车辆路径追随控制方法、系统、装置及存储介质
本发明涉及智能化控制领域,尤其涉及一种车辆路径追随控制方法、系统、装置及存储介质。
背景技术:
1、随着人们对智能化在新能源汽车技术中的不断重视,智能驾驶技术成为了新能源汽车的发展重点,其中,路径追随作为智能驾驶中的关键部分,通过规划层输出的期望追随目标计算出执行机构的指令,可以实现车辆动力学约束下的精确追随。但目前的追随路径控制方法常常忽视了智能车辆在路径追随过程中的追随精度,针对智能车辆路径追随控制的研究场景也较为单一,大多数仅关注追随过程中的横向位移误差和航向角误差,然而,由于实际的追随工况比较复杂,智能车辆追随性能受到车身运动姿态、轮胎受力和路面环境的共同影响,当追随车速较大或道路行驶条件较差时,车轮驱动力容易突破轮胎的附着极限,智能车辆出现侧滑或甩尾等失稳现象的可能性变大,从而使得整车的路径追随性能急剧恶化。
2、而轮毂电机驱动智能车辆有着较为灵活的动力学特性,其多自由度的力矩分配方式可满足智能车辆不同状态的控制需求,对提高智能车辆在不同追随工况下的适应能力有重要的作用。其中,轮毂电机驱动车辆采用分布式驱动结构,将电机、减速器和制动器集成内置于车轮中,相较于传统集中式驱动和桥电机驱动车辆,省去了用于力矩传递的传统机械装置,通过直接调节四轮力矩即可改变车身姿态。基于设计的相关力矩控制策略,还可实现不同工况下车辆的最优化控制,改善整车的动力学特性,为新能源汽车控制智能化提供了较为理想的研究平台,目前已成为汽车领域各学者的研究热点。
3、因此,如何实现不同行驶工况下智能车辆路径追随的稳定控制,同时保证智能车辆具有较高的追随精度已成为亟需解决的技术难题。
技术实现思路
1、为了解决上述问题,本发明提出了一种车辆路径追随控制方法、系统、装置及存储介质,能够实现不同行驶工况下智能车辆路径追随的稳定控制,同时保证智能车辆具有较高的追随精度。
2、本发明实施例第一方面公开了一种车辆路径追随控制方法,所述方法包括以下步骤:
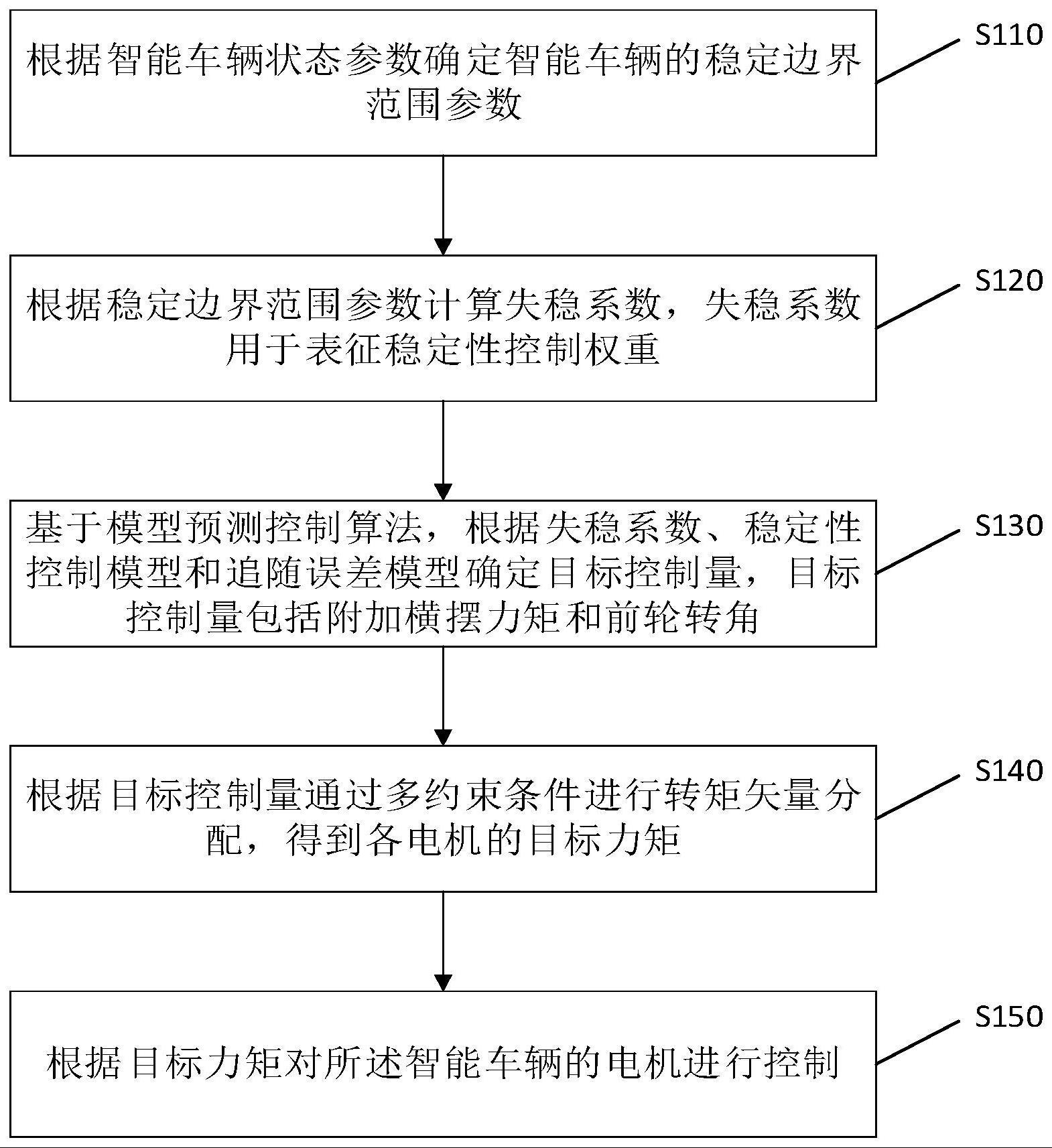
3、根据智能车辆状态参数确定智能车辆的稳定边界范围参数;
4、根据所述稳定边界范围参数计算失稳系数,其中,所述失稳系数用于表征稳定性控制权重;
5、基于模型预测控制算法,根据所述失稳系数、稳定性控制模型和追随误差模型确定目标控制量,所述目标控制量包括附加横摆力矩和前轮转角;
6、根据所述目标控制量通过多约束条件进行转矩矢量分配,得到各电机的目标力矩;
7、根据所述目标力矩对所述智能车辆的电机进行控制。
8、在一些实施例中,所述根据智能车辆状态参数确定智能车辆的稳定边界范围参数包括以下步骤:
9、将所述智能车辆状态参数输入边界辨识模型,得到稳定边界范围参数,其中,所述智能车辆状态参数包括车轮附着极限系数、车速和前轮转角,所述稳定边界范围参数包括用于确定表征稳定边界范围的第一边界直线的截距、第二边界直线的截距、第一边界直线的斜率和第二边界直线的斜率,所述第一边界直线的斜率和第二边界直线的斜率相同;
10、其中,所述边界辨识模型通过以下步骤获得:
