一种车体调平系统和车体精确调平的控制方法与流程
本发明涉及车体调平生产,具体涉及一种车体调平系统和车体精确调平的控制方法。
背景技术:
1、在汽车行驶过程中难免会遇到加速、减速、转弯以及路面不平整等各种干扰。传统空气悬架通过机械式高度阀的开启调节气囊的充放气,从而保持车辆行驶高度的恒定。随着车辆控制技术的不断发展,电控空气悬架系统正在不断取代传统空气悬架系统,电控空气悬架(ecas)来调整车辆的状态。电控空气悬架与传统空气悬架的区别是在以往传统空气悬架的基础上增加了控制单元,控制单元通过对空气弹簧充放气主动调节车身高度以适应路况的变化。
2、目前ecas车高调节主要是通过对相应电磁阀的通断状态以及状态持续时间进行控制。但是由于电控空气悬架空气弹簧内部气体状态变化的复杂性,汽车行驶状态以及外部随机路面环境的影响,行驶状态的切换必然产生偏差,导致汽车的舒适性和稳定性有一定程度的变化,因此,车身高度切换成为大众关注的焦点。
3、尽管现有技术采用高度传感器测量车架单侧高度和测量整车高度,并通过控制器控制电磁阀模块来给电控悬架气囊总成充放气,实现车辆运行状态悬架自适应高度调节、车辆静止状态悬架高度调节和车辆运行状态悬架自适应气囊总成压力调节。然而,这种电控悬架控制方法仅可以进行简单的调平,使得车架与车轴之间实现调平;但在特殊路况路段,比如施工路段,车架与车轴已实现调平,但两轮毂仍不在同一水平高度,导致仅解决了车架与车轴之间相对调整,仍不能解决整车均能处于水平高度上保证车辆平稳的问题。
技术实现思路
1、本发明的目的之一在于避免现有技术中的不足之处而提供一种车体调平系统,该车体调平系统既能保证车体中的车架与车轴保持相对调平,又能保证整车均能在水平高度上,具有调控精度高的优点。
2、本发明的目的之二在于提供一种车体精确调平的控制方法。
3、为实现上述目的之一,本发明提供以下技术方案:
4、提供一种车体调平系统,包括
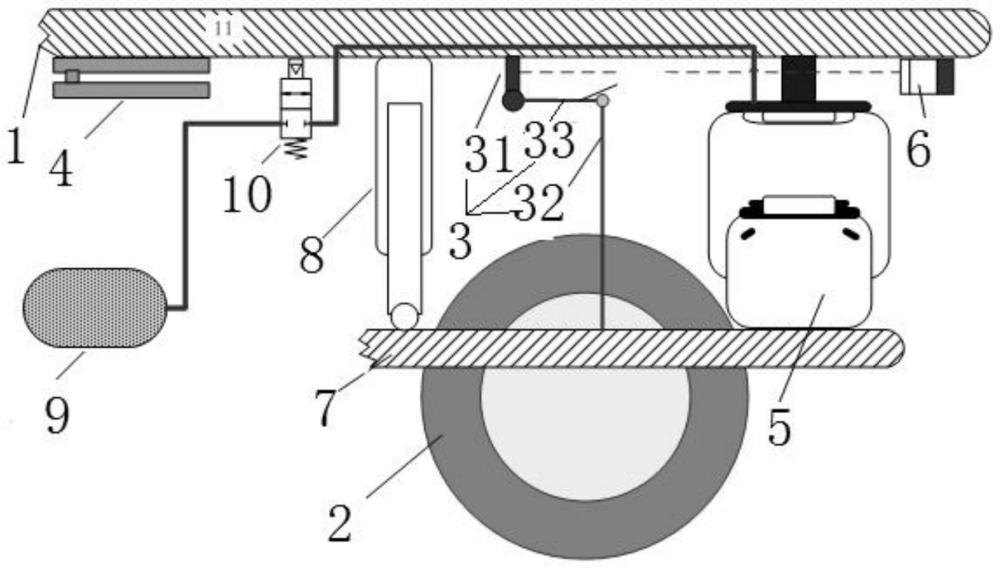
5、所述车体包括车架和车轴,所述车架与所述车轴之间的位置设有高度传感器和空气弹簧,还包括:
6、电子水平仪,所述电子水平仪设于所述车架并朝向地面;
7、控制单元,所述控制单元分别与所述高度传感器、所述电子水平仪和所述空气弹簧连接;
8、控制单元通过所述高度传感器检测所述车架与车轴之间的间距从而调整空气弹簧,以及所述控制单元通过所述电子水平仪检测车架与地面的平行度再次调整所述空气弹簧。
9、在一些实施方式中,所述控制单元为高度ecu控制单元。
10、在一些实施方式中,所述车轴通过车轮支架与所述车轮连接,所述空气弹簧置于所述车轮支架上从而与所述车轴连接。
11、在一些实施方式中,还包括减振器,所述减振器的一端与所述车架连接,另一端与所述车轮支架连接。
12、在一些实施方式中,还包括储气罐,所述储气罐通过气路管道与所述空气弹簧连接,所述气路管道上设置有电磁阀,所述控制单元通过所述电磁阀从而与所述空气弹簧连接。
13、本发明一种车体调平系统有益效果:
14、(1)本发明的车体调平系统,其设置了高度传感器,所述高度传感器检测车架与车轴之间的距离,控制单元通过获取车架与车轴之间的距离信息从而调整空气弹簧,保证了车架与车轴之间的距离在标准范围内,实现车架与车轴之间的调平;同时,还设置了电子水平仪,电子水平仪用于检测车架与地面之间的夹角,控制单元通过获取车架与地面之间的夹角实时监测车架是否与地面保持平行,若不平行则调整空气弹簧,保证了车架的水平效果,继而保证车身的稳定性和乘客的舒适性。
