追随行驶支援装置、追随行驶支援方法以及计算机程序与流程
本发明涉及追随行驶支援装置、追随行驶支援方法以及计算机程序。
背景技术:
1、在专利文献1中,记载了在本车辆的前方存在先行车的情况下,进行以相对先行车保持设定车间距离的方式追随行驶的追随行驶控制。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2004-034917号公报
技术实现思路
1、在追随行驶中,由于先行车的挡风效果,对在先行车的后方行驶的车辆作用的空气阻力被降低,后方车辆中的燃料消耗量或者电力消耗量被降低。此时,空气阻力的降低效果根据先行车的特性而变化。例如,在先行车是大型车的情况下,相比于先行车是小型车的情况,空气阻力的降低效果变大。
2、因此,最好对车辆的乘员建议如通过追随行驶得到的效果尽可能变大那样的向先行车的追随行驶。然而,如果针对不希望追随行驶的车辆的乘员持续建议向先行车的追随行驶,则存在车辆的乘员感到上述建议麻烦的可能性。另外,车辆的乘员进行用于中止追随行驶的建议的操作是不方便的。
3、因此,鉴于上述课题,本发明的目的在于,在车辆的乘员不希望追随行驶的情况下,无需由乘员操作而中止追随行驶的建议。
4、本公开的要旨如以下所述。
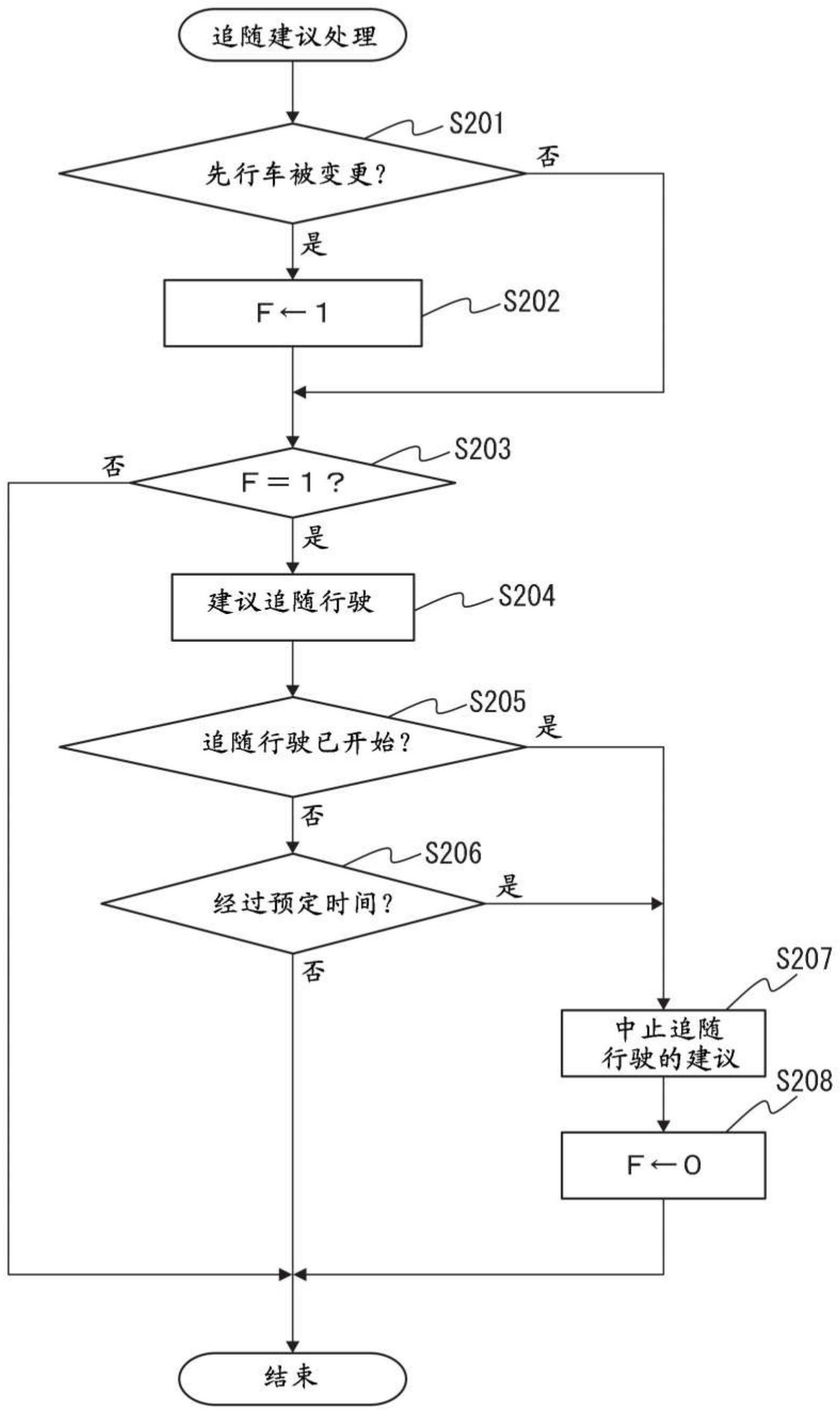
5、(1)一种追随行驶支援装置,具备:信息获取部,获取与本车辆的周围的周边车辆有关的信息;先行车选择部,根据与所述周边车辆有关的信息,选择作为所述本车辆的追随对象适合的先行车;以及建议部,对所述本车辆的乘员建议所述本车辆向所述先行车的追随行驶,所述建议部在尽管建议所述追随行驶但所述追随行驶未开始的情况下,中止所述追随行驶的建议。
6、(2)在上述(1)记载的追随行驶支援装置中,所述建议部在直至所述追随行驶的建议持续预定时间为止所述追随行驶未开始的情况下,中止所述追随行驶的建议。
7、(3)在上述(2)记载的追随行驶支援装置中,在所述建议部中,作为所述先行车的追随对象的适应度越高,则使所述预定时间越长。
8、(4)在上述(1)记载的追随行驶支援装置中,所述建议部在尽管所述追随行驶被建议预定次数但所述追随行驶未开始的情况下,中止所述追随行驶的建议。
9、(5)在上述(4)记载的追随行驶支援装置中,在所述建议部中,作为所述先行车的追随对象的适应度越高,则使所述预定次数越多。
