碰撞检测方法、装置、设备以及存储介质与流程
本公开涉及人工智能,尤其无人驾驶,具体涉及一种碰撞检测方法、装置、设备以及存储介质。
背景技术:
1、随着科技的发展,自动驾驶技术在各个领域得到了广泛的应用,特别是在矿山等复杂和危险的环境中,自动驾驶车辆可以提高生产效率,降低人力成本和安全风险。然而,自动驾驶车辆在矿山等山区行驶时,也面临着各种障碍物的干扰,如山石、矿石、矿车、工人、设备等,如果不能及时检测到这些障碍物,并采取相应的避让或制动措施,就可能导致严重的碰撞事故,造成人员伤亡和财产损失。
2、因此,自动驾驶车辆需要具备有效的碰撞检测能力,即能够实时感知周围的障碍物信息,预测未来的碰撞风险,并及时采取相应的控制策略,以保证自动驾驶车辆的安全行驶。
技术实现思路
1、本公开提供了一种碰撞检测方法、装置、设备以及存储介质。
2、根据本公开的第一方面,提供了一种碰撞检测方法,所述方法包括:
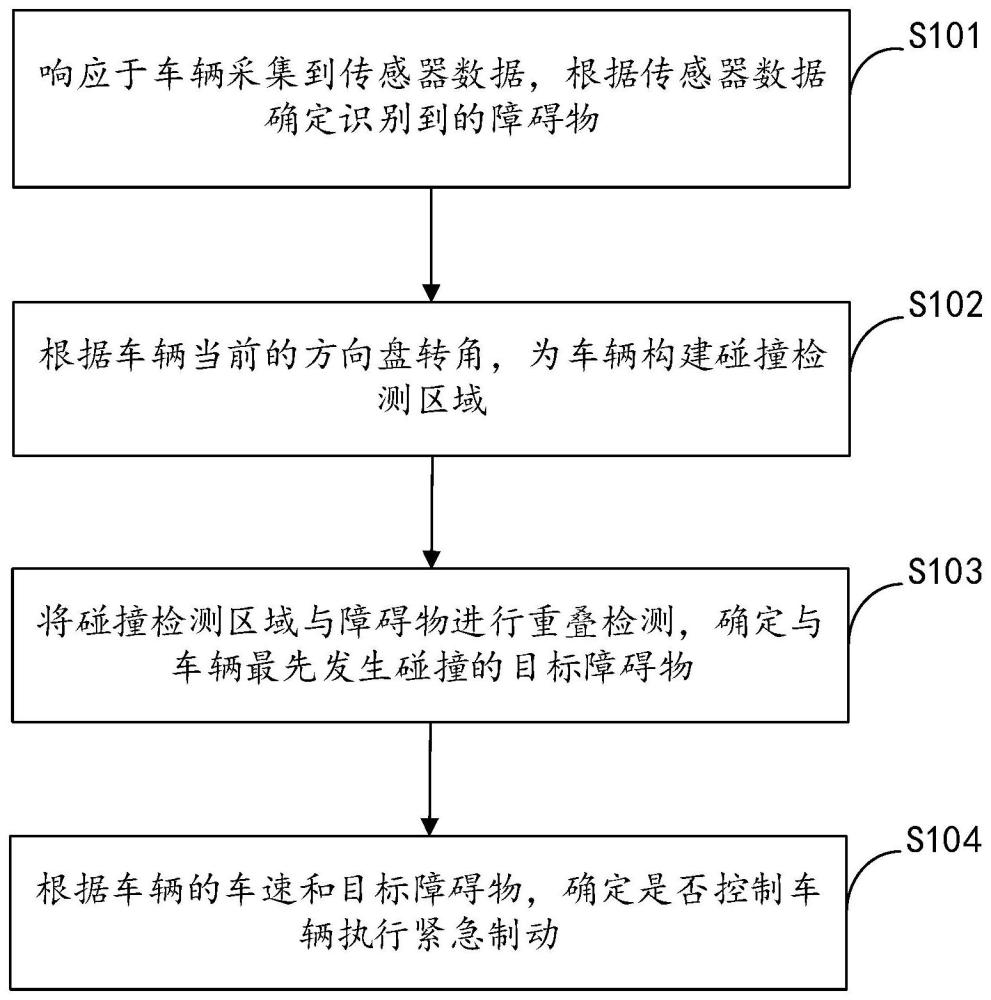
3、响应于车辆采集到传感器数据,根据所述传感器数据确定识别到的障碍物,所述障碍物包含如下至少之一信息:标识、类型、位置、形状;
4、根据所述车辆当前的方向盘转角,为所述车辆构建碰撞检测区域;
5、将所述碰撞检测区域与所述障碍物进行重叠检测,确定与所述车辆最先发生碰撞的目标障碍物;
6、根据所述车辆的车速和所述目标障碍物,确定是否控制所述车辆执行紧急制动。
7、进一步地,将所述碰撞检测区域与所述障碍物进行重叠检测,确定与所述车辆最先发生碰撞的目标障碍物,包括:
8、将所述碰撞检测区域与所述障碍物进行重叠检测,确定与所述碰撞检测区域存在重叠的碰撞风险障碍物;
9、从与所述碰撞检测区域存在重叠的碰撞风险障碍物中,筛选出与相距所述车辆最短直线距离的碰撞风险障碍物;
10、根据与所述相距车辆最短直线距离的碰撞风险障碍物,确定所述目标障碍物。
11、进一步地,根据与所述相距车辆最短直线距离的碰撞风险障碍物,确定所述目标障碍物,包括:
12、将用于描述所述车辆形状的主车矩形框从所述最短直线距离起,以所述车辆的转弯圆心为圆心,所述车辆的转弯半径为半径,按照旋转角度进行旋转;
13、若旋转所述主车矩形框得到的旋转矩形框,与所述相距车辆最短直线距离的碰撞风险障碍物之间存在重叠,则确定与所述相距车辆最短直线距离的碰撞风险障碍物为所述目标障碍物。
14、进一步地,根据所述车辆当前的方向盘转角,为所述车辆构建碰撞检测区域,包括:
15、获取所述车辆的轴距、转向传动比;
16、根据所述车辆当前的方向盘转角、所述轴距和所述转向传动比,确定所述车辆的转弯半径;
17、以所述车辆的后轴的中点为起点,向所述车辆的转弯内侧延长所述转弯半径的长度,得到所述车辆的转弯圆心;
18、以所述转弯圆心为圆心,分别从所述车辆的后轴转弯内侧点和所述车辆的前边缘外侧点按固定步长旋转角度沿所述车辆的转弯方向旋转,构建得到碰撞检测区域,其中,所述固定步长旋转角度基于所述车辆的前进或后退对应设置。
19、进一步地,在以所述转弯圆心为圆心,分别从所述车辆的后轴转弯内侧点和所述车辆的前边缘外侧点按固定步长旋转角度沿所述车辆的转弯方向旋转之前,所述方法还包括:
