用于车辆自动远光灯辅助的主动前灯跟踪的制作方法
1.该技术领域通常涉及车辆领域,并且更具体地,涉及控制车辆中的自动远光灯功能。
背景技术:
2.如今,许多车辆的前灯都具有自动远光灯功能,例如,在各种情况下,车辆前灯的远光灯都是自动控制的。在这种车辆中,当检测到接近的车辆时,远光灯可以关闭。然而,在某些情况下,现有的前灯自动远光灯控制系统可能并不总是得到最佳控制的,例如,当在具有山坡或其他斜坡的道路上行驶时。
3.因此,希望提供用于控制车辆前灯的自动远光灯功能的改进的系统和方法。此外,结合附图和本发明的背景,本发明的其他期望的特征和特性将从本发明的后续详细描述和所附权利要求中变得明显。
技术实现要素:
4.在一个示例性实施例中,提供了一种用于控制车辆前灯的自动远光灯功能的方法,该方法包括:获取与车辆前方的对象相关的摄像机数据;经由处理器识别来自摄像机数据的感兴趣区域中的像素的径向梯度;以及基于径向梯度,经由处理器自动控制前灯的自动远光灯功能。
5.同样在示例性实施例中,该方法还包括:经由处理器计算来自摄像机数据的径向梯度的大小;其中自动控制包括基于径向梯度的大小,经由处理器自动控制前灯的自动远光灯功能。
6.同样在示例性实施例中,径向梯度大小的计算包括经由处理器计算来自摄像机数据的径向梯度中的像素数;并且自动控制包括当径向梯度中的像素数超过预定阈值时,经由处理器自动降低前灯的强度。
7.同样在示例性实施例中,该方法还包括:经由处理器计算来自摄像机数据的径向梯度的密度;其中自动控制包括基于径向梯度的密度,经由处理器自动控制前灯的自动远光灯功能。
8.同样在示例性实施例中,径向梯度的密度的计算包括经由处理器计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值;并且自动控制包括如果径向梯度中的最大阴影和最小阴影之间的差值超过预定阈值,则经由处理器自动降低前灯的强度。
9.同样在示例性实施例中,该方法还包括:经由处理器计算来自摄像机数据的径向梯度的大小;以及经由处理器计算来自摄像机数据的径向梯度的密度;其中自动控制包括基于径向梯度的大小和密度,经由处理器自动控制前灯的自动远光灯功能。
10.同样在示例性实施例中,径向梯度的大小的计算包括经由处理器计算来自摄像机数据的径向梯度中的像素数;径向梯度的密度的计算包括经由处理器计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值;并且所述自动控制包括基于像素数和来
自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值,经由处理器自动降低前灯的强度。
11.在另一个示例性实施例中,一种用于控制车辆前灯的自动远光灯功能的系统,该系统包括:摄像机,其被配置为提供与车辆前方的对象有关的摄像机数据;以及处理器,其联接到摄像机并被配置成至少促进:识别来自摄像机数据的识别感兴趣区域中的像素的径向梯度;以及基于径向梯度自动控制前灯的自动远光灯功能。
12.同样在示例性实施例中,处理器还被配置成至少促进:计算来自摄像机数据的径向梯度的大小;以及基于径向梯度的大小自动控制前灯的自动远光灯功能。
13.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的像素数来计算大小;以及当径向梯度中的像素数超过预定阈值时,自动降低前灯的强度。
14.同样在示例性实施例中,处理器还被配置成至少促进:计算来自摄像机数据的径向梯度的密度;以及基于径向梯度的密度,经由处理器自动控制前灯的自动远光灯功能。
15.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差来计算密度;以及如果径向梯度中的最大阴影和最小阴影之间的差值超过预定阈值,则自动降低前灯的强度。
16.同样在示例性实施例中,处理器还被配置成至少促进:计算来自摄像机数据的径向梯度的大小;计算来自摄像机数据的径向梯度的密度;并且基于径向梯度的大小和密度自动控制前灯的自动远光灯功能。