11、获取样本数据,其中,所述样本数据的输入包括车轮附着极限系数、车速和前轮转角,标签包括稳定边界范围参数;
12、初始化遗传算法优化的反向传播神经网络,其中,所述遗传算法优化的反向传播神经网络包括遗传算法优化子网络和反向传播神经子网络,所述反向传播神经子网络的权值和阈值编码为所述遗传算法优化子网络的种群个体;
13、将所述样本数据输入所述遗传算法优化子网络以对所述种群个体进行不断迭代操作得到优化后的种群个体,其中,所述迭代操作包括选择操作、交叉操作和变异操作;
14、对优化后的种群个体进行解码,得到反向传播神经子网络的最优权值和阈值;
15、根据所述反向传播神经子网络的最优权值和阈值进行误差计算和约束条件判断,直到所述反向传播神经子网络的误差小于预设值以及满足约束条件,得到边界辨识模型。
16、在一些实施例中,所述根据所述稳定边界范围参数计算失稳系数包括以下步骤:
17、根据所述稳定边界范围参数中的第一边界直线的斜率和第一边界直线的截距确定在质心侧偏角-质心侧偏角速度相平面图上稳定边界范围的安全距离;
18、根据所述稳定边界范围参数中的第一边界直线的斜率确定在质心侧偏角-质心侧偏角速度相平面图上速度点与安全直线的垂直距离,其中,所述安全直线与所述第一边界直线平行且距离相等,所述安全直线与所述第二边界直线平行且距离相等;
19、根据所述安全距离和所述垂直距离确定失稳系数,其中,失稳系数κ表示为:
20、
21、其中,dsta为安全距离,dc为垂直距离。
22、在一些实施例中,所述基于模型预测控制算法,根据所述失稳系数、稳定性控制模型和追随误差模型确定目标控制量包括以下步骤:
23、基于模型预测控制算法,根据所述稳定性控制模型和所述追随误差模型确定由状态空间方程表达的控制量预测模型,其中,所述控制量预测模型表示为:
24、
25、其中,x为控制目标状态量,ed、eφ和均为追随误差模型的控制目标状态量,ed为横向偏差,eφ为航向角偏差;β和γ均为稳定性控制模型的控制目标状态量,β为质心侧偏角,γ为横摆角速度;u为系统控制量,u=[δ mz],δ为前轮转角,mz为附加横摆力矩,w为干扰项,ac、bc和dc均为系统矩阵;
26、对所述控制量预测模型进行离散和迭代运算得到系统输出方程;
27、根据所述系统输出方程、所述系统控制量和所述失稳系数确定控制器优化目标函数;
28、根据所述控制器优化目标函数对所述稳定性控制模型和所述追随误差模型进行约束,得到目标控制量。
29、在一些实施例中,所述根据所述系统输出方程、所述系统控制量和所述失稳系数确定控制器优化目标函数包括以下步骤:
30、根据失稳系数与路径追随控制权重比例系数的关系函数确定路径追随控制权重参数;
31、根据失稳系数与稳定性控制权重比例系数的关系函数确定稳定性控制权重参数;
32、根据所述路径追随控制权重参数和稳定性控制权重参数获得控制器输出误差的权重占比;
33、根据所述系统输出方程、所述系统控制量和所述控制器输出误差的权重占比确定控制器优化目标函数。
