一种智能化商用车充换电站用人机交换控制装置的制作方法
1.本实用新型涉及充换电站技术领域,具体为一种智能化商用车充换电站用人机交换控制装置。
背景技术:
2.与传统汽车相比,电动汽车在行驶过程中可实现零排放,且噪音低,行驶成本远低于传统汽车,电动汽车主要以电为动力来源,因此电动汽车上装在蓄电池,为了加快电动汽车蓄电池的更换效率,提升人们出行方便,现有一种智能化商用车充换电站用人机交换控制装置,驾驶员将车开进充换电站的车库位置,该充换电站将自行对电动汽车进行更换蓄电池。
3.为了进一步提高更换蓄电池的效率,驾驶员通过充换电站车库位置内设置的车辆停车人机交互控制器可实现付款、问题解答等多项功能,现有的人机交互控制器为液晶触控式的,控制器安装在车库出口侧,由于控制器离驾驶员距离较远,因此驾驶员必须头伸出去才能看清控制器,同时由于控制器安装在车库内侧,车子在驶出车库时容易剐蹭到控制器,其次现有的控制器无保护罩,长期风吹日晒会降低控制器的使用寿命,为此,本实用新型提出一种智能化商用车充换电站用人机交换控制装置用于解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种智能化商用车充换电站用人机交换控制装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种智能化商用车充换电站用人机交换控制装置,包括底板,底板上设置动力电池系统模块,动力电池系统模块上方设置架空层,架空层上方设置智能换机器人及控制模块,智能换机器人及控制模块下方设置监控室模块,监控室模块上设置攀爬梯,监控室模块与动力电池系统模块之间设置待机库,待机库一侧设置具有收放及开合功能的人机交互控制器,人机交互控制器内设置清洁机构;
6.人机交互控制器包括支座,支座设置两组,两组支座均固定在监控室模块上,两组支座之间设置丝杠,丝杠两侧对称设置两组滑杆,丝杠螺接丝杠套,滑杆滑动连接滑套,丝杠套连接翻转机构,翻转机构连接控制器,控制器上盖板机构。
7.优选的,翻转机构包括延伸板,延伸板一端固定连接两组滑套,延伸板另一端对称设置两组支撑板,两组支撑板之间设置控制器,支撑板一侧设置限位条,控制器一侧设置推杆,推杆上套设弹簧,控制器铰接连杆,连杆两端对称设置两组轴一,轴一两端对称设置两组轴承,一组轴承嵌入滑套,另一组轴承嵌入控制器上设置的板二。
8.优选的,控制器包括控制器外壳,控制器外壳内置内腔,内腔内放置控制器面板,控制器外壳一侧设置两组支板,控制器外壳另一侧设置下盒体,支板上设置通孔,通孔内设置直立轴承,直立轴承滑动连接推杆,控制器外壳一端对称设置两组销轴,销轴一端设置轴承,轴承嵌入支撑板。
9.优选的,盖板机构包括盖板主体,盖板主体两侧对称连接两组支撑轴,一组支撑轴一端连接锥形齿轮,锥形齿轮设置两组,两组锥形齿轮啮合,另一组锥形齿轮中部连接传动轴,传动轴一端连接齿轮一,齿轮一啮合齿条一,齿条一一端固定连接推杆。
10.优选的,清洁机构包括矩形板,矩形板上套设海绵套,矩形板滑动连接两组承接杆,两组承接杆一端均固定连接滑块,滑块滑动连接导轨,导轨固定连接控制器外壳内壁,两组承接杆另一端均连接动力机构,海绵套固定连接矩形板,矩形板内对称设置两组导向滑孔,导向滑孔滑动连接承接杆,海绵套滑动连接控制器面板。
11.优选的,动力机构包括螺杆,螺杆螺接螺套,螺套上对称连接两组承接块,承接块一侧固定连接承接杆,螺套上设置齿轮二,齿轮二中部连接轴二,齿轮二啮合齿条二,齿条二固定在下盒体内壁上,齿轮二一侧设置拉杆,拉杆一端设置杆一,杆一一端固定连接矩形板。
12.优选的,丝杠两端设置两组轴承,轴承嵌入支座,滑杆固定在两组支座之间,滑套内置导向孔,导向孔内置直立轴承,直立轴承滑动连接滑杆。
13.优选的,盖板主体位于内腔端口部,支撑轴一端设置轴承一,轴承一嵌入控制器外壳,传动轴上设置轴承二,轴承嵌入控制器外壳上设置板三。
14.优选的,螺杆两端设置两组轴承三,轴承三嵌入下盒体,轴二一端设置轴承四,轴承四嵌入螺套,拉杆两端对称设置两组轴四,轴四一端设置轴承,一组轴承嵌入齿轮二偏离轴心一侧,另一组轴承嵌入杆一。