20、获取所述车辆在前进档时的碰撞检测区域长度,以及所述车辆在后退档时的碰撞检测区域长度;
21、根据用于描述所述车辆形状的主车矩形框的步长值、所述转弯半径、所述车辆在前进档时的碰撞检测区域长度,确定所述车辆在前进档的固定步长旋转角度;
22、根据所述步长值、所述转弯半径、所述车辆在前进档时的碰撞检测区域长度,确定所述车辆在前进档的固定步长旋转角度。
23、进一步地,所述获取所述车辆在前进档时的碰撞检测区域长度,以及所述车辆在后退档时的碰撞检测区域长度,包括:
24、获取所述车辆的最大制动减速度、所述车辆的宽度、所述车辆的前边缘到所述后轴的距离,所述车辆的后边缘到所述后轴的距离;
25、根据所述车速、所述转弯半径、所述车辆的最大制动减速度和所述车辆的前边缘到所述后轴的距离,确定所述车辆在前进档时的碰撞检测区域长度;
26、根据所述车速、所述转弯半径、所述车辆的最大制动减速度、所述车辆的前边缘到所述后轴的距离和所述车辆的后边缘到所述后轴的距离,确定所述车辆在后退档时的碰撞检测区域长度。
27、进一步地,根据所述车辆的车速和所述目标障碍物,确定是否控制所述车辆执行紧急制动,包括:
28、获取所述目标障碍物的标识和/或类型;
29、若所述标识和/或所述类型指示所述目标障碍物为需避让障碍物,则确定根据所述车辆与所述目标障碍物之间的距离,控制所述车辆执行紧急制动。
30、根据本公开的第二方面,提供了一种碰撞检测装置,所述装置包括:
31、响应单元,用于响应于车辆采集到传感器数据,根据所述传感器数据确定识别到的障碍物,所述障碍物包含如下至少之一信息:标识、类型、位置、形状;
32、构建单元,用于根据所述车辆当前的方向盘转角,为所述车辆构建碰撞检测区域;
33、检测单元,用于将所述碰撞检测区域与所述障碍物进行重叠检测,确定与所述车辆最先发生碰撞的目标障碍物;
34、确定单元,用于根据所述车辆的车速和所述目标障碍物,确定是否控制所述车辆执行紧急制动。
35、进一步地,所述检测单元,包括:
36、检测子单元,用于将所述碰撞检测区域与所述障碍物进行重叠检测,确定与所述碰撞检测区域存在重叠的碰撞风险障碍物;
37、筛选子单元,用于从与所述碰撞检测区域存在重叠的碰撞风险障碍物中,筛选出与相距所述车辆最短直线距离的碰撞风险障碍物;
38、第一确定子单元,用于根据与所述相距车辆最短直线距离的碰撞风险障碍物,确定所述目标障碍物。
39、进一步地,所述确定子单元,包括:
40、旋转子模块,用于将用于描述所述车辆形状的主车矩形框从所述最短直线距离起,以所述车辆的转弯圆心为圆心,所述车辆的转弯半径为半径,按照旋转角度进行旋转;
41、第一确定子模块,用于若旋转所述主车矩形框得到的旋转矩形框,与所述相距车辆最短直线距离的碰撞风险障碍物之间存在重叠,则确定与所述相距车辆最短直线距离的碰撞风险障碍物为所述目标障碍物。
42、进一步地,构建单元,包括:
43、第一获取子单元,用于获取所述车辆的轴距、转向传动比;
44、第二确定子单元,用于根据所述车辆当前的方向盘转角、所述轴距和所述转向传动比,确定所述车辆的转弯半径;
45、第三确定子单元,用于以所述车辆的后轴的中点为起点,向所述车辆的转弯内侧延长所述转弯半径的长度,得到所述车辆的转弯圆心;
