一种纯电动客车的动力系统控制方法与流程
本发明涉及新能源汽车动力系统,具体涉及一种纯电动客车的动力系统控制方法。
背景技术:
1、现有的纯电动客车动力系统控制方法通常是对于驱动或制动工况,通过驱动踏板或制动踏板开度,直接映射到电机扭矩,从而输出扭矩控制指令给电机。然而,由于驾驶员驾驶电动汽车和传统汽车时驾驶感觉、驾驶习惯和驾驶舒适性有所不同,电动汽车与传统汽车的驾驶存在差异性,现有的扭矩控制指令不能实时反映驾驶员驾驶意图,扭矩跟随性较差且波动较大,对电动汽车续驶里程有较大影响。
2、另外,由于纯电动客车运行工况是由不同的工作状态组成,即驱动行驶、再生制动等,为了提高纯电动汽车的能量利用率和传动效率,需要针对不同的行驶工况制定出不同的控制方法,使得纯电动客车适用于不同的运行工况。
3、申请号为cn 201910397396.0的中国发明专利申请公开了一种基于驾驶员加速意图识别的纯电动汽车驱动电机控制方法,包括:电动汽车整车控制器分别分配给电机基准输出转矩和动态补偿转矩,驱动电机总的输出转矩由二者相加得到。该方案通过踏板开度线性查表,得到电机基准输出转矩,通过踏板开度变化率线性查表,得到动态补偿转矩,再将电机基准输出转矩和动态补偿转矩的合扭矩作用于车辆,但是该方案中为单纯的线性相关对应扭矩关系,并未考虑车速、加速度等车辆信息,其得到的电机输出合扭矩不能较为真实地反映实际需求;另外,此方案并未考虑风阻滚阻等因素,并未通过踏板开度变化率,实时切换对应模式,难以反映司机对加速的需求,如急切加速、正常行驶、柔和行驶,无法满足驾驶员在各种复杂工况下的动力需求。
4、车辆动力学方程(具体参见:余志生,机械工业出版社.汽车理论[m].机械工业出版社,2009.)表示车辆的动力学行为,即车辆的加速度与总牵引力、总质量之间的关系。此外,车辆的基本动力学方程还表示车辆的驱动力与行驶阻力之间的关系。驱动力等于车辆的滚动阻力、坡度阻力、空气阻力和加速阻力四个阻力之和。
技术实现思路
1、本发明的目的在于,针对上述现有技术的不足,提供一种纯电动客车的动力系统控制方法,能够实时切换不同的驱动、制动模式,实现纯电动客车在不同驱动、制动工况下的加速度及扭矩控制,满足驾驶员在各种复杂工况下的动力需求。
2、为解决上述技术问题,本发明所采用的技术方案是:
3、一种纯电动客车的动力系统控制方法,包括以下步骤:
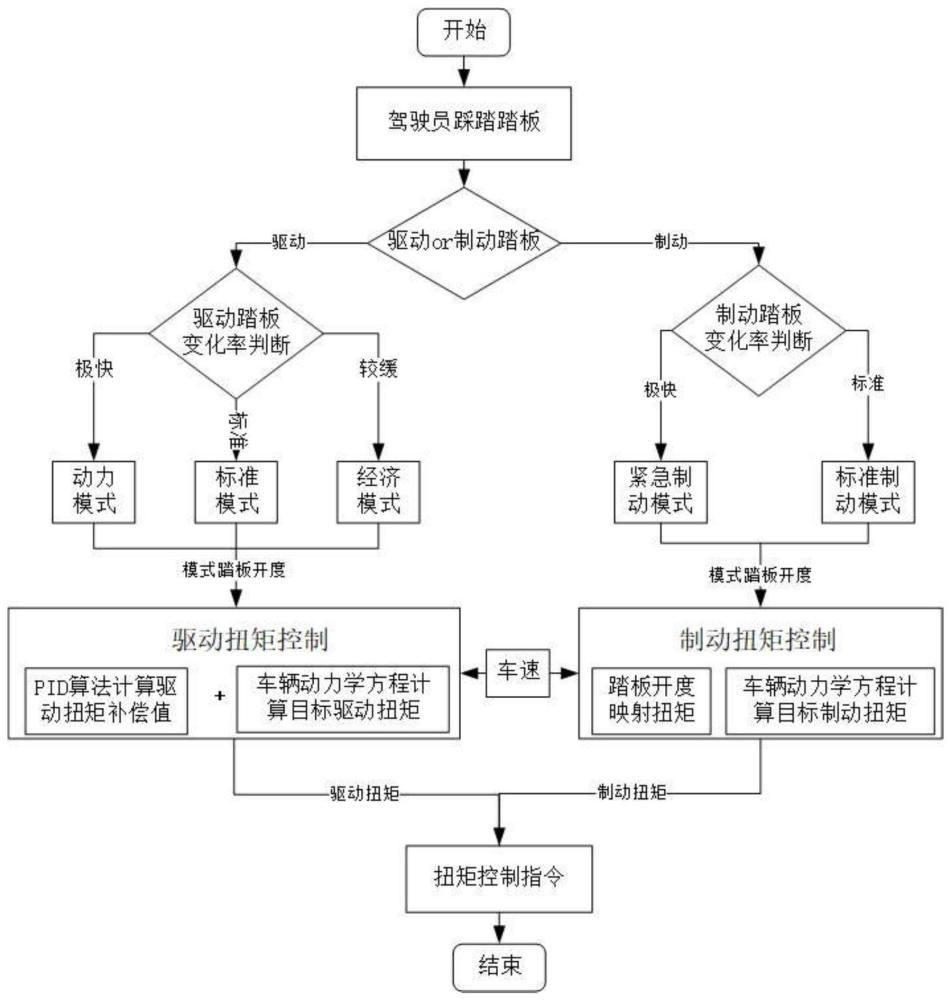
4、步骤1:获取驱动控制信息或制动控制信息;
5、步骤2:当获得驱动控制信息时,根据驱动踏板变化率k的值,切换到动力模式、标准模式或经济模式,并输出对应模式下的驱动踏板开度曲线;
6、当获得制动控制信息时,根据制动踏板变化率k1的值,切换到紧急制动模式或标准制动模式,并输出对应模式下的制动踏板开度曲线;
