目标运动预测方法、系统及存储介质与流程
本发明涉及汽车领域,特别是涉及一种用于车辆紧急制动工况目标识别的目标运动预测方法、系统及存储介质。
背景技术:
1、随着智能驾驶技术的进步和相关法规的完善,自动紧急制动功能已成为高级辅助驾驶系统和无人驾驶系统中必不可少的关键一环。自动紧急制动功能可以在自车即将与其他道路参与者如车辆、行人、自行车等目标发生碰撞时,提前采取制动以减轻或避免碰撞,从而减少交通事故的发生,保护驾驶员和乘客的生命财产安全。
2、目标运动状态预测是自动紧急制动功能算法中非常重要的一环,只有相对准确的对目标未来的运动状态进行预测,才能正确评估碰撞风险,从而在合适的时机触发自动紧急制动功能,不会因触发的过早或在没有碰撞风险的时候触发功能而影响驾驶员驾驶体验或引发追尾事故,也不会因为触发的太晚而导致不能达到预期的减轻碰撞的功能效果。
3、目前目标运动状态预测的难点主要在于环境感知输出的目标属性不准确,特别针对行人、自行车、电瓶车、摩托车等较小目标,常用的传感器如摄像头、雷达等输出的感知结果往往与真实环境中的目标属性有较大差距。如果采用错误的感知结果对目标未来的运动状态进行预测,经常会导致错误的风险评估,从而产生自动紧急制动的误触发问题。
4、因此,亟需一种能对前方目标运动进行准确预测,避免误触发自车紧急制动的方案。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、本发明要解决的技术问题是提供一种能避免目标运动识别造成误触发紧急制动紧急制动的目标运动预测方法。
3、为解决上述技术问题,本发明提供一种针对行人、自行车、电瓶车、摩托车等目标在行驶道路环境下的目标运动预测方法,用以减少针对这些目标的自动紧急制动功能的误触发。
4、本发明提供的目标运动预测方法,其用于车辆紧急制动工况目标识别,包括以下步骤:
5、s1,感知识别目标种类;此步骤是自车载感知系统获取数据,现有技术中任意一种符合本发明要求的车载感知系统均能用于本步骤;即,能对行人、自行车、电瓶车和/或摩托车进行感知识别的车载感知系统;
6、s2,根据传感器感知环境数据,计算目标当前时刻是否位于自车行驶车道内;
7、s3,若目标处于自车行驶车道内,采用感知输入的目标横纵向速度和横纵向加速度,采用匀加速模型对目标运动状态进行预测;
8、若目标处于自车行驶车道外,则不对目标进行横向运动预测,清除感知输入的目标的横向速度和横向加速度,保留纵向速度和纵向加速度,采用匀加速模型对目标运动状态进行预测;
9、s4,判断目标当前时刻是否处于自车行驶轨迹内;
10、s5,判断目标在ttc时刻是否处于自车行驶轨迹内;
11、s6,根据步骤s4判断结果、s5的判断结果和aeb危险阈值决定是否触发aeb。
12、所述目标种类包括:行人、自行车、电瓶车和摩托车至少其中一种。
13、可选择的,进一步改进所述的目标运动预测方法,计算目标当前时刻是否位于自车行驶车道内包括:
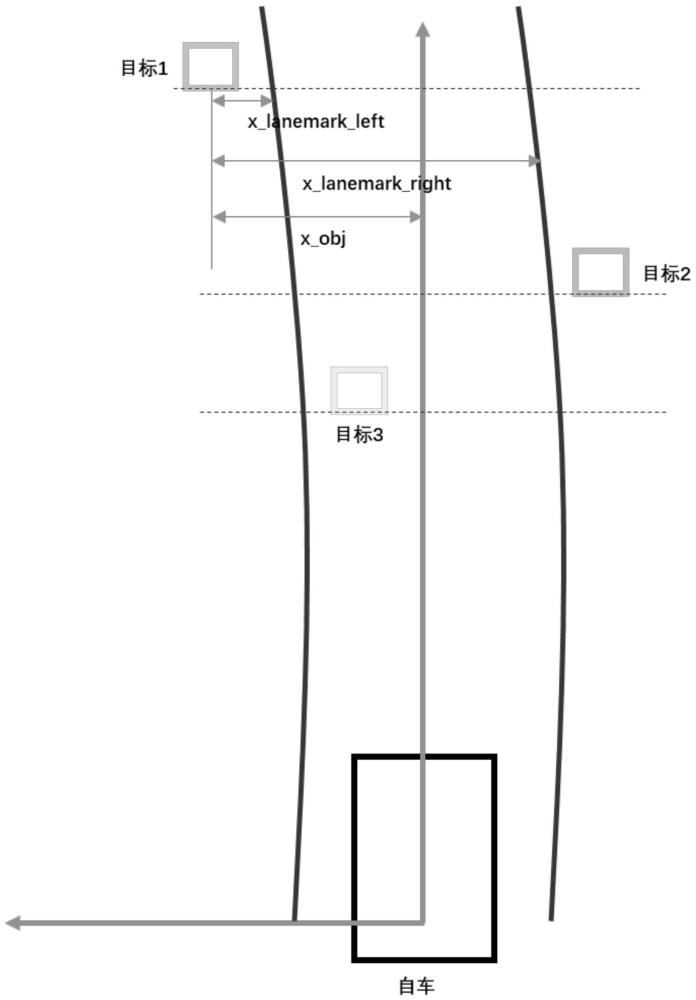
14、计算自车坐标系中,当前目标纵向距离条件下,目标与自车行驶车道右侧车道线之间横向距离为x_lanemark_right,目标与自车行驶车道左侧车道线之间横向距离x_lanemark_left,目标与自车之间横向距离x_obj;
