泊车车位角点碰撞检测方法、系统、电子设备及存储介质与流程
本发明涉及自动泊车领域,更具体地,涉及一种泊车车位角点碰撞检测方法、系统、电子设备及存储介质。
背景技术:
1、自动泊车辅助系统是通过视觉和超声波雷达融合的感知方案来识别车位和障碍物信息,通过规控和执行机构完成车辆自动泊入、泊出的系统。四路通道的摄像头将图像输入到自动泊车辅助系统控制器(apa),由图像拼接算法完成环视图像拼接,通过感知算法在拼接完成的图像上完成车位、障碍物、轮档、地锁等目标识别,超声波雷达可以通过测距完成障碍物与车辆的相对距离和空间车位识别,最终由融合模块完成融合车位信息和障碍物信息输出到规控模块,由规控模块完成路径规划和横纵向控制,最终控制车辆执行器完成整个泊车动作。
2、确定了感知目标车位后局部路径规划的质量和效率直接影响了整个泊车的性能。现有技术中针对泊车局部规划角点避障的方式有很多,一般都是以车辆后轴中心为质点做直线、圆弧或者样条曲线规划,其中车位角点作为规划的过程点进行绕行,由于未考虑车辆本身的尺寸信息,因此,虽然障碍物角点作为样条曲线的控制点在轨迹规划的时候进行了避让,但不保证车辆轮廓也能避开这些角点,在实际进行泊车过程中可能发生碰撞或者频繁触发重新规划来进行过程避障,从而增加泊车揉库次数,用户体验下降。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种泊车车位角点碰撞检测方法、系统、电子设备及存储介质。
2、根据本发明的第一方面,提供了一种自动泊车的车位角点碰撞检测方法,包括:
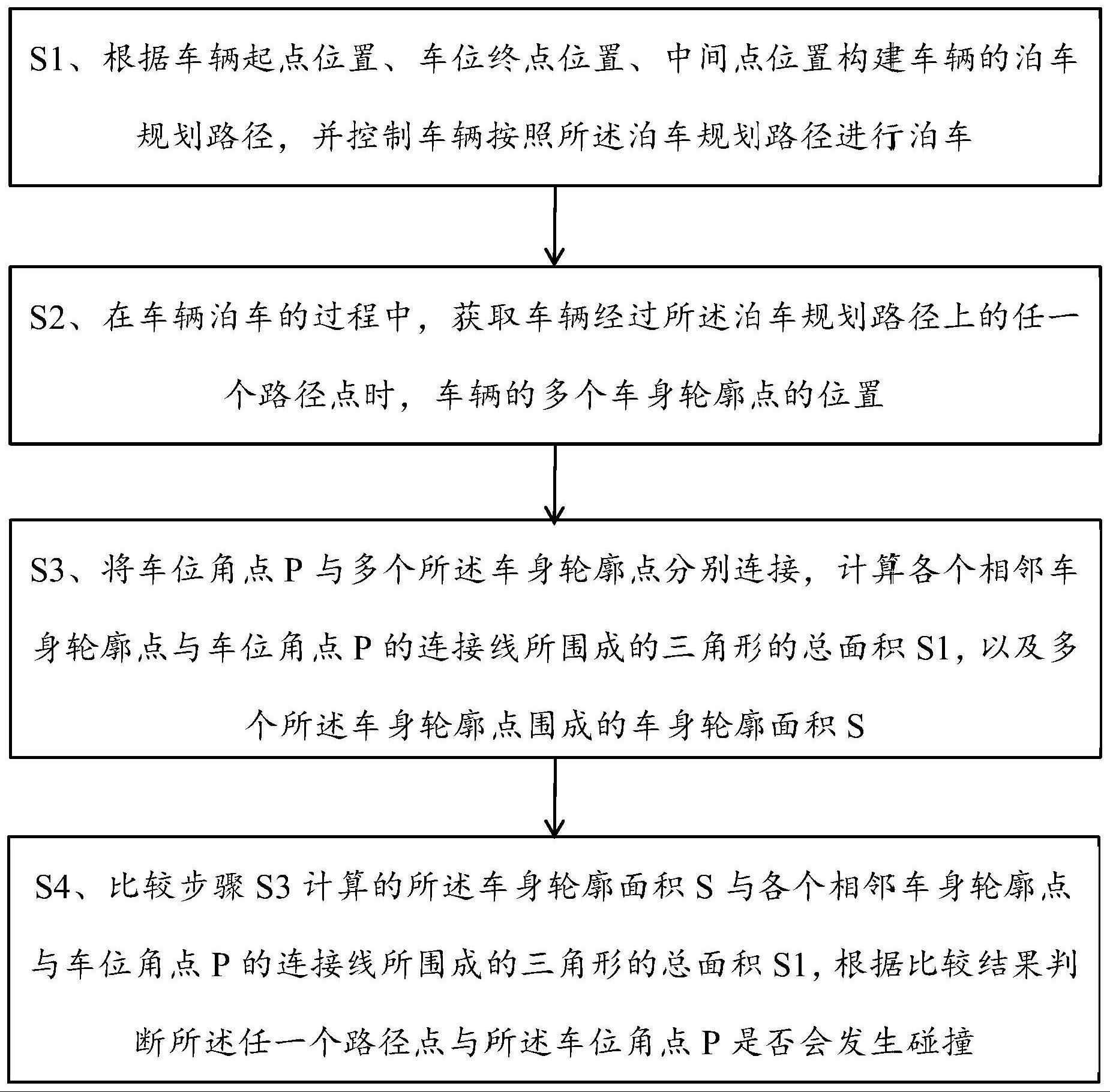
3、s1、根据车辆起点位置、车位终点位置、中间点位置构建车辆的泊车规划路径,并控制车辆按照所述泊车规划路径进行泊车;
4、s2、在车辆泊车的过程中,获取车辆经过所述泊车规划路径上的任一个路径点时,车辆的多个车身轮廓点的位置;
5、s3、将车位角点p与多个所述车身轮廓点分别连接,计算各个相邻车身轮廓点与车位角点p的连接线所围成的三角形的总面积s1,以及多个所述车身轮廓点围成的车身轮廓面积s;
6、s4、比较步骤s3计算的所述车身轮廓面积s与各个相邻车身轮廓点与车位角点p的连接线所围成的三角形的总面积s1,根据比较结果判断所述任一个路径点与所述车位角点p是否会发生碰撞。
7、在上述技术方案的基础上,本发明还可以作出如下改进。
8、优选的,在步骤s4之后还包括:
9、s5、对于所述泊车规划路径上会发生碰撞的路径点,调整所述路径点对应的末端航向角;
10、s6、获取调整后的不存在与所述车位角点p碰撞的路径点的泊车规划路径,并按照调整后的泊车规划路径控制车辆进行泊车动作。
11、优选的,步骤s5具体包括:
12、设定末端航向角调整范围,在所述末端航向角调整范围内按照从小到大递增的方式对所述路径点对应的末端航向角进行调整,根据调整后的末端航向角重新泊车规划路径。
