一种水田用两轮驱动纯电动无人牵引车
1.本发明属于农业智能机械技术领域,特别涉及一种水田用两轮驱动纯电动无人牵引车。
背景技术:
2.随着智能化科技革命的深入推进,在人工智能的快速发展和车辆行业的需求下促使无人驾驶技术也得到高速发展。低速特定用途的无人驾驶车辆,可以应用于景区、园区、厂区、矿区等特定场合,例如无人驾驶观光车、无人驾驶清扫车、无人驾驶物料配送车、无人驾驶巡逻车、无人驾驶机场摆渡车等,具有广阔的应用前景。发展农用机械设备的智能化水平具有重要的意义,水田农用机械设备的智能化应用具有较大的价值。以水稻为主的农作物生长在水田里,而在水田里进行劳作与旱田相比具有很大的困难,通常劳动者要长时间在水里站立和行走,劳动者容易疲劳还不能方便的就地休息。
技术实现要素:
3.针对上述存在的问题,本发明的目的是提供一种水田用两轮驱动纯电动无人牵引车。
4.本发明的技术方案是:一种水田用两轮驱动纯电动无人牵引车,包括:
5.车架;
6.两个水田车轮,分别通过转向驱动桥连接在所述车架下方,两个水田车轮与转向驱动桥连接处分别设有轮毂电机,所述转向驱动桥上端通过轴端滑动轴承与所述车架底面连接;
7.伸缩支撑轮,设置在所述车架底部,且与两个所述水田车轮呈等腰三角形设置;
8.箱体,罩设在所述车架上,箱体内设有电控单元集成模块和动力电池箱,所述轮毂电机与所述电控单元集成模块连接;
9.钩销式牵引座,设置在所述车架尾端,与农机设备连接。
10.进一步地,所述电控单元集成模块包括无人驾驶模块,所述无人驾驶模块包括感知层、决策层和控制层。
11.进一步地,其特征在于,所述感知层包括环境感知单元和车辆位姿单元,
12.所述环境感知单元包括设置在所述箱体顶部的两个多线激光雷达、设置在箱体前端的两个单线激光雷达、设置在箱体前部左右两侧的两个毫米波雷达和设置在箱体前端的定焦摄像头;
13.所述车辆位姿单元包括设置在所述箱体内部的惯性传感器和设置在箱体顶部左右两侧的两个差分gps天线。
14.进一步地,所述决策层根据感知层的实时监测信息融合结果创建高精地图数据,利用微型计算机存储器内的深度学习算法在cpu和gpu内进行目的地全局和局部的路径规划计算,以及牵引车启动、车道保持、紧急停车、避障和停车等牵引车运动行为的预测计算,
完成对牵引车的路径规划和行为决策,并生成控制指令,路径规划包括牵引车轨迹和速度的规划。
15.进一步地,所述控制层用于把所述决策层发出的控制指令转化为控制信号发送至轮毂电机,轮毂电机分别根据电控单元集成模块发出的控制信号调整两个轮毂电机的转速和转向,用于牵引车的前进、后退、转弯和停止运动的控制。
16.进一步地,所述钩销式牵引座上未连接农机设备时,所述伸缩支撑轮的伸缩杆伸长,一个伸缩支撑轮和两个水田车轮共同对车架进行支撑,并且可以实现牵引车在无牵引对象时的自主运动;当钩销式牵引座与农机设备连接后,伸缩支撑轮的伸缩杆收缩,伸缩支撑轮可以脱离地面,两个水田车轮和农机设备的支撑轮共同支撑车架和农机设备。
17.进一步地,所述电控单元集成模块通过无线通讯模块连接有用户监测终端,所述用户监测终端具有遥控功能,用于指挥牵引车在水田里按照作业要求行驶,遥控指令通过无线通信模块传递给牵引车的电控单元集成模块,无线通信模块还用于将牵引车的环境感知数据、位姿数据、图像数据发送到用户监测终端进行备份和远程监控。
18.进一步地,所述的用户监测终端可以选择台式电脑、笔记本电脑、平板电脑或手机,用户监测终端通过无线通信模块收集牵引车各传感器数据信息,实时查看牵引车外场景和位姿信息,必要时遥控驱动牵引车行驶。
19.进一步地,还包括设置在所述箱体的后端的操作面板,所述操作面板包括液晶触摸屏及操作软件,可以通过液晶触摸屏启动自检及初始化、查看自检及初始化信息、显示剩余电量信息、设置高精度地图库信息、输入目的地信息并让牵引车开始执行和停止的功能。
20.进一步地,还包括:
21.急停按钮,设置在所述箱体的顶部,且与所述轮毂电机连接,用于紧急情况下控制轮毂电机紧急制动;
22.报警灯,设置在所述箱体的顶部,且与所述电控单元集成模块和动力电池箱连接,用于在发生故障或剩余电量不足时发出警告;
23.触碰开关,设置在所述车架前端,且与所述电控单元集成模块连接,用于牵引车前端发生碰撞时控制牵引车紧急停车和开启所述报警灯;
24.充电口,设置在所述箱体的后端,且与所述动力电池箱连接,用于给动力电池箱充电;
25.电源按钮,设置在所述操作面板旁,连接在动力电池箱的输出端,用于牵引车的通电和断电。
26.本发明的工作原理:首先建立水田工作环境的高精地图,建立高精地图时可以不需要被牵引对象,将水田用两轮驱动纯电动无人牵引车的伸缩支撑轮的伸缩杆伸展,使得支撑轮起到支撑作用,将牵引车停放在水田起始位置;用启动钥匙开启牵引车电源,在操作面板上开启牵引车自检和初始化,自检各模块均正常;对各传感器进行联合标定,使得各传感器的综合误差满足使用要求;利用用户监测终端工具软件遥控接收器控制牵引车从初始位置向目的地运动,遥控接收器接收到指令后,经过电控单元集成模块转化为电控信号,电控信号通过纯电动驱动模块控制左右两侧的轮毂电机的转速和转向,按照遥控操作者的控制意愿向目的地运动,同时牵引车的各传感器采集水田环境数据和牵引车位姿信息,包括高精度的牵引车运动轨迹、激光雷达点云和摄像头的图像等;将采集到的所有传感器数据
和信息通过g宽带通信模块发送到用户监测终端,然后在用户监测终端利用深度学习算法进行多传感器数据融合,对数据中的对象进行识别和标注,建立水田高精度地图;对首次建立的高精度地图进行实车测试和误差分析,如果误差大于阈值,需要再经过人工检查并修改标注,直到修正后的高精度地图达到后期使用的精度要求,存储在无人驾驶模块的高精度地图数据库;建立高精度地图的流程如图所示;
27.牵引车工作,将牵引车自带的钩销式牵引座和被牵引的水稻播种机的牵引销连接后,牵引车在前,播种机在后,停放在水田起始位置,如图所示;开启牵引车电源,在操作面板上开启牵引车自检和初始化,自检各模块均正常获得牵引车初始位姿信息;选择或输入高精地图和目的地后,系统读入并加载由起始位置到目的地的高精地图,自动规划牵引车的路径;
28.完成路径规划后,牵引车带动水稻播种机按规划的速度开始出发,同时感知层中各传感器采集数据进行信息融合,感知获得牵引车的外部环境和车辆位姿,将当前跟踪的轨迹与高精度地图中规划路径的路点信息对比,通过决策层计算,实时进行车道保持、避障、紧急停车和停车等行为预测,然后对牵引车轨迹和速度进行规划,形成控制指令,通过电控单元集成模块发送指令来控制纯电动驱动模块的轮毂电机进行牵引车的转向、加速和制动,最终牵引车到达目的地,结束牵引任务;
29.牵引车从初始位置到目的地位置的过程中,路径全程由电控单元集成模块控制完成;如果遇到突发的不能自动规避的碰撞情况,可以由布置于牵引车前端的触碰开关紧急停车并打开报警灯进行紧急停车信号报警;如果遇到电池电量下降到阈值时,报警灯将进行低电量信号报警;当遇到不能完成从起始位置到目的地位置的完整的运动过程,比如碰撞停车或电量用完等情况,牵引车将自动进行断点位置信息记忆,等待排除问题后可以从断点位置处继续完成之前未完成的运动轨迹;还有,在牵引车自动工作过程中,不论是否发生意外情况,管理员都可以利用遥控手柄通过牵引车上的遥控接收器发送人工控制指令控制牵引车,使其摆脱突发的意外情况。
30.与现有技术相比,本发明的有益效果在于:本发明提供的种水田用两轮驱动纯电动无人牵引车,可以为水田里的农机设备提供无人牵引,实现农机设备高效和安全的工作。包括通过牵引车多种传感器的实时信息采集和无线通信,结合用户监测终端软硬件可以实现数据存储、信息融合、环境感知、位姿确定、行为预测和路径规划等的计算和处理。建立水田高精地图,实现牵引车自动避障、紧急停车和报警等无人驾驶功能;通过轮式支撑装置可以实现牵引车自行平稳移动;通过牵引装置可以方便的连接不同的被牵引农机设备;通过纯电动驱动模块,可以实现高效和稳定的动力供给。