7、其中,所述驱动踏板开度曲线为设定的目标驱动踏板开度-输入驱动踏板开度的对应关系曲线,所述制动踏板开度曲线为设定的目标制动踏板开度-输入制动踏板开度的对应关系曲线,将二者预先下载到整车控制器中,并由整车控制器在控制车辆行驶时调用;
8、步骤3:过所述驱动踏板开度曲线,得到目标驱动踏板开度,计算车辆驱动扭矩值t合;通过所述制动踏板开度曲线,得到目标制动踏板开度,计算目标制动扭矩值t目标1;
9、步骤4:根据所述车辆驱动扭矩值t合或所述目标制动扭矩值t目标1,输出相应的扭矩控制指令给电机控制器。
10、本发明通过识别驾驶意图,对驾驶员驱动、制动踏板变化率进行判断,实时切换不同的驱动、制动模式,能够真实地反映司机的实际需求,实现纯电动客车在不同驱动、制动工况下的加速度及扭矩控制,满足驾驶员在各种复杂工况下的动力需求,提高驱动、制动扭矩的跟随性与稳定性,更有效地保证车辆动力性、与行车安全性。
11、进一步,步骤2中,当获得驱动控制信息时,若所述驱动踏板变化率k大于或等于设定阈值α,判断为动力模式;若所述驱动踏板变化率k大于设定阈值β且小于设定阈值α,判断为标准模式;若所述驱动踏板变化率k小于设定阈值β,判断为经济模式;
12、当获得制动控制信息时,若所述制动踏板变化率k1大于或等于设定阈值α1,判断为紧急制动模式;若所述制动踏板变化率k1小于设定阈值α1,判断为标准制动模式。
13、本发明针对纯电动客车的特性,通过设定阈值,制定不同的驱动、制动模式,满足驾驶员的驾驶需求。相比于传统踏板映射扭矩的办法,实现了对驾驶意图的识别,驾驶模式的评定,更能够满足驾驶需求。
14、进一步,所述驱动踏板开度曲线的获取过程包括:(a)获取不同驾驶员行驶过程中的历史数据,其中,所述历史数据包括:驱动踏板开度,驱动踏板开度变化率;(b)根据所述驱动踏板开度变化率,将所述历史数据归类为动力模式、标准模式、经济模式;(c)在每种模式下,以所述驱动踏板开度变化率与所述驱动踏板开度的二维插值为输入,以目标驱动踏板开度为输出,利用matlab进行可视化处理,得到每种模式对应的驱动踏板开度曲线;
15、所述制动踏板开度曲线的获取过程包括:(a1)获取不同驾驶员行驶过程中的历史数据,其中,所述历史数据包括:制动踏板开度,制动踏板开度变化率;(b1)根据所述制动踏板开度变化率,将所述历史数据归类为紧急制动模式、标准制动模式;(c1)在每种模式下,以所述制动踏板开度变化率与所述制动踏板开度的二维插值为输入,以目标制动踏板开度为输出,利用matlab进行可视化处理,得到每种模式对应的制动踏板开度曲线。
16、优选地,步骤3中,所述车辆驱动扭矩值t合的计算公式为:
17、t合=ut(t)+t目标;
18、其中,ut(t)为驱动扭矩补偿值,t目标为目标驱动扭矩值。