15、若右侧车道线类型为实线或路沿,且x_obj<x_lanemark_right+c1,判断目标位于右侧自车行驶车道线外侧;
16、若左侧车道线类型为实线或路沿,且x_obj>x_lanemark_left–c1,判断目标位于左侧自车行驶车道线外侧;
17、否则,判断目标位于自车行驶车道线内;
18、其中c1为标定量,是根据路试过程根据传感器感知误差标定的阈值。
19、可选择的,进一步改进所述的目标运动预测方法,实施步骤s4时包括:
20、自车行驶轨迹方程由自车当前的航相关角速度按照圆周运动计算得到;
21、计算出目标四个角点距离当前自车行驶轨迹中心的距离分别表示为:y_cornerl、y_corner2、y_corner3和y_corner4;
22、y_min=min(abs(y_cornerl,y_corner2,y_corner3,y_corner4));。
23、若y_cornerl,y_corner2,y_corner3,y_corner4在所述坐标系下不完全同号,或|y_min|<0.5*(自车宽度+目标宽度)-c2,那么判断目标当前处于自车行驶轨迹内,c2为标定量,是根据传感器误差范围及对目标侵入的容忍程度所确定的标定阈值。
24、可选择的,进一步改进所述的目标运动预测方法,实施步骤s5时包括:
25、计算自车纵向上到达目标所需的时间ttc;
26、
27、自车与目标相对距离表示为xrel=xobj-xego;
28、自车与目标相对车速表示为vrel=vobj-vego;
29、自车与目标相对加速度表示为arel=aobj-aego;
30、xobj表示目标纵向位置,xego表示自车纵向位置,vobj表示目标纵向速度,vego表示自车纵向速度,aobj表示目标纵向加速度,aego表示自车纵向加速度。
31、可选择的,进一步改进所述的目标运动预测方法,实施步骤s6时包括:
32、若目标当前时刻及ttc时刻都处于自车行驶轨迹内,且大于aeb危险阈值则触发aeb。
33、本发明提供一种计算机可读存储介质,其内部存储有一计算机程序,所述计算机程序被执行时用于实现上述任意一项所述目标运动预测方法中的步骤。
34、本发明提供一种目标运动预测系统,其用于车辆紧急制动系统,包括:
35、数据接收单元,其自车载感知系统获取感知目标种类;
36、计算单元,其计算目标当前时刻是否位于自车行驶车道内;
37、第一判断单元,其根据目标和自车行驶车道线的位置关系,选择目标横纵向运动预测参数和模型;
38、第二判断单元,判断目标当前时刻是否处于自车行驶轨迹内;
39、第三判断单元,判断目标在ttc时刻是否处于自车行驶轨迹内;
40、第四判断单元,根据第二判断单元判断结果、第三判断单元判断结果和aeb危险阈值决定是否触发aeb。
41、可选择的,进一步改进所述的目标运动预测系统,计算单元采用以下方式计算目标当前时刻是否位于自车行驶车道内;
42、计算自车坐标系中,当前目标纵向距离条件下,目标与自车行驶车道右侧车道线之间横向距离为x_lanemark_right,目标与自车行驶车道左侧车道线之间横向距离x_lanemark_left,目标与自车之间横向距离x_obj;