附图说明
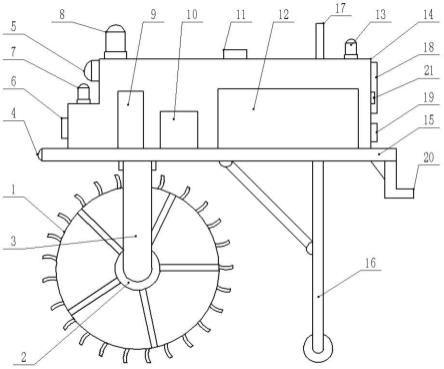
31.图1为本发明的整体结构侧视图;
32.图2是本发明的无人驾驶模块架构图;
33.图3是本发明建立水田高精度地图的流程图;
34.图4是本发明牵引车牵引农机设备示意图。
35.其中,1-水田车轮、2-轮毂电机、3-转向驱动桥、4-触碰开关、5-摄像头、6
‑ꢀ
毫米波雷达、7-单线激光雷达、8-多线激光雷达、9-惯性测量单元、10-电控单元集成模块、11-急停
按钮、12-动力电池箱、13-报警灯、14-箱体、15-车架、16-伸缩支撑轮、17-差分gps天线、18-操作面板、19-充电口、20-牵引座、21-电源按钮。
具体实施方式
36.下面结合附图,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
37.实施例:如图1所示,一种水田用两轮驱动纯电动无人牵引车,包括车架15、两个水田车轮1、伸缩支撑轮16、箱体14和钩销式牵引座20。其中,
38.两个水田车轮1分别通过转向驱动桥3连接在车架15下方,两个水田车轮1与转向驱动桥3连接处分别设有轮毂电机2,转向驱动桥3上端通过轴端滑动轴承与车架15底面连接;
39.伸缩支撑轮16设置在车架15底部,且与两个水田车轮1呈等腰三角形设置;
40.箱体14罩设在车架15上,箱体14内设有电控单元集成模块10和动力电池箱12,轮毂电机2与电控单元集成模块10连接,电控单元集成模块10包括无人驾驶模块,如图2所示,无人驾驶模块包括感知层、决策层和控制层,感知层包括环境感知单元和车辆位姿单元,环境感知单元包括设置在箱体14 顶部的两个多线激光雷达8、设置在箱体14前端的两个单线激光雷达7、设置在箱体14前部左右两侧的两个毫米波雷达6和设置在箱体14前端的定焦摄像头5;车辆位姿单元包括设置在箱体14内部的惯性传感器9和设置在箱体14 顶部左右两侧的两个差分gps天线17,决策层根据感知层的实时监测信息融合结果创建高精地图数据,利用微型计算机存储器内的深度学习算法在cpu 和gpu内进行目的地全局和局部的路径规划计算,以及牵引车启动、车道保持、紧急停车、避障和停车等牵引车运动行为的预测计算,完成对牵引车的路径规划和行为决策,并生成控制指令,路径规划包括牵引车轨迹和速度的规划,控制层用于把决策层发出的控制指令转化为控制信号发送至轮毂电机2,轮毂电机2分别根据电控单元集成模块10发出的控制信号调整两个轮毂电机 2的转速和转向,用于牵引车的前进、后退、转弯和停止运动的控制,电控单元集成模块10通过无线通讯模块连接有用户监测终端,用户监测终端具有遥控功能,用于指挥牵引车在水田里按照作业要求行驶,遥控指令通过无线通信模块传递给牵引车的电控单元集成模块10,无线通信模块还用于将牵引车的环境感知数据、位姿数据、图像数据发送到用户监测终端进行备份和远程监控,用户监测终端可以选择台式电脑、笔记本电脑、平板电脑或手机,用户监测终端通过无线通信模块收集牵引车各传感器数据信息,实时查看牵引车外场景和位姿信息,必要时遥控驱动牵引车行驶;
41.钩销式牵引座20设置在车架15尾端,与农机设备连接,钩销式牵引座 20上未连接农机设备时,伸缩支撑轮16的伸缩杆伸长,一个伸缩支撑轮16 和两个水田车轮1共同对车架15进行支撑,并且可以实现牵引车在无牵引对象时的自主运动;当钩销式牵引座20与农机设备连接后,伸缩支撑轮16的伸缩杆收缩,伸缩支撑轮16可以脱离地面,两个水田车轮1和农机设备的支撑轮共同支撑车架15和农机设备。
42.一种水田用两轮驱动纯电动无人牵引车,还包括:
43.设置在箱体14的后端的操作面板18,操作面板18包括液晶触摸屏及操作软件,可以通过液晶触摸屏启动自检及初始化、查看自检及初始化信息、显示剩余电量信息、设置高