17.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的像素数来计算大小;通过计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值来计算密度;以及基于像素数和来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值,经由处理器自动降低前灯的强度。
18.在另一个示例性实施例中,提供了一种车辆,其包括:一个或多个具有自动远光灯功能的前灯;以及用于控制前灯的自动远光灯功能的控制系统,该控制系统包括:摄像机,其被配置为提供与车辆前方的对象相关的摄像机数据;以及处理器,其联接到摄像机并被配置成至少促进:识别来自摄像机数据的识别感兴趣区域中的像素的径向梯度;以及基于该径向梯度自动控制前灯的自动远光灯功能。
19.同样在示例性实施例中,处理器还被配置成至少促进:计算来自摄像机数据的径向梯度的大小;以及基于径向梯度的大小自动控制前灯的自动远光灯功能。
20.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的像素数来计算大小;以及当径向梯度中的像素数超过预定阈值时,自动降低前灯的强度。
21.同样在示例性实施例中,其中处理器还被配置成至少促进:计算来自摄像机数据的径向梯度的密度;以及基于径向梯度的密度,经由处理器自动控制前灯的自动远光灯功能。
22.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值来计算密度;如果径向梯度中的最大阴影和最小阴影之间的差值超过预定阈值,则自动降低前灯的强度
23.同样在示例性实施例中,处理器还被配置成至少促进:通过计算来自摄像机数据的径向梯度中的像素数,计算来自摄像机数据的径向梯度的大小;通过计算来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值,计算来自摄像机数据的径向梯度的密度;以及基于像素数和来自摄像机数据的径向梯度中的最大阴影和最小阴影之间的差值,经由处理器自动降低前灯的强度。
附图说明
24.下文将结合以下附图描述本公开,其中相同的附图标记表示相同的元件,并且在附图中:
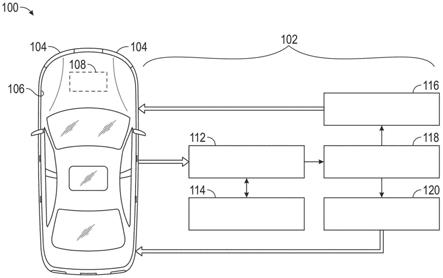
25.图1是根据示例性实施例的车辆的功能框图,该车辆包括车辆前灯和控制前灯的控制系统,该控制系统包括用于车辆前灯的自动远光灯功能;
26.图2是根据示例性实施例的用于控制车辆的前灯的控制系统的计算机系统的功能框图,所述控制系统包括用于控制自动远光灯功能,并且可以结合图1的控制系统来实施;
27.图3是根据示例性实施例的用于控制车辆的前灯的自动远光灯功能的过程的流程图,并且该过程可以结合图1的车辆、图1的控制系统和图2的计算机系统来实施;和
28.图4和图5是根据各种示例性实施例的与如在道路上与一个或多个其他车辆一起描绘的图1的车辆结合的图3的过程的实施方式的说明性示例的示意图。
具体实施方式
29.以下详细描述本质上仅仅是示例性的,并不旨在限制本公开或其应用和用途。此外,不打算受前面背景技术或下面详细描述中提出的任何理论的约束。
30.图1示出了根据示例性实施例的车辆100。如下文进一步更详细描述的,车辆100包括用于控制车辆100的前灯104的自动远光灯功能的控制系统102。如下文进一步更详细描述的,根据示例性实施例,控制系统102基于关于车辆100前方对象的感兴趣区域的摄像机数据中的径向梯度来控制前灯104的远光灯功能。
31.在某些实施例中,车辆100包括汽车。在各种实施例中,车辆100可以是多种不同类型的汽车中的任何一种,例如轿车、货车、卡车或运动型多功能车(suv),并且在某些实施例中可以是两轮驱动(2wd)(即后轮驱动或前轮驱动)、四轮驱动(4wd)或全轮驱动(awd),和/或各种其他类型的车辆。在某些实施例中,车辆100还可以包括摩托车和/或一种或多种其他类型的车辆。此外,在各种实施例中,还将理解,车辆100可以包括任何数量的其他类型的移动平台。
32.在所示实施例中,车辆100包括基本上封闭车辆100的其他部件的车身106。同样在所示实施例中,车辆100包括多个车轴和车轮(图1中未示出),这些车轴和车轮作为车辆100的驱动系统108的一部分或与其一起促进车辆100的运动。