13、优选的,步骤s2中多个所述车身轮廓点构成矩形形状的车身,多个所述车身轮廓点包括车辆四个角点a、b、c和d。
14、优选的,步骤s3中所述总面积s1的计算方法为:将所述车位角点p分别与所述车身轮廓的所述四个角点a、b、c、d连接,各个相邻角点ab、bc、cd、da与车位角点p构成四个三角形δpab、δpbc、δpcd、δpda,计算所述四个三角形δpab、δpbc、δpcd、δpda的面积和,即为所述面积s1。
15、优选的,步骤s1中所述中间点位置至少包括车位角点位置。
16、优选的,步骤s4中根据比较结果判断所述任一个路径点与所述车位角点p是否会发生碰撞,包括:
17、当s1>s时,判定为所述任一个路径点与所述车位角点p不会发生碰撞,否则,判定所述任一个路径点与所述车位角点p会发生碰撞。
18、根据本发明的第二方面,提供一种泊车车位角点碰撞检测系统,包括:规划路径获取模块、位置获取模块,计算模块、判断模块;其中
19、所述规划路径获取模块,根据车辆起点位置、车位终点位置、中间点位置构建车辆的泊车规划路径,并控制车辆按照所述泊车规划路径进行泊车;
20、所述位置获取模块,用于在车辆泊车的过程中,获取车辆经过所述泊车规划路径上的任一个路径点时,车辆的多个车身轮廓点的位置;
21、所述计算模块,用于将车位角点p与多个所述车身轮廓点分别连接,计算各个相邻车身轮廓点与车位角点p的连接线所围成的三角形的总面积s1,以及多个所述车身轮廓点围成的车身轮廓面积s;
22、所述判断模块,用于比较步骤s3计算的所述车身轮廓面积s与各个相邻车身轮廓点与车位角点p的连接线所围成的三角形的总面积s1,根据比较结果判断所述任一个路径点与所述车位角点p是否会发生碰撞。
23、根据本发明的第三方面,提供了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现上述的一种泊车的车位角点碰撞检测方法的步骤。
24、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现上述的一种泊车的车位角点碰撞检测方法的步骤。
25、根据本发明的第五方面,提供了一种汽车,其包括上述的一种泊车车位角点碰撞检测系统。
26、本发明提供的一种自动泊车车位角点碰撞检测方法、系统、电子设备、存储介质及汽车,在规划完成的路径中增加碰撞预演检测,通过遍历可能的路径点与车位角点形成的区域面积来判断车辆按规划路径行驶时是否会发生碰撞,能有效的剔除失败的规划路径,减少泊车过程揉库次数,提升泊车效率,具体的,本申请具有如下优点:
27、(1)在规划完成的曲线上做二次过滤,根据车身几何模型估算车辆轮廓并对曲线上的轨迹点逐个进行碰撞检测,并提出了具体的检测方法;
28、(2)舍弃轨迹点中出现可能碰撞点的轨迹,重新规划路径,为了能规划出不重复的曲线,本发明通过调整目标点航向角,并对新生产的曲线再做碰撞检测,直到得到符合要求的轨迹。