精度地图库信息、输入目的地信息并让牵引车开始执行和停止的功能;
44.急停按钮11,设置在箱体14的顶部,且与轮毂电机2连接,用于紧急情况下控制轮毂电机2紧急制动;
45.报警灯13,设置在箱体14的顶部,且与电控单元集成模块10和动力电池箱12连接,用于在发生故障或剩余电量不足时发出警告;
46.触碰开关4,设置在车架15前端,且与电控单元集成模块10连接,用于牵引车前端发生碰撞时控制牵引车紧急停车和开启报警灯13;
47.充电口19,设置在箱体14的后端,且与动力电池箱12连接,用于给动力电池箱12充电;
48.电源按钮21,设置在操作面板18旁,连接在动力电池箱12的输出端,用于牵引车的通电和断电。
49.上述实施例的工作原理:首先建立水田工作环境的高精地图,建立高精地图时可以不需要被牵引对象,将水田用两轮驱动纯电动无人牵引车的伸缩支撑轮16的伸缩杆伸展,使得支撑轮起到支撑作用,将牵引车停放在水田起始位置;用启动钥匙开启牵引车电源,在操作面板18上开启牵引车自检和初始化,自检各模块均正常;对各传感器进行联合标定,使得各传感器的综合误差满足使用要求;利用用户监测终端工具软件遥控接收器控制牵引车从初始位置向目的地运动,遥控接收器接收到指令后,经过电控单元集成模块10 转化为电控信号,电控信号通过纯电动驱动模块控制左右两侧的轮毂电机2 的转速和转向,按照遥控操作者的控制意愿向目的地运动,同时牵引车的各传感器采集水田环境数据和牵引车位姿信息,包括高精度的牵引车运动轨迹、激光雷达点云和摄像头的图像等;将采集到的所有传感器数据和信息通过5g 宽带通信模块发送到用户监测终端,然后在用户监测终端利用深度学习算法进行多传感器数据融合,对数据中的对象进行识别和标注,建立水田高精度地图;对首次建立的高精度地图进行实车测试和误差分析,如果误差大于阈值,需要再经过人工检查并修改标注,直到修正后的高精度地图达到后期使用的精度要求,存储在无人驾驶模块的高精度地图数据库;建立高精度地图的流程如图3所示;
50.牵引车工作,将牵引车自带的钩销式牵引座20和被牵引的水稻播种机的牵引销连接后,牵引车在前,播种机在后,停放在水田起始位置,如图4所示;开启牵引车电源,在操作面板18上开启牵引车自检和初始化,自检各模块均正常获得牵引车初始位姿信息;选择或输入高精地图和目的地后,系统读入并加载由起始位置到目的地的高精地图,自动规划牵引车的路径;
51.完成路径规划后,牵引车带动水稻播种机按规划的速度开始出发,同时感知层中各传感器采集数据进行信息融合,感知获得牵引车的外部环境和车辆位姿,将当前跟踪的轨迹与高精度地图中规划路径的路点信息对比,通过决策层计算,实时进行车道保持、避障、紧急停车和停车等行为预测,然后对牵引车轨迹和速度进行规划,形成控制指令,通过电控单元集成模块10发送指令来控制纯电动驱动模块的轮毂电机进行牵引车的转向、加速和制动,最终牵引车到达目的地,结束牵引任务;
52.牵引车从初始位置到目的地位置的过程中,路径全程由电控单元集成模块10控制完成;如果遇到突发的不能自动规避的碰撞情况,可以由布置于牵引车前端的触碰开关4紧急停车并打开报警灯13进行紧急停车信号报警;如果遇到电池电量下降到阈值时,报警灯
13将进行低电量信号报警;当遇到不能完成从起始位置到目的地位置的完整的运动过程,比如碰撞停车或电量用完等情况,牵引车将自动进行断点位置信息记忆,等待排除问题后可以从断点位置处继续完成之前未完成的运动轨迹;还有,在牵引车自动工作过程中,不论是否发生意外情况,管理员都可以利用遥控手柄通过牵引车上的遥控接收器发送人工控制指令控制牵引车,使其摆脱突发的意外情况。
53.上述电子元件的具体型号未作特殊指定,均可以选用市售的普通产品,只要能够满足本发明的使用需求即可。
54.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1