10、(6)在上述(1)至(5)中的任意1个记载的追随行驶支援装置中,所述建议部在尽管建议所述追随行驶但所述追随行驶未开始的状况持续预定数的行程的情况下,在下次以后的行程中不进行所述追随行驶的建议。
11、(7)在上述(1)至(6)中的任意1个记载的追随行驶支援装置中,在所述建议部中,即使尽管建议所述追随行驶但所述追随行驶未开始,在所述本车辆难以移动到所述先行车的后方时,也继续建议所述追随行驶。
12、(8)一种由计算机执行的追随行驶支援方法,包括:获取与本车辆的周围的周边车辆有关的信息;根据与所述周边车辆有关的信息,选择作为所述本车辆的追随对象适合的先行车;对所述本车辆的乘员建议所述本车辆向所述先行车的追随行驶;以及在尽管建议所述追随行驶但所述追随行驶未开始的情况下,中止所述追随行驶的建议。
13、(9)一种计算机程序,使计算机执行:获取与本车辆的周围的周边车辆有关的信息;根据与所述周边车辆有关的信息,选择作为所述本车辆的追随对象适合的先行车;对所述本车辆的乘员建议所述本车辆向所述先行车的追随行驶;以及在尽管建议所述追随行驶但所述追随行驶未开始的情况下,中止所述追随行驶的建议。
14、根据本发明,在车辆的乘员不希望追随行驶的情况下,无需由乘员操作而能够中止追随行驶的建议。
技术特征:
1.一种追随行驶支援装置,具备:
2.根据权利要求1所述的追随行驶支援装置,其中,
3.根据权利要求2所述的追随行驶支援装置,其中,
4.根据权利要求1所述的追随行驶支援装置,其中,
5.根据权利要求4所述的追随行驶支援装置,其中,
6.根据权利要求1至5中的任意一项所述的追随行驶支援装置,其中,
7.根据权利要求1至5中的任意一项所述的追随行驶支援装置,其中,
8.一种由计算机执行的追随行驶支援方法,包括:
9.一种计算机程序,使计算机执行:
技术总结
本发明公开追随行驶支援装置、追随行驶支援方法以及计算机程序。在车辆的乘员不希望追随行驶的情况下,无需由乘员操作而中止追随行驶的建议。追随行驶支援装置具备:信息获取部(15),获取与本车辆(20)的周围的周边车辆(30)有关的信息;先行车选择部(16),根据与周边车辆有关的信息,选择作为本车辆的追随对象适合的先行车;以及建议部(17),对本车辆的乘员建议本车辆向先行车的追随行驶。建议部在尽管建议追随行驶但追随行驶未开始的情况下,中止追随行驶的建议。
技术研发人员:松永高广
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!