33.在各种实施例中,驱动系统108包括推进系统。在某些示例性实施例中,驱动系统108包括内燃机和/或电动机/发电机。在某些实施例中,驱动系统108可以变化,和/或可以使用两个或更多个驱动系统108。举例来说,车辆100还可以结合多种不同类型的推进系统中的任何一种或其组合,例如汽油或柴油燃料的内燃机、“柔性燃料车辆”(ffv)发动机(即,使用汽油和酒精的混合物)、气体化合物(例如,氢气和/或天然气)燃料的发动机、燃烧/电
动机混合发动机和电动机。
34.如图1所示,在各种实施例中,控制系统102包括以下中的一个或多个:视觉系统(fom)112、仪表板组合仪表(ipc)116、车身控制模块(bcm)118和外部照明模块(elm)。在各种实施例中,视觉系统112获得车辆100的摄像机数据,识别并执行关于摄像机数据中与车辆100前方的对象相对应的感兴趣区域的径向梯度的计算(包括关于径向梯度的大小和密度的计算),并提供用于控制车辆100的前灯104的自动远光灯功能的指令。
35.在各种实施例中,视觉系统112经由机器视觉和图像处理114提供关于摄像机数据和其中识别的径向梯度的这些特征。此外,在各种实施例中,视觉系统112经由从视觉系统112通过车身控制模块118提供给联接到前灯104的外部照明模块120的指令来控制用于前灯104的自动远光灯功能。在各种实施例中,这些步骤在下面结合图3的过程300以及图4和图5的实施方式来进一步更详细地阐述。
36.同样在各种实施例中,车身控制模块118还经由提供给外部照明模块120的指令使用其他数据、计算和要求来控制前灯104的自动远光灯功能,例如使用其他数据,例如车速以及来自仪表板组合仪表116的用户输入(例如用户指令和/或超控)。
37.关于图2,根据示例性实施例,提供了用于控制系统200的功能框图,该控制系统200控制用于车辆的前灯的自动远光灯功能。在各种实施例中,控制系统200对应于图1的车辆100的控制系统102和/或其部件。在某些实施例中,控制系统200和/或其部件是图1的视觉系统112的一部分。在某些实施例中,控制系统200和/或其部件可以是视觉系统112、仪表板组合仪表116、车身控制模块118和/或外部照明模块120中的一个或多个的一部分和/或与其联接。此外,尽管图2描绘了具有传感器阵列202(具有摄像机212和其他传感器)和计算机系统204(具有处理器222、存储器224和其他部件)的控制系统200,并且尽管一个实施例中的控制系统200至少部分地对应于图1的视觉系统112,但是应当理解,在各种实施例中,视觉系统112、仪表组116、车身控制模块118,和外部照明模块120中的每个可以包括与如在图2中所阐述和/或如下所述的相同或相似的部件,例如包括各自的传感器和/或各自的处理器和存储器等。
38.如图2所示,在各种实施例中,控制系统200包括传感器阵列202和控制器204。在各种实施例中,传感器阵列202包括一个或多个摄像机212。在各种实施例中,一个或多个摄像机212面向车辆100的前方,例如为了检测车辆100前方的道路或路径上或附近的对象。同样在某些实施例中,传感器阵列202还可以包括一个或多个其他类型的检测传感器2014(例如,在一些实施例中包括雷达、激光雷达、声纳等)、一个或多个车辆速度传感器216(例如,车轮速度传感器、加速度计和/或用于测量数据以确定车辆100的速度的其他传感器)、和/或一个或多个其他传感器218(例如,在某些实施例中,用户输入传感器、gps传感器等)。
39.同样如图2所示,控制器联接到传感器阵列202。在各种实施例中,控制器204基于来自摄像机212的与车辆前方(例如,沿着车辆前方的路径或道路)的一个或多个检测到的对象有关的摄像机数据的识别出的径向许可来控制车辆前灯的自动远光灯功能,如下面结合图3的过程300以及图4和图5的实施方式进一步更详细地阐述的。如图2所示,在各种实施例中,控制器204包括计算机系统,该计算机系统包括处理器222、存储器224、接口、存储设备228、总线230和磁盘236。
40.如图2所示,控制器204包括计算机系统。在某些实施例中,控制器204还可以包括
传感器阵列202和/或一个或多个其他车辆部件。此外,应当理解,控制器204可以以其他方式不同于图2所示的实施例。例如,控制器204可以联接到或者可以以其他方式利用一个或多个远程计算机系统和/或其他控制系统,例如作为一个或多个上述车辆设备和系统的一部分。