15.与现有技术相比,本实用新型的有益效果是:
16.1.丝杠的转动使丝杠套移动,丝杠套通过连杆推动控制器,使控制器产生翻转力,控制器在翻转时,推杆将挤压延伸板,同时推杆上固定板将挤压弹簧,由于弹簧的弹性作用,使控制器容易带动延伸板先移动,延伸板带动滑套沿着滑杆移动,直至滑套受到一组支座限位,此时丝杠套继续移动,使推杆挤压延伸板的挤压力变大,同时推杆上固定板压缩弹簧,推杆沿着支板的通孔滑动,使控制器不断的翻转,直至控制器一端与限位条贴平,使控制器与监控室模块垂直,因此当驾驶员需要使用控制器时,由于通过延伸板带动控制器向前延伸一段距离,从而使控制器距离驾驶员位置非常近,从而使驾驶员不用起身就能使用,方便驾驶员使用,其次当收回控制器,由于控制器翻转到监控室模块一侧,使控制器不位于待机库内侧,从而避免车子行进时剐蹭到控制器,对控制器的起到保护作用;
17.2.推杆将推动齿条一移动,齿条一的移动使齿轮一转动,齿轮一通过传动轴使锥形齿轮转动,锥形齿轮通过另一组锥形齿轮使一组支撑轴转动,支撑轴带动盖板主体翻转,因此当控制器被推送到驾驶员面前时,盖板主体将控制器外壳打开,使驾驶员能够操作控制器面板,同时在控制器收回时,盖板主体将控制器外壳关闭,使灰尘及雨水无法进入到控制器外壳内,从而避免控制器面板受到风吹日晒,不仅对控制器面板起到保护作用,同时提高控制器面板的使用寿命。
18.3.螺杆的转动使螺套贴着下盒体内壁移动,螺套通过两组承接块使两组承接杆移动,两组承接杆通过矩形板使海绵套贴着控制器面板表面横向移动,海绵套的移动与控制器面板表面产生摩擦力,从而将控制器面板表面的灰尘及脏污去除,保证控制器面板表面的清洁,同时海绵套将控制器面板表面粘附的水汽吸收,其次螺套将同时带动齿轮二,齿轮二将沿着齿条二转动,齿轮二通过拉杆,使杆一带动矩形板沿着两组承接杆来回移动,使海
绵套在控制器面板表面纵向来回移动,从而增大海绵套对控制器面板表面的摩擦力度,使控制器面板表面被海绵套清洁的更加干净。
附图说明
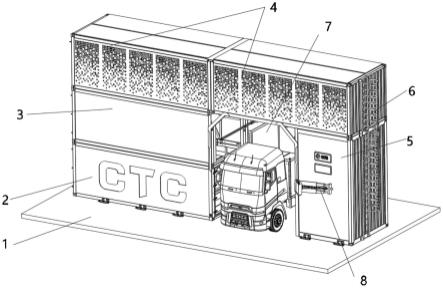
19.图1为本实用新型结构示意图;
20.图2为本实用新型结构人机交互控制器示意图;
21.图3为本实用新型结构翻转机构示意图;
22.图4为图3中a处放大图;
23.图5为本实用新型结构控制器、清洁机构组合示意图;
24.图6为图5中b处放大图;
25.图7为本实用新型结构矩形板、海绵套、承接杆、杆一、承接块组合图。
26.图中:1、底板;2、动力电池系统模块;3、架空层;4、智能换机器人及控制模块;5、监控室模块;6、攀爬梯;7、待机库;8、人机交互控制器;9、清洁机构;801、支座;802、滑杆;803、丝杠;804、丝杠套;805、翻转机构;806、滑套;807、控制器;808、盖板机构;8051、延伸板;8052、支撑板;8053、限位条;8054、推杆;8055、弹簧;8056、连杆;8071、控制器外壳;8072、内腔;8073、控制器面板;8074、下盒体;8075、支板;8081、盖板主体;8082、齿条一;8083、支撑轴;8084、锥形齿轮;8085、齿轮一;8086、传动轴;901、矩形板;902、海绵套;903、承接杆;904、滑块;905、导轨;906、动力机构;9061、螺杆;9062、螺套;9063、承接块;9064、齿轮二;9065、轴二;9066、齿条二;9067、拉杆;9068、杆一。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.