一种多轴分布式新能源车辆车轮悬空防滑方法及系统与流程
本发明属于新能源车辆,具体涉及一种多轴分布式新能源车辆车轮悬空防滑方法及系统。
背景技术:
1、新能源汽车逐渐成为汽车行业的一个发展方向,新能源汽车按照驱动系统结构可分为集中式驱动和分布式驱动,分布式驱动系统由多个电机驱动,具有结构紧凑,动力分配灵活,驱动效率高等优点。
2、目前多轴分布式新能源车辆共7个轴,车长20米,10个驱动轮都能响应驱动扭矩,但是在行驶过程中车轮更容易悬空空转导致瞬间大功率放电,并在悬空和触地时造成轮胎磨损。现有技术是通过滑移率控制电机转速防止打滑,而多轴新能源车辆滑移率准确性无法保证,且无法对车轮悬空工况进行控制,而车轮悬空会导致车轮转速飙升,扭矩不变转速上升会造成瞬间大功率放电;并且车轮在即将悬空和即将触地时会造成轮胎磨损问题以及悬空过水坑时的轮胎甩水现象,影响车轮悬空的行驶观感。针对此问题现有技术通过滑移率控制电机转速防止打滑,这样,无法对车轮悬空工况进行控制,且多轴新能源车辆滑移率波动率大准确性无法保证。
技术实现思路
1、本发明提供一种多轴分布式新能源车辆车轮悬空防滑方法,方法是为了解决现有技术中无法对车轮悬空工况进行控制,且多轴新能源车辆滑移率波动率大准确性无法保证的问题。
2、方法包括:获取当前车速信息,当车速小于20km/h时,整车控制器判断驱动轮悬架高度数据是否大于车轮正常平路悬架高度阈值;
3、如大于,则判定为悬空风险轮;
4、对车辆悬空一侧的所有悬空风险轮按悬架高度从高到低排序,然后再得到悬空一侧所有非悬空风险轮的最低电机转速并标记其所在轴。
5、进一步需要说明的是,方法还包括:车辆在转弯状态下,如驱动轮悬架高度数据大于车轮正常平路悬架高度阈值时,将两侧车轮轮速比视为外侧与内侧轮胎线速度比,即外侧转弯半径与内侧转弯半径之比。
6、车辆转弯时外侧轮转角是,内侧轮转角是,则外侧轮转弯半径为,内侧转弯半径为;
7、其中为主销距,为不同轴到转向中心点的距离。
8、进一步需要说明的是,方法中,整车控制器根据转向控制器上传的车轮转角数据和阿克曼转向原理,得到转向时不同车轮之间的转速比值关系。
9、方法还将悬空一侧风险轮按照悬架高度依次与侧非悬空风险轮的最低电机转速求比值,若该比值与正常阿克曼工况比值的差大于防误触冗余量,则判定该悬空风险轮为悬空轮。
10、进一步需要说明的是,确定车轮悬空后整车控制器控制悬空车轮的电机进行扭矩协调。
11、对悬空轮所在轴的两个电机扭矩清零,当某悬空轮的悬架高度达到悬架的下跳极限时,控制所述悬空轮的电机转速为零,所述悬空轮的电机转速为零后,恢复所述电机的目标扭矩为零扭矩使其随动运转。
12、当悬空轮所在轴的两个车轮的悬架高度均恢复在正常工况高度阈值时,恢复悬空轮所在轴的两个电机的实时目标扭矩,完成悬空车轮即将悬空和即将触地时的扭矩协调。
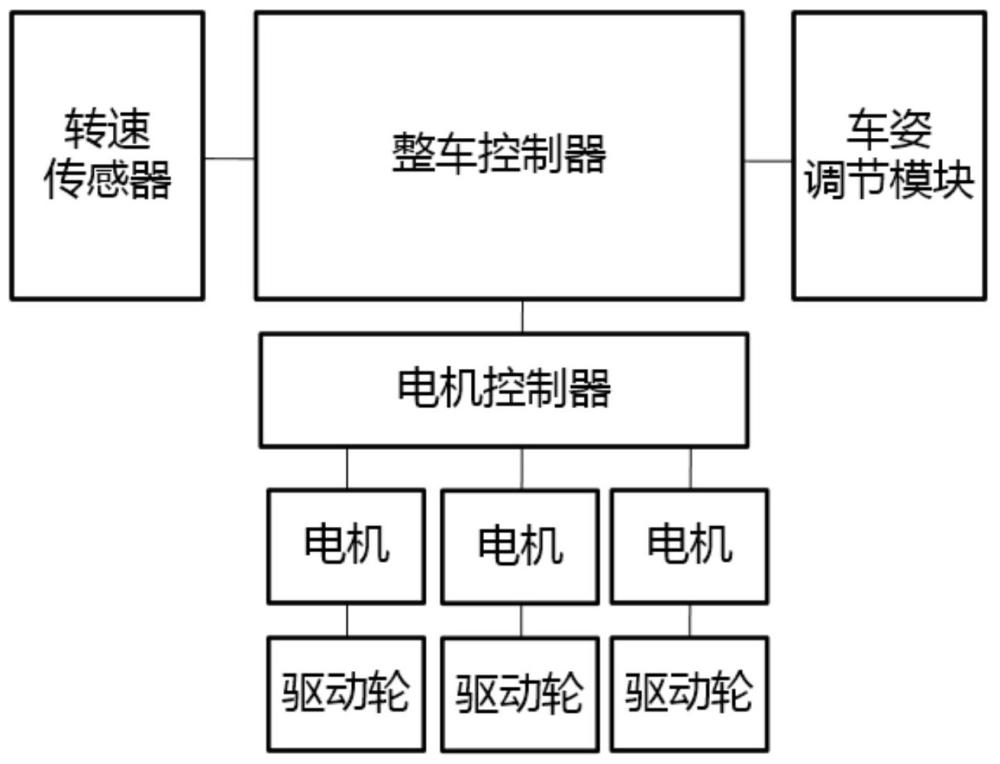
13、本发明还提供一种多轴分布式新能源车辆车轮悬空防滑系统,系统包括:整车控制器、多个驱动轮、电机控制器、转速传感器、高度传感器以及数量与驱动轮相匹配的电机;
14、整车控制器通过can通信方式与电机控制器连接,通过控制电机,使电机带动驱动轮运行;
15、整车控制器通过can通信方式与转速传感器连接,获取驱动轮转速信息;
16、整车控制器通过can通信方式与高度传感器连接,获取驱动轮悬架高度数据,判断驱动轮悬架高度数据是否大于车轮正常平路悬架高度阈值;
17、如大于,则判定为悬空风险轮;
18、对车辆悬空一侧的所有悬空风险轮按悬架高度从高到低排序,然后再得到悬空一侧所有非悬空风险轮的最低电机转速并标记其所在轴。
19、进一步需要说明的是,还包括:转向控制器;
20、整车控制器通过can通信方式与转向控制器连接,使车辆在转弯状态下,如驱动轮悬架高度数据大于车轮正常平路悬架高度阈值时,将两侧车轮轮速比视为外侧与内侧轮胎线速度比,即外侧转弯半径与内侧转弯半径之比。
21、从以上技术方案可以看出,本发明具有以下优点:
22、本发明提供多轴分布式新能源车辆车轮悬空防滑系统可以接收车轮的悬架高度数据和电机转速数据,根据车轮悬架高度识别悬空风险轮,然后根据阿克曼转向原理,通过悬空风险轮和非悬空风险轮的电机转速比值确定是否为悬空轮,控制悬空轮所在轴的两个电机扭矩为零,当悬空轮的悬架高度达到悬架的下跳极限时,控制电机转速为零,并在悬架高度恢复到正常高度时,恢复电机的实时目标扭矩。进而本发明可以避免车轮在即将悬空和即将触地时的轮胎磨损问题以及悬空过水坑时的甩水现象,有利于提升车轮悬空的行驶观感并限制了车轮悬空后的瞬间大功率放电现象。解决了现有技术通过滑移率控制电机转速防止打滑,导致无法对车轮悬空工况进行控制的问题,还避免了多轴新能源车辆滑移率波动率大准确性无法保证的弊端。
技术特征:
1.一种多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,方法包括:获取当前车速信息,当车速小于20km/h时,整车控制器判断驱动轮悬架高度数据是否大于车轮正常平路悬架高度阈值;
2.根据权利要求1所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,方法还包括:车辆在转弯状态下,如驱动轮悬架高度数据大于车轮正常平路悬架高度阈值时,将两侧车轮轮速比视为外侧与内侧轮胎线速度比,即外侧转弯半径与内侧转弯半径之比。
3.根据权利要求2所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,车辆转弯时外侧轮转角是,内侧轮转角是,则外侧轮转弯半径为 ,内侧转弯半径为 ;
4.根据权利要求1或2所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,方法中,整车控制器根据转向控制器上传的车轮转角数据和阿克曼转向原理,得到转向时不同车轮之间的转速比值关系。
5.根据权利要求4所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,方法还将悬空一侧风险轮按照悬架高度依次与侧非悬空风险轮的最低电机转速求比值,若该比值与正常阿克曼工况比值的差大于防误触冗余量,则判定该悬空风险轮为悬空轮。
6.根据权利要求5所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,确定车轮悬空后整车控制器控制悬空车轮的电机进行扭矩协调。
7.根据权利要求6所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,方法还对悬空轮所在轴的两个电机扭矩清零,当某悬空轮的悬架高度达到悬架的下跳极限时,控制所述悬空轮的电机转速为零,所述悬空轮的电机转速为零后,恢复所述电机的目标扭矩为零扭矩使其随动运转。
8.根据权利要求7所述的多轴分布式新能源车辆车轮悬空防滑方法,其特征在于,当悬空轮所在轴的两个车轮的悬架高度均恢复在正常工况高度阈值时,恢复悬空轮所在轴的两个电机的实时目标扭矩,完成悬空车轮即将悬空和即将触地时的扭矩协调。
9.一种多轴分布式新能源车辆车轮悬空防滑系统,其特征在于,系统基于权利要求1至8任意一项所述的多轴分布式新能源车辆车轮悬空防滑方法来实现;系统包括:整车控制器、多个驱动轮、电机控制器、转速传感器、高度传感器以及数量与驱动轮相匹配的电机;
10.根据权利要求9所述的多轴分布式新能源车辆车轮悬空防滑系统,其特征在于,还包括:转向控制器;
技术总结
本发明提供一种多轴分布式新能源车辆车轮悬空防滑方法及系统,属于新能源车辆技术领域,先进行车轮悬空判断、悬空车轮扭矩协调。整车控制器接收车轮的悬架高度数据和电机转速数据,根据车轮悬架高度识别悬空风险轮,然后根据阿克曼转向原理,通过悬空风险轮和非悬空风险轮的电机转速比值确定是否为悬空轮,控制悬空轮所在轴的两个电机扭矩为零,当悬空轮的悬架高度达到悬架的下跳极限时,控制电机转速为零,并在悬架高度恢复到正常高度时,恢复电机的实时目标扭矩。该系统可以避免车轮在即将悬空和即将触地时的轮胎磨损问题以及悬空过水坑时的甩水现象,有利于提升车轮悬空的行驶观感并限制了车轮悬空后的瞬间大功率放电现象。
技术研发人员:朱明辉,郎文嵩,高传哲,刘旺,张特,于海兴
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!