41.在所示实施例中,控制器204的计算机系统包括处理器222、存储器224、接口226、存储设备228和总线230。处理器222执行控制器204的计算和控制功能,并且可以包括任何类型的处理器或多个处理器、诸如微处理器的单个集成电路、或者任何合适数量的集成电路设备和/或电路板,它们协同工作以实现处理单元的功能。在操作期间,处理器222执行包含在存储器224中的一个或多个程序232,并且因此控制控制器204和控制器204的计算机系统的一般操作,通常是在执行这里描述的过程中,例如下面结合图2进一步讨论的过程300。
42.存储器224可以是任何类型的合适的存储器。例如,存储器224可以包括诸如sdram的各种类型的动态随机存取存储器(dram),各种类型的静态ram(sram)以及各种类型的非易失性存储器(prom、eprom和闪存)。在某些示例中,存储器224与处理器222位于同一计算机芯片上和/或共同位于同一计算机芯片上。在所描绘的实施例中,存储器224存储上述程序232以及一个或多个存储的值234(例如,在各种实施例中,包括用于控制自动远光灯功能的预定阈值)。
43.总线230用于在控制器204的计算机系统的各种部件之间传输程序、数据、状态和其他信息或信号。接口226允许例如从系统驱动器和/或另一个计算机系统到控制器204的计算机系统的通信,并且可以使用任何合适的方法和装置来实施。在一个实施例中,接口226从传感器阵列202、驱动系统108、悬架系统106和/或车辆100的一个或多个其他部件和/或系统获得各种数据。接口226可以包括一个或多个网络接口,以与其他系统或部件通信。接口226还可以包括一个或多个网络接口以与技术人员通信,和/或一个或多个存储接口以连接到存储装置,例如存储设备228。
44.存储设备228可以是任何合适类型的存储装置,包括各种不同类型的直接存取存储装置和/或其他存储设备。在一个示例性实施例中,存储设备228包括程序产品,存储器224可以从该程序产品接收程序232,该程序232执行本公开的一个或多个过程的一个或多个实施例,例如下面结合图2进一步讨论的过程300的步骤。在另一示例性实施例中,程序产品可以直接存储在存储器224和/或一个或多个其他磁盘236和/或其他存储设备中和/或以其他方式被其访问。
45.总线230可以是连接计算机系统和部件的任何合适的物理或逻辑器件。这包括但不限于直接硬连线连接、光纤、红外和无线总线技术。在操作期间,程序232存储在存储器224中,并由处理器222执行。
46.应当理解,虽然在全功能计算机系统的上下文中描述了该示例性实施例,但是本领域技术人员将认识到,本公开的机制能够作为具有一种或多种类型的非暂时性计算机可读信号承载介质的程序产品来分发,所述非暂时性计算机可读信号承载介质用于存储程序及其指令并执行其分发,例如承载该程序并包含存储在其中的计算机指令的非暂时性计算机可读介质,所述计算机指令用于使计算机处理器(例如处理器222)实施和执行该程序。这种程序产品可以采取多种形式,并且无论用于执行分发的计算机可读信号承载介质的具体类型如何,本公开同样适用。信号承载介质的例子包括:可记录介质,如软盘、硬盘、存储卡
和光盘,以及传输介质,如数字和模拟通信链路。应当理解,在某些实施例中也可以利用基于云的存储和/或其他技术。类似地,可以理解,控制器204的计算机系统也可以另外不同于图2所示的实施例,例如,控制器204的计算机系统可以联接到或者可以以其他方式利用一个或多个远程计算机系统和/或其他控制系统。
47.图3是根据示例性实施例的用于控制车辆前灯的远光灯功能的过程300的流程图。在各种实施例中,过程300可以结合图1的车辆100来实施,包括其控制系统102,并且包括图2的控制系统200(和/或其部件)。根据各种示例性实施例,过程300还在下面结合图4和图5进一步描述,图4和图5提供了结合图1的车辆100的图3的过程300的实施方式的说明性示例,如在车辆100前方具有其他车辆的道路上所描绘的。
48.如图3所示,在各种实施例中,过程300开始于302处。在各种实施例中,当一个或多个事件发生以指示车辆驾驶正在发生或将要发生时,例如驾驶员、操作员或乘客进入车辆100、车辆100的发动机或电动机被开启、车辆100的变速器被置于“驱动(drive)”模式等,过程300开始。