29、(3)为了减少车辆泊入目标点后车辆调整航向角产生的揉库次数,本发明在碰撞检测失败重新规划时限定合理的目标点航向角调整范围,并按照航向角从小到大的顺序进行重新规划,从而可以找到距离目标代价最小的点。
技术特征:
1.一种泊车车位角点碰撞检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种泊车车位角点碰撞检测方法,其特征在于,在步骤s4之后还包括:
3.根据权利要求2所述的一种泊车车位角点碰撞检测方法,其特征在于,步骤s5具体包括:
4.根据权利要求1所述的一种泊车车位角点碰撞检测方法,其特征在于,步骤s2中多个所述车身轮廓点构成矩形形状的车身,多个所述车身轮廓点包括车辆四个角点a、b、c和d。
5.根据权利要求4所述的一种泊车车位角点碰撞检测方法,其特征在于,步骤s3中所述总面积s1的计算方法为:将所述车位角点p分别与所述车身轮廓的所述四个角点a、b、c、d连接,各个相邻角点ab、bc、cd、da与车位角点p构成四个三角形δpab、δpbc、δpcd、δpda,计算所述四个三角形δpab、δpbc、δpcd、δpda的面积和,即为所述面积s1。
6.根据权利要求1所述的一种泊车车位角点碰撞检测方法,其特征在于,步骤s1中所述中间点位置至少包括车位角点位置。
7.根据权利要求1所述的一种泊车车位角点碰撞检测方法,其特征在于,所述步骤s4中根据比较结果判断所述任一个路径点与所述车位角点p是否会发生碰撞,包括:
8.一种泊车车位角点碰撞检测系统,其特征在于,包括规划路径获取模块、位置获取模块,计算模块和判断模块;
9.一种电子设备,其特征在于,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现如权利要求1-7任一项所述的一种泊车车位角点碰撞检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现如权利要求1-7任一项所述的一种泊车车位角点碰撞检测方法的步骤。
技术总结
本发明提供一种自动泊车的车位角点碰撞检测方法、系统、电子设备、存储介质及汽车,检测方法包括:控制车辆按照泊车规划路径进行泊车,计算车辆位于泊车规划路径上任一规划点时,各个相邻车身轮廓点与车位角点P的连接线所围成的三角形的总面积S1,以及多个车身轮廓点围成的车身轮廓面积S,通过比较面积S1和面积S的差值,来判断在泊车过程中是否会发生车辆与车位角点的碰撞,对于可能发生碰撞的规划点,调整其对应的末端航相机,从而避免泊车时车位内角点与车身发生碰撞,本发明在调整规划点的末端航向角时,按照从小到大递增的方式进行调整,以找到距离目标代价最小的点,形成最优的泊车规划路径,减少揉车次数,提升泊车效率。
技术研发人员:侯明洋,刘会凯,刘奔,赵可道
受保护的技术使用者:岚图汽车科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!