46、构建子单元,用于以所述转弯圆心为圆心,分别从所述车辆的后轴转弯内侧点和所述车辆的前边缘外侧点按固定步长旋转角度沿所述车辆的转弯方向旋转,构建得到碰撞检测区域,其中,所述固定步长旋转角度基于所述车辆的前进或后退对应设置。
47、进一步地,所述装置还包括:
48、第二获取子单元,用于获取所述车辆在前进档时的碰撞检测区域长度,以及所述车辆在后退档时的碰撞检测区域长度;
49、第四确定子单元,用于根据预先确定的步长值、所述转弯半径、所述车辆在前进档时的碰撞检测区域长度,确定所述车辆在前进档的固定步长旋转角度;
50、第五确定子单元,用于根据预先确定的步长值、所述转弯半径、所述车辆在前进档时的碰撞检测区域长度,确定所述车辆在前进档的固定步长旋转角度。
51、进一步地,所述第二获取子单元,包括:
52、获取子模块,用于获取所述车辆的最大制动减速度、所述车辆的宽度、所述车辆的前边缘到所述后轴的距离,所述车辆的后边缘到所述后轴的距离;
53、第二确定子模块,用于根据所述车速、所述转弯半径、所述车辆的最大制动减速度和所述车辆的前边缘到所述后轴的距离,确定所述车辆在前进档时的碰撞检测区域长度;
54、第三确定子模块,用于根据所述车速、所述转弯半径、所述车辆的最大制动减速度、所述车辆的前边缘到所述后轴的距离和所述车辆的后边缘到所述后轴的距离,确定所述车辆在后退档时的碰撞检测区域长度。
55、进一步地,所述确定单元,包括:
56、第三获取子单元,用于获取所述目标障碍物的标识和/或类型;
57、第六确定子单元,用于若所述标识和/或所述类型指示所述目标障碍物为需避让障碍物,则确定根据所述车辆与所述目标障碍物之间的距离,控制所述车辆执行紧急制动。
58、根据本公开的第三方面,提供了一种电子设备,包括:
59、至少一个处理器;以及
60、与所述至少一个处理器通信连接的存储器;其中,
61、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行任一项所述的方法。
62、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据中任一项所述的方法。
63、根据本公开的第五方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序,所述计算机程序存储在可读存储介质中,电子设备的至少一个处理器可以从所述可读存储介质读取所述计算机程序,所述至少一个处理器执行所述计算机程序使得电子设备执行第一方面所述的方法。
64、根据本公开的技术,首先,响应于车辆采集到传感器数据,根据传感器数据确定识别到的障碍物。之后,根据上述车辆当前的方向盘转角,为上述车辆构建碰撞检测区域,即根据车辆的行驶状态,预测车辆在未来一段时间内可能占用的空间范围,作为碰撞检测的区域。其次,通过判断车辆的碰撞检测区域是否与识别到的障碍物有重叠,如果有重叠,说明车辆与障碍物有碰撞的可能性,需要进一步确定哪个障碍物是最有可能与车辆发生碰撞的目标障碍物。进而,根据车辆与目标障碍物之间的碰撞风险,决定是否对车辆进行紧急制动,以避免或减轻碰撞的后果。
65、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!