49.在303处收集传感器数据。在各种实施例中,从图2的一个或多个摄像机212获得摄像机数据,包括在车辆100前方(即,在车辆100行驶的方向上)具有路径或道路以及其中或其附近的任何检测到的对象的图像的摄像机数据。在某些实施例中,还可以从图2的传感器阵列202的一个或多个其他传感器获得额外的传感器数据,例如包括来自其他检测传感器214的其他类型的传感器数据,以识别车辆100前方的对象(例如,使用雷达、激光雷达、声纳等)和/或车辆速度(例如,经由一个或多个速度传感器216和/或其他车辆数据)。
50.在各种实施例中,在304处,从摄像机数据获得图像帧。在各种实施例中,每个图像帧对应于特定时间点处车辆100前方区域的摄像机数据。
51.同样在各种实施例中,在306处使用传感器数据校准水平视场(hfov)和垂直视场(vfov)。在各种实施例中,hfov和vfov由图2的处理器222使用传感器数据303来校准。同样在各种实施例中,308中的感兴趣区域(roi)只能在hfov和vfov的精确校准之后被精确识别。
52.在各种实施例中,在308处识别感兴趣区域。在各种实施例中,感兴趣区域(roi)由图2的处理器222基于水平和垂直视野从车辆100前方(例如,在车辆100前方的路径或道路上或附近)的检测对象周围的摄像机数据识别为帧的区域。在各种实施例中,进一步的处理然后被限制在图像帧的这个特定区域。
53.在310处,为图像帧识别径向梯度。在各种实施例中,图2的处理器222将感兴趣区域308内的径向梯度识别为图像帧的感兴趣区域内通过多级亮度到暗度的过渡区域(或者反之亦然)。在各种实施例中,经由处理器222扫描感兴趣区域的像素,以便识别梯度。
54.例如,参考图4,提供了第一实施方式,示出了包括沿着车辆100前方的道路(图4中未示出)的被检测对象的第一图像帧400。如图4所示,第一图像帧400包括围绕检测到的对象(即,检测到的迎面而来的车辆)的前灯的径向梯度402。如图4所示,在该示例中,径向梯度402从中心404延伸到外缘406。同样如图4所示,径向梯度402例示了中心404中的最亮区域、外缘406中的最暗区域和各种不同的阴影(例如,不同的灰色阴影)之间的过渡,这些阴影各自从中心404到外缘406逐渐变暗。
55.返回参考图3,在各种实施例中,在312处计算并监控径向梯度的大小。在各种实施
例中,径向梯度的大小包括梯度中和/或其中的分量区域中的像素数的计数。例如,在一个实施例中,径向梯度的大小包括从中心404到外缘406的单个外拐角的像素计数(例如,对应于径向梯度402的半径)。作为附加示例,在某些其他实施例中,径向梯度的大小包括遍及外缘406的整个表面(例如,对应于径向梯度402的区域)的像素计数。
56.同样在各种实施例中,在314处计算并监控径向梯度的密度。在各种实施例中,径向梯度的密度包括径向梯度中的最小和最大阴影之间的差值。
57.在各种实施例中,在316处确定关于径向梯度的大小是否大于预定阈值。在各种实施例中,图2的处理器222进行确定关于如在312处计数的径向梯度中的像素数是否超过预定阈值。在各种实施例中,阈值也是包括半径计数和面积计数的可校准查找表。同样在各种实施例中,如果确定径向梯度的大小大于预定阈值,则过程进行到步骤320,如下文进一步描述的。同样在各种实施例中,否则该过程前进到上述步骤310。
58.在各种实施例中,在318处进行确定关于径向梯度的密度是否大于预定阈值。在各种实施例中,图2的处理器222进行确定如在314处确定的径向梯度中的像素的像素数的最小和最大色调之间的差值是否超过预定阈值。在各种实施例中,密度阈值也是包括密度计数的指数/线性/对数增加的可校准查找表。在各种实施例中,如果确定径向梯度的密度大于预定阈值,则过程进行到步骤320,如下文进一步描述的。同样在各种实施例中,否则该过程前进到上述步骤310。
59.关于步骤316和318,在某些实施例中,如果径向梯度的大小和密度都超过它们各自的阈值,则过程进行到步骤320(否则返回到步骤310)。相反,在某些其他实施例中,如果大小或密度或两者都大于它们各自的预定阈值,则过程进行到步骤320(否则返回到步骤310)。
