车道信息可用于来自传感器系统和/或地图数据的当前位置时,该方法在420继续。否则,该方法在490处结束。
59.在420处,例如基于上述仲裁方法来选择当前位置的实时车道宽度。在430,基于更新的车道宽度来计算车道内阈值。
60.在440处获得从本车的中心到车道边缘的传感器测量的横向距离。此后,在450处基于此计算偏移率和偏移值。
61.在460处将偏移值应用于先前创建的路径内阈值(例如,通过从左侧减去偏移值并将偏移值添加至右侧)。然后在470处将路径内阈值限制为最小距离。
62.在480处,对于被确定为在视场内的所有目标,将路径内阈值应用于路径内确定逻辑。此后,该方法可以在490处结束。
63.尽管在前面的详细描述中已经提出了至少一个示例性实施例,但是应当理解,存在大量的变型。还应当理解,一个或多个示例性实施方式仅是示例,并且无意以任何方式限制本公开的范围,适用性或配置。相反,前述详细描述将为本领域技术人员提供用于实施一个或多个示例性实施方式的便利路线图。应当理解,在不脱离所附权利要求及其合法等同物所阐述的本公开的范围的情况下,可以对元件的功能和布置进行各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1