34、在一些实施例中,所述根据所述目标控制量通过多约束条件进行转矩矢量分配,得到各电机的目标力矩包括以下步骤:
35、获取多约束条件和控制目标函数,所述目标控制量通过多约束条件进行优化分配,所述多约束条件包括附加横摆力矩的等式约束条件、纵向总需求力的等式约束条件和基于电机外特性曲线和附着极限的不等式约束条件;
36、根据所述控制目标函数和所述多约束条件进行驱动力分配得到各电机的期望驱动力;
37、根据电机的所述期望驱动力得到对应电机的目标力矩。
38、在一些实施例中,所述车辆路径追随控制方法还包括以下步骤:
39、根据滑转利用率控制触发机制判断是否采用最佳滑转利用率控制策略,其中,所述滑转利用率控制触发机制包括判断转速差值大于预设转速的第一条件是否成立、滑动率大于预设滑动率的第二条件是否成立和失稳持续时间大于预设持续时间的第三条件是否成立,若第一条件、第二条件和第三条件均成立,则确定采用最佳滑转利用率控制策略;
40、当确定采用最佳滑转利用率控制策略,则根据最佳滑动率对电机输出力矩进行矢量调节,优化各电机的目标力矩。
41、本发明实施例第二方面公开了一种车辆路径追随控制系统,所述系统包括以下步骤:
42、第一模块,用于根据智能车辆状态参数确定智能车辆的稳定边界范围参数;
43、第二模块,用于根据所述稳定边界范围参数计算失稳系数,其中,所述失稳系数用于表征稳定性控制权重;
44、第三模块,用于基于模型预测控制算法,根据所述失稳系数、稳定性控制模型和追随误差模型确定目标控制量,所述目标控制量包括附加横摆力矩和前轮转角;
45、第四模块,用于根据所述目标控制量通过多约束条件进行转矩矢量分配,得到各电机的目标力矩;
46、第五模块,用于根据所述目标力矩对所述智能车辆的电机进行控制。
47、本发明实施例第三方面公开了一种车辆路径追随控制装置,所述装置包括:
48、至少一个处理器;
49、至少一个存储器,用于存储至少一个程序;
50、当所述至少一个程序被所述至少一个处理器执行,使得至少一个所述处理器实现如第一方面的任一项所述的车辆路径追随控制方法。
51、本发明实施例第四方面公开了一种计算机存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由所述处理器执行时用于实现如第一方面的任一项所述的车辆路径追随控制方法。
52、与现有技术相比,本发明至少具有以下优点/有益效果之一:
53、首先根据智能车辆状态参数确定智能车辆的稳定边界范围参数,并根据稳定边界范围参数计算用于表征稳定性控制权重的失稳系数,然后基于模型预测控制算法,根据失稳系数、稳定性控制模型和追随误差模型确定附加横摆力矩和前轮转角,再根据附加横摆力矩和前轮转角通过多约束条件进行转矩矢量分配,得到各电机的目标力矩,最后根据目标力矩对智能车辆的电机进行控制。本发明基于模型预测控制算法,根据失稳系数自适应分配路径追随控制和稳定性控制的权重,保证智能车辆行驶稳定的同时具有较高的追随精度。此外,本发明还通过多约束条件进行转矩矢量分配,能够实现不同行驶工况下智能车辆路径追随的稳定控制。
- 还没有人留言评论。精彩留言会获得点赞!