60.在步骤320期间,分配梯度指数。在各种实施例中,图2的处理器222分配表示径向梯度的地理位置的索引值。此外,在某些实施例中,在322处,尤其是通过图2的处理器222提供的指令(例如,经由视觉系统112通过车身控制模块118传输到图1的外部照明模块120的指令),降低前灯的自动远光灯的强度。此外,同样在某些实施例中,过程进行到步骤323,如下所述的。
61.在步骤322期间,对径向坡度内的可能前灯进行扫描,并且进行确定关于是否已经在径向坡度中识别出另一车辆的前灯。在某些实施例中,步骤322包括由图2的处理器222做出的关于摄像机数据的更仔细检查(即,在未来帧中,当检测到的对象更靠近车辆100时)是否揭示另一车辆的前灯确实由径向梯度表示的确定。
62.例如,关于图5,提供了第二图像帧500,其在时间上在图4的第一图像帧400之后。如图5所示,当检测到的对象靠近图1的车辆100时,随后的(第二)图像帧500揭示在第二图像帧中存在来自另一车辆100的两个前灯502。在各种实施例中,这用作另一车辆正在接近图1的车辆100的初始确定(基于径向梯度)的确认。
63.返回参考图3,在各种实施例中,如果确定没有发现另一车辆的前灯被表示在径向梯度内,则在324处,车辆100的前灯104的自动远光灯功能被打开(或重新打开)。在各种实施例中,过程然后返回到304。
64.相反,在各种实施例中,如果确定发现另一车辆的前灯被表示在径向坡度内,则该过程在326处开始跟踪另一车辆(例如,经由处理器222向图2的传感器阵列202提供的指
令),并且在328处由图2的处理器222提供的指令关闭自动远光灯(例如,经由视觉系统112通过车身控制模块118传输到图1的外部照明模块120)
65.同样在各种实施例中,在330处,为其他车辆的前灯分配前灯指数(例如,关于其地理位置),并且在332处,基于物理车辆的地理位置,为其他车辆的前灯提供从图像区域计算的二维坐标。此外,在各种实施例中,在334处,使用固有值将二维坐标转换成纬度和经度值。
66.在某些实施例中,自动远光灯在336处被部分关闭。例如,在某些实施例中,面向图5的附加车辆的某些远光灯可以在336处关闭,而不面向图5的附加车辆的其他远光灯可以在336处保持远光灯模式。在各种实施例中,这种指令经由图2的处理器222提供(例如,经由视觉系统112通过车身控制模块118传输到图1的外部照明模块120)。此外,在某些实施例中,在步骤326的各种迭代中继续跟踪附加车辆,直到附加车辆不再出现在摄像机数据图像帧中,之后该过程返回到关于新对象的检测的步骤304。
67.因此,提供了用于控制车辆前灯的自动(或自动的)远光灯功能的方法、系统和车辆。在各种实施例中,摄像机数据用于检测和检查来自图1的车辆100前方的被检测车辆的前灯的摄像机图像中的径向梯度,用于控制自动远光灯功能。在各种实施例中,当径向梯度指示另一车辆存在于车辆100前方时,自动远光灯被减少或关闭,从而减少另一车辆的眩光。通过使用径向梯度,所公开的过程、系统和车辆可以潜在地提供对正在接近的车辆的早期检测,特别是在有山坡和/或斜坡道路的情况下,从而进一步最小化对正在接近的车辆的驾驶员的眩光。
68.应当理解,系统、车辆、应用和实施方式可以不同于附图中描绘的和本文描述的那些。例如,在各种实施例中,车辆100、控制系统102、其部件和/或其他部件可以不同于图1中描绘的和/或以上结合其描述的那些。还将理解,图2的控制系统200的部件在各种实施例中可以不同。还应当理解,过程300的步骤可以不同,和/或其各种步骤可以同时于和/或以不同于图3和/或上面描述的顺序来执行。还将理解,过程300的实施可以不同于图4和/或图5和/或如上所述的那些。
69.虽然在前面的详细描述中已经给出了至少一个示例性实施例,但是应当理解,存在大量的变化。还应当理解,一个或多个示例性实施例仅是示例,并不旨在以任何方式限制本公开的范围、适用性或配置。相反,前面的详细描述将为本领域技术人员提供实施一个或多个示例性实施例的便利路线图。应当理解,在不脱离所附权利要求及其合法等同物中阐述的本公开的范围的情况下,可以对元件的功能和布置进行各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1