在自动驾驶中使用其他道路使用者对自我交通工具行为的反应的方法和系统与流程
背景技术:
1、当自动交通工具(av)控制系统决定在环境中如何移动交通工具以及往何处移动交通工具时,具有挑战性的问题是如何规划av和环境中其他参与者之间可能的交互。考虑其他参与者的经典方法是预测其他参与者规划采取的轨迹。然后,在运动规划中,av规划通过将这些轨迹视为硬障碍来避开它们。
2、然而,将其他参与者的未来行为视为在所有情况下都要避免的硬边界并不理想,因为这会导致av避免其他参与者实际上不会到达的空间和时间中的位置。其还可能导致av未能考虑参与者的其他行为,诸如参与者可能如何对av的行为做出反应。
3、本文档描述了旨在解决上述问题和/或其他问题的方法和系统。
技术实现思路
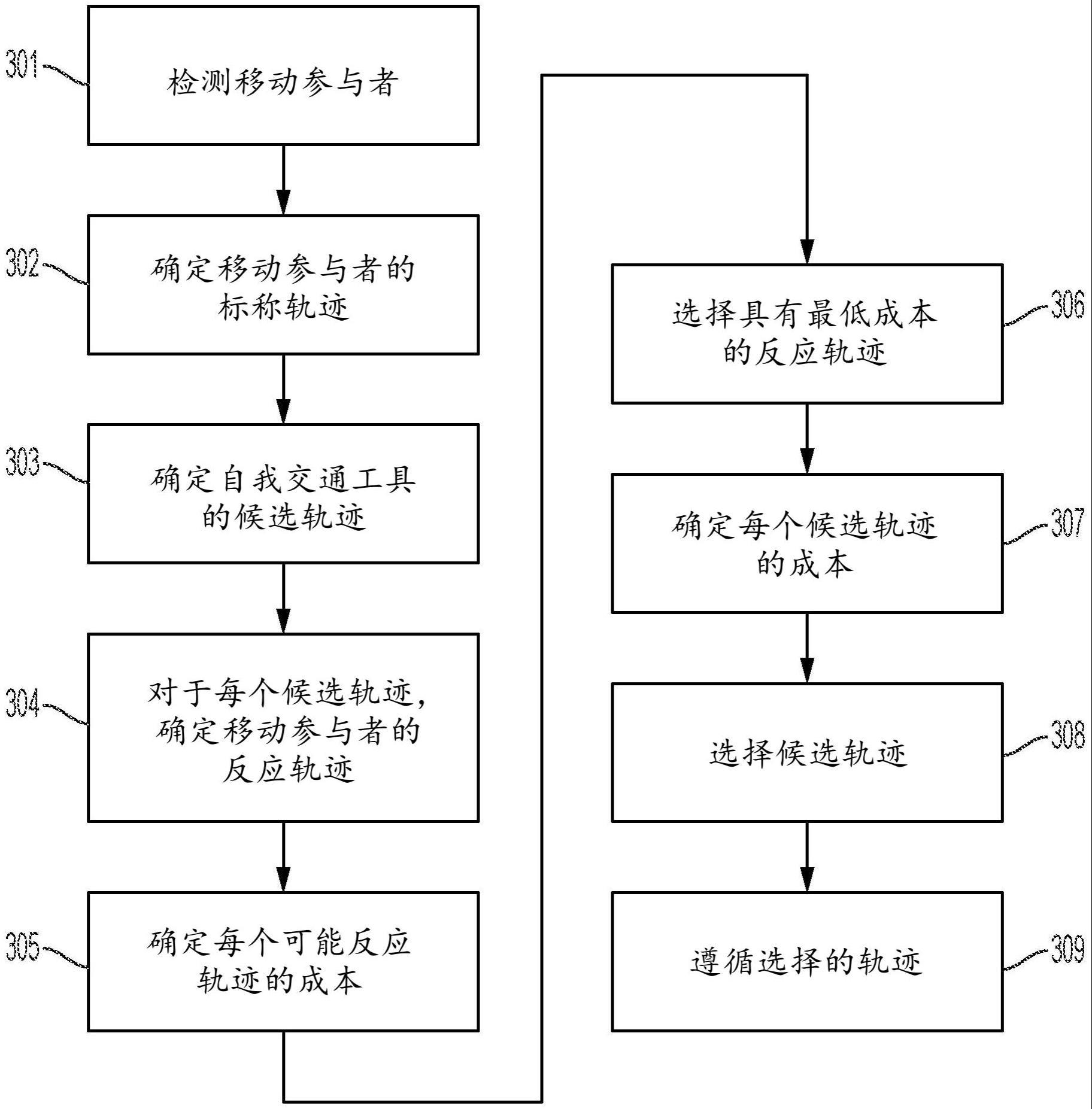
1、在各种实施例中,公开了一种确定自动交通工具的轨迹的方法。为了实施该方法,自我交通工具的存在检测系统可以在自我交通工具在环境中移动时检测环境中移动参与者的存在。自我交通工具的运动规划系统、自我交通工具的另一系统或外部系统可以识别自我交通工具的各种候选轨迹。对于自我交通工具的每个候选轨迹,系统可以确定:(i)移动参与者响应于自我交通工具的候选轨迹而预期遵循的反应轨迹;(ii)反应轨迹的移动参与者的成本,以及(iii)候选轨迹的候选轨迹成本。候选轨迹成本将是候选轨迹的移动参与者的成本和一个或多个自我中心因素的函数。系统将使用候选轨迹的候选轨迹成本来选择候选轨迹之一,经由该候选轨迹之一来移动自我交通工具。然后,自我交通工具的自动交通工具系统可以沿着所选择的轨迹在环境中移动自我交通工具。
2、可选地,使用候选轨迹的候选轨迹成本来选择候选轨迹之一可以包括选择具有最低候选轨迹成本的候选轨迹。可选地,使用候选轨迹的候选轨迹成本来选择候选轨迹之一包括从候选轨迹中选择对移动参与者具有最低成本的轨迹。
3、可选地,系统还可以确定标称轨迹预测,该标称轨迹预测包括移动参与者响应于自我交通工具的过去行为将预期遵循的标称轨迹。
4、在各种实施例中,移动参与者的成本可以是反应轨迹与标称轨迹的偏差的函数。此外或可替代地,移动参与者的成本可以是以下任一项或两项的函数:(i)与反应轨迹相关联的控制行为的严重性;或(ii)反应轨迹将有多接近候选轨迹。
5、可选地,确定移动参与者响应于自我交通工具的候选轨迹而预期遵循的反应轨迹可以包括:(i)确定移动参与者响应于候选轨迹可以遵循的可能反应轨迹;(ii)确定每个可能反应轨迹的反应轨迹成本;以及(iii)选择具有最低反应轨迹成本的可能反应轨迹作为移动参与者预期遵循的反应轨迹。
6、上述方法可以由包含编程指令的处理器和存储器来实施。包括这种指令的计算机程序产品也在本文档中进行了描述。
技术特征:
1.一种确定自动交通工具的轨迹的方法,所述方法包括:
2.根据权利要求1所述的方法,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一包括选择具有最低候选轨迹成本的候选轨迹。
3.根据权利要求1所述的方法,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一包括从所述候选轨迹中选择对所述移动参与者具有最低成本的轨迹。
4.根据权利要求1所述的方法,还包括:
5.根据权利要求1所述的方法,其中所述移动参与者的所述成本是以下任一项或两者的函数:
6.根据权利要求1所述的方法,其中确定所述移动参与者响应于所述自我交通工具的所述候选轨迹而预期遵循的所述反应轨迹包括:
7.根据权利要求1所述的方法,其中确定所述候选轨迹的所述候选轨迹成本是由所述自我交通工具的运动规划系统执行的。
8.根据权利要求1所述的方法,其中确定所述候选轨迹的所述候选轨迹成本是由与所述自我交通工具通信的外部系统执行的。
9.一种用于确定自动交通工具的轨迹的系统,所述系统包括:
10.根据权利要求9所述的系统,还包括所述自我交通工具的自动交通工具系统,其中所述自动交通工具系统被配置为使所述自我交通工具沿着所选择的轨迹移动。
11.根据权利要求9所述的系统,其中所述存在检测系统包括以下的一个或多个:相机或lidar系统。
12.根据权利要求9所述的系统,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一的所述指令包括选择具有最低候选轨迹成本的候选轨迹的指令。
13.根据权利要求1所述的方法,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一的指令包括从所述候选轨迹中选择对所述移动参与者具有最低成本的轨迹的指令。
14.根据权利要求9所述的系统,还包括附加指令,所述附加指令被配置为使所述处理器:
15.根据权利要求9所述的系统,其中所述移动参与者的所述成本是以下任一项或两者的函数:
16.根据权利要求9所述的系统,其中确定所述移动参与者响应于所述自我交通工具的所述候选轨迹而预期遵循的所述反应轨迹的所述指令包括进行以下操作的指令:
17.根据权利要求9所述的系统,其中所述处理器是所述自我交通工具的运动规划系统的组件。
18.根据权利要求9所述的系统,其中所述处理器是与所述自我交通工具通信的外部系统的组件。
19.一种确定自动交通工具的轨迹的方法,所述方法包括:
20.根据权利要求19所述的方法,其中所述移动参与者的所述成本是以下任一项或两者的函数:
21.一种用于确定自动交通工具的轨迹的计算机程序产品,所述计算机程序产品包括存储器,所述存储器包含编程指令,所述编程指令被配置为使处理器:
22.根据权利要求21所述的计算机程序产品,还包括被配置为使自动交通工具系统沿着所选择的轨迹移动的附加编程指令。
23.根据权利要求21所述的计算机程序产品,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一的所述指令包括选择具有最低候选轨迹成本的候选轨迹的指令。
24.根据权利要求21所述的计算机程序产品,其中使用所述候选轨迹的所述候选轨迹成本来选择所述候选轨迹之一的指令包括从所述候选轨迹中选择对所述移动参与者具有最低成本的轨迹的指令。
25.根据权利要求21所述的计算机程序产品,还包括附加编程指令,所述附加编程指令被配置为使所述处理器:
26.根据权利要求21所述的计算机程序产品,其中确定所述移动参与者响应于所述自我交通工具的所述候选轨迹而预期遵循的所述反应轨迹的所述指令包括进行以下操作的指令:
技术总结
公开了一种确定自动交通工具的轨迹的方法。自我交通工具可以检测环境中移动参与者。为了在自我交通工具的候选轨迹之间进行选择,系统将考虑每个候选轨迹对移动参与者的成本。系统将使用候选轨迹的候选轨迹成本来选择候选轨迹之一,经由该候选轨迹之一来移动自我交通工具。然后,自我交通工具的自动交通工具系统可以沿着所选择的轨迹在环境中移动自我交通工具。
技术研发人员:C·坎宁安,N·西格米勒,M·奥利斯,A·T·哈特尼特,G·P·K·卡尔,C·萨夫琴科
受保护的技术使用者:埃尔构人工智能有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!