请参阅图1至图7,本实用新型提供一种技术方案:一种智能化商用车充换电站用人机交换控制装置,包括底板1,底板1上设置动力电池系统模块2,动力电池系统模块2上方设置架空层3,架空层3上方设置智能换机器人及控制模块4,智能换机器人及控制模块4下方设置监控室模块5,监控室模块5上设置攀爬梯6,监控室模块5与动力电池系统模块2之间设置待机库7,待机库7一侧设置具有收放及开合功能的人机交互控制器8,人机交互控制器8内设置清洁机构9,人机交互控制器8包括支座801,支座801设置两组,两组支座801均固定在监控室模块5上,两组支座801之间设置丝杠803,丝杠803两侧对称设置两组滑杆802,丝杠803螺接丝杠套804,滑杆802滑动连接滑套806,丝杠套804连接翻转机构805,翻转机构805连接控制器807,控制器807上盖板机构808,翻转机构805包括延伸板8051,延伸板8051一端固定连接两组滑套806,延伸板8051另一端对称设置两组支撑板8052,两组支撑板8052之间设置控制器807,支撑板8052一侧设置限位条8053,控制器807一侧设置推杆8054,推杆8054上套设弹簧8055,控制器807铰接连杆8056,连杆8056两端对称设置两组轴一,轴一两端对称设置两组轴承,一组轴承嵌入滑套806,另一组轴承嵌入控制器807上设置的板二,丝杠803两端设置两组轴承,轴承嵌入支座801,滑杆802固定在两组支座801之间,滑套806内
置导向孔,导向孔内置直立轴承,直立轴承滑动连接滑杆802,其中丝杠803通过电机驱动,当驾驶员将车子开进待机库7时,电机驱动丝杠803转动,丝杠803的转动使丝杠套804移动,丝杠套804通过连杆8056推动控制器807,使控制器807产生翻转力,控制器807在翻转时,推杆8054将挤压延伸板8051,同时推杆8054上固定板将挤压弹簧8055,由于弹簧8055的弹性作用,使控制器807容易带动延伸板8051先移动,延伸板8051带动滑套806沿着滑杆802移动,直至滑套806受到一组支座801限位,此时丝杠套804继续移动,使推杆8054挤压延伸板8051的挤压力变大,同时推杆8054上固定板压缩弹簧8055,推杆8054沿着支板8075的通孔滑动,使控制器807不断的翻转,直至控制器807一端与限位条8053贴平,使控制器807与监控室模块5垂直,因此当驾驶员需要使用控制器807时,由于通过延伸板8051带动控制器807向前延伸一段距离,从而使控制器807距离驾驶员位置非常近,从而使驾驶员不用起身就能使用,方便驾驶员使用,其次当收回控制器807,由于控制器807翻转到监控室模块5一侧,使控制器807不位于待机库7内侧,从而避免车子行进时剐蹭到控制器807,对控制器807的起到保护作用;
29.控制器807包括控制器外壳8071,控制器外壳8071内置内腔8072,内腔8072内放置控制器面板8073,控制器外壳8071一侧设置两组支板8075,控制器外壳8071另一侧设置下盒体8074,支板8075上设置通孔,通孔内设置直立轴承,直立轴承滑动连接推杆8054,控制器外壳8071一端对称设置两组销轴,销轴一端设置轴承,轴承嵌入支撑板8052,盖板机构808包括盖板主体8081,盖板主体8081两侧对称连接两组支撑轴8083,一组支撑轴8083一端连接锥形齿轮8084,锥形齿轮8084设置两组,两组锥形齿轮8084啮合,另一组锥形齿轮8084中部连接传动轴8086,传动轴8086一端连接齿轮一8085,齿轮一8085啮合齿条一8082,齿条一8082一端固定连接推杆8054,盖板主体8081位于内腔8072端口部,支撑轴8083一端设置轴承一,轴承一嵌入控制器外壳8071,传动轴8086上设置轴承二,轴承嵌入控制器外壳8071上设置板三,其中当推杆8054上固定板压缩弹簧8055时,推杆8054将推动齿条一8082移动,齿条一8082的移动使齿轮一8085转动,齿轮一8085通过传动轴8086使锥形齿轮8084转动,锥形齿轮8084通过另一组锥形齿轮8084使一组支撑轴8083转动,支撑轴8083带动盖板主体8081翻转,因此当控制器807被推送到驾驶员面前时,盖板主体8081将控制器外壳8071打开,使驾驶员能够操作控制器面板8073,同时在控制器807收回时,盖板主体8081将控制器外壳8071关闭,使灰尘及雨水无法进入到控制器外壳8071内,从而避免控制器面板8073受到风吹日晒,不仅对控制器面板8073起到保护作用,同时提高控制器面板8073的使用寿命;