19、进一步,所述目标驱动扭矩值t目标的计算公式为:
20、t目标·ig·io·ηt/r=δ·m.aset+mg·f+cw·a·v2act/21.15;
21、其中,aset为目标驱动踏板开度和车速的二维插值表获得的经验标定的目标加速度值;δ为旋转质量系数;采用直驱方案ig=1;io为主减速比;ηt为传动效率;r为滚动半径;m为车辆重量;g为重力加速度;f为滚动阻力系数;cw为风阻系数;vact为车辆实际速度;a为迎风面积;
22、所述驱动扭矩补偿值ut(t)的计算公式为:
23、
24、其中,t=kts,ts为离散的数据采样周期,ea(t)=aset-aact(t)为目标加速度aset和实际加速度aact的偏差信号,kpt为比例系数,kit为积分系数,kdt为微分系数。
25、本发明充分考虑了风阻滚阻等阻力,通过模式开度曲线得到目标加速度,结合车辆动力学方程计算目标驱动扭矩值,更符合车辆的实际情况,同时以实际加速度作为输入,通过pid算法,计算出补偿转矩,当规划加速度远大于实际加速度时候,根据加速度偏差来进行补偿扭矩,其得到的电机扭矩符合车辆的实际情况,同时满足动态平衡实际的需求。
26、优选地,步骤3中,所述目标制动扭矩值t目标1的计算公式为:
27、t目标1·ig·io·ηt/r=mg·f+cw·a·v2act/21.15+δ·m.aset1;
28、其中,aset1为目标制动踏板开度和车速的二维插值表获得的经验标定的规划目标减速度值;δ为旋转质量系数;采用直驱方案ig=1;io为主减速比;ηt为传动效率;r为滚动半径;m为车辆重量;g为重力加速度;f为滚动阻力系数;cw为风阻系数;vact为车辆实际速度;a为迎风面积。
29、本发明采用开环控制结构,结合车辆动力学方程计算目标制动扭矩,考虑了各种阻力,能够及时地反应制动需求,极大地提高了制动扭矩的跟随性与稳定性,更有效地保证了车辆的动力性与安全性,能够及时响应驾驶员的驾驶需求。
30、与现有技术相比,本发明所具有的有益效果为:
31、(1)本发明针对纯电动客车的特性,通过实时识别驱动、制动踏板的变化率快慢,判断驾驶员的驾驶意图。在驱动时,能够实时切换动力模式、标准模式,经济模式;在制动时,能够实时切换紧急制动模式,标准制动模式,实现纯电动客车在不同驱动、制动工况下的加速度及扭矩控制,满足驾驶员在各种复杂工况下的动力需求,提高驱动、制动扭矩的跟随性与稳定性,更有效的保证车辆动力性与安全性。
32、(2)本发明结合pid算法和车辆动力学方程,得到车辆的驱动扭矩;采用开环控制结构,得到目标制动扭矩,能够及时地反应制动需求。本发明极大地提高了驱动、制动扭矩的跟随性与稳定性,更有效地保证了车辆的动力性与安全性,能够及时响应驾驶员的驾驶需求。
- 还没有人留言评论。精彩留言会获得点赞!