43、若右侧车道线类型为实线或路沿,且x_obj<x_lanemark_right+c1,判断目标位于右侧自车行驶车道线外侧;
44、若左侧车道线类型为实线或路沿,且x_obj>x_lanemark_left–c1,判断目标位于左侧自车行驶车道线外侧;
45、否则,判断目标位于自车行驶车道线内;
46、其中c1为标定量,是根据路试过程根据传感器感知误差标定的阈值。
47、可选择的,进一步改进所述的目标运动预测系统,第一判断单元根据目标和自车行驶车道线的位置关系,选择目标横纵向运动预测参数和模型包括:
48、若目标处于自车行驶车道内,采用感知输入的目标横纵向速度和横纵向加速度,采用匀加速模型对目标运动状态进行预测;
49、若目标处于自车行驶车道外,则不对目标进行横向运动预测,清除感知输入的目标的横向速度和横向加速度,保留纵向速度和纵向加速度,采用匀加速模型对目标运动状态进行预测。
50、可选择的,进一步改进所述的目标运动预测系统,第二判断单元判断目标当前时刻是否处于自车行驶轨迹内,包括:
51、自车行驶轨迹方程由自车当前的航相关角速度按照圆周运动计算得到;
52、计算出目标四个角点距离当前自车行驶轨迹中心的距离分别表示为:y_cornerl、y_corner2、y_corner3和y_corner4;
53、y_min=min(abs(y_cornerl,y_corner2,y_corner3,y_corner4));。
54、若y_cornerl,y_corner2,y_corner3,y_corner4在所述坐标系下不完全同号,或|y_min|<0.5*(自车宽度+目标宽度)-c2,那么判断目标当前处于自车行驶轨迹内,c2为标定量,是根据传感器误差范围及对目标侵入的容忍程度所确定的标定阈值。
55、可选择的,进一步改进所述的目标运动预测系统,第三判断单元判断目标在ttc时刻是否处于自车行驶轨迹内,包括:
56、计算自车纵向上到达目标所需的时间ttc;
57、
58、自车与目标相对距离表示为xrel=xobj-xego;
59、自车与目标相对车速表示为vrel=vobj-vego;
60、自车与目标相对加速度表示为arel=aobj-aego;
61、xobj表示目标纵向位置,xego表示自车纵向位置,vobj表示目标纵向速度,vego表示自车纵向速度,aobj表示目标纵向加速度,aego表示自车纵向加速度。
62、可选择的,进一步改进所述的目标运动预测系统,第四判断单元根据第二判断单元判断结果、第三判断单元判断结果和aeb危险阈值决定是否触发aeb,包括:
63、若目标当前时刻及ttc时刻都处于自车行驶轨迹内,且大于aeb危险阈值则触发aeb。
64、本发明根据目标当前时刻是否位于自车行驶车道内选择目标横纵向运动预测参数和模型,结合目标当前时刻是否处于自车行驶轨迹内以及目标在ttc时刻是否处于自车行驶轨迹内预测目标和自车是否存在碰撞危险,采用本发明的预测方法可以排除由于感知输入目标(行人、自行车、电瓶车、摩托车等较小目标)运动属性不准确(例如当前时刻存在碰撞风险,而ttc时刻不存在碰撞风险产生的误触发)导致的自动紧急制动误触发,从而提升驾驶员的驾驶体验、充分发挥自动紧急制动功能的安全性且不引发追尾等安全问题。
- 还没有人留言评论。精彩留言会获得点赞!