30.清洁机构9包括矩形板901,矩形板901上套设海绵套902,矩形板901滑动连接两组承接杆903,两组承接杆903一端均固定连接滑块904,滑块904滑动连接导轨905,导轨905固定连接控制器外壳8071内壁,两组承接杆903另一端均连接动力机构906,海绵套902固定连接矩形板901,矩形板901内对称设置两组导向滑孔,导向滑孔滑动连接承接杆903,海绵套902滑动连接控制器面板8073,动力机构906包括螺杆9061,螺杆9061螺接螺套9062,螺套9062上对称连接两组承接块9063,承接块9063一侧固定连接承接杆903,螺套9062上设置齿轮二9064,齿轮二9064中部连接轴二9065,齿轮二9064啮合齿条二9066,齿条二9066固定在下盒体8074内壁上,齿轮二9064一侧设置拉杆9067,拉杆9067一端设置杆一9068,杆一9068一端固定连接矩形板901,螺杆9061两端设置两组轴承三,轴承三嵌入下盒体8074,轴二9065一端设置轴承四,轴承四嵌入螺套9062,拉杆9067两端对称设置两组轴四,轴四一端设
置轴承,一组轴承嵌入齿轮二9064偏离轴心一侧,另一组轴承嵌入杆一9068,其中螺杆9061通过电机驱动,当控制器面板8073使用完毕后,电机驱动螺杆9061转动,螺杆9061的转动使螺套9062贴着下盒体8074内壁移动,螺套9062通过两组承接块9063使两组承接杆903移动,两组承接杆903通过矩形板901使海绵套902贴着控制器面板8073表面横向移动,海绵套902的移动与控制器面板8073表面产生摩擦力,从而将控制器面板8073表面的灰尘及脏污去除,保证控制器面板8073表面的清洁,同时海绵套902将控制器面板8073表面粘附的水汽吸收,其次螺套9062将同时带动齿轮二9064,齿轮二9064将沿着齿条二9066转动,齿轮二9064通过拉杆9067,使杆一9068带动矩形板901沿着两组承接杆903来回移动,使海绵套902在控制器面板8073表面纵向来回移动,从而增大海绵套902对控制器面板8073表面的摩擦力度,使控制器面板8073表面被海绵套902清洁的更加干净。
31.工作原理:使用过程中,当驾驶员将车子开进待机库7时,电机驱动丝杠803转动,丝杠803的转动使丝杠套804移动,丝杠套804通过连杆8056推动控制器807,使控制器807产生翻转力,控制器807在翻转时,推杆8054将挤压延伸板8051,同时推杆8054上固定板将挤压弹簧8055,由于弹簧8055的弹性作用,使控制器807容易带动延伸板8051先移动,延伸板8051带动滑套806沿着滑杆802移动,直至滑套806受到一组支座801限位,此时丝杠套804继续移动,使推杆8054挤压延伸板8051的挤压力变大,同时推杆8054上固定板压缩弹簧8055,推杆8054沿着支板8075的通孔滑动,使控制器807不断的翻转,直至控制器807一端与限位条8053贴平,推杆8054将推动齿条一8082移动,齿条一8082的移动使齿轮一8085转动,齿轮一8085通过传动轴8086使锥形齿轮8084转动,锥形齿轮8084通过另一组锥形齿轮8084使一组支撑轴8083转动,支撑轴8083带动盖板主体8081翻转,使盖板主体8081将控制器外壳8071打开,当控制器面板8073使用完毕后,电机驱动螺杆9061转动,螺杆9061的转动使螺套9062贴着下盒体8074内壁移动,螺套9062通过两组承接块9063使两组承接杆903移动,两组承接杆903通过矩形板901使海绵套902贴着控制器面板8073表面横向移动,同时螺套9062将同时带动齿轮二9064,齿轮二9064将沿着齿条二9066转动,齿轮二9064通过拉杆9067,使杆一9068带动矩形板901沿着两组承接杆903来回移动,使海绵套902在控制器面板8073表面纵向来回移动。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1