15、(2)本发明的车体调平系统,具有双重调平,有效解决了整车在转弯、加、减速或地面不平整路段调平的问题,减少了驾车隐患。
16、为实现上述目的之二,本发明提供以下技术方案:
17、提供一种车体精确调平的控制方法,执行于上述的车体调平系统,所述控制方法包括以下步骤:
18、s1、所述高度传感器检测车轮对应的车架与车轴之间的实时高度h实,判断是否h实≠h设,所述h设为车架与车轴之间的设定标准高度值,
19、若h实≠h设,则将判断结果反馈控制单元,所述控制单元调控空气弹簧,使整车h实=h设,表示完成第一次调整,进行下一执行步骤;
20、若h实=h设,则进行下一执行步骤;
21、s2、所述电子水平仪检测车架与地面的实时夹角α实,判断是否α实≠α设,所述α设为车架与地面之间的设定标准夹角,
22、若α实≠α设,则将判断结果反馈控制单元,所述控制单元精确调控空气弹簧,使α实=α设,表示完成第二次调整,返回步骤s1;
23、若α实=α设,则返回步骤s1。
24、在一些实施方式中,所述高度传感器包括连接杆、横杆和竖杆;
25、所述连接杆竖立设置,所述连接杆的一端固定于所述车架,另一端与所述横杆铰接;
26、所述竖杆一端与所述横杆铰接,另一端连接于所述车轴上;
27、所述高度传感器通过所述竖杆与所述横杆的相对运动产生电压变化,
28、所述判断是否h实≠h设的步骤包括:
29、s11、设定h设对应的电压为基准电压u0;
30、s12、将h实转换为电压值u;
31、s13、将u、u0反馈至比较单元,计算△u=u0-u,若△u>0或△u<0,则表示h实≠h设,
32、若△u=0,则表示h实=h设。
33、在一些实施方式中,所述判断是否α实≠α设的步骤包括:
34、s21、设置α设的范围为[α1,α2]
35、s22、比较α实是否在[α1,α2]内,若α实不在[α1,α2],则表示α实≠α设,
36、若α实在[α1,α2],则表示α实=α设。
37、在一些实施方式中,步骤s1中,所述控制单元调控空气弹簧以使整车h实=h设的步骤包括:按序调整四个车轮对应的空气弹簧,其中,
38、当u>u0时,使气囊放气;
39、当u<u0时,使气囊充气。
40、在一些实施方式中,步骤s2中,所述控制单元精确调控对应车轮上的空气弹簧以使对应车轮上的α实=α设的步骤包括:
41、当α实不在范围[α1,α2]内,且α实<0时,使α实<0对应车轮(2)的空气弹簧(5)充气,当α实不在范围[α1,α2]内,且α实>0时,保持α实>0对应车轮(2)的空气弹簧(5)不变;
42、或,
43、当α实不在范围[α1,α2]内,且α实<0时,保持α实<0对应车轮(2)的空气弹簧(5)不变,当α实不在范围[α1,α2]内,且α实>0时,α实>0对应车轮(2)的空气弹簧(5)放气;
44、或,
45、当α实不在范围[α1,α2]内,且α实<0时,使α实<0对应车轮(2)的空气弹簧(5)充气,
46、当α实不在范围[α1,α2]内,且α实>0时,使α实>0对应车轮(2)的空气弹簧(5)放气。
47、本发明一种车体精确调平的控制方法有益效果:
48、(1)本发明的车体精确调平的控制方法,其先通过高度传感器采集到车架与车轴之间的高度(距离)信息,通过比较车架与车轴之间的实际高度h实与设定的标准高度h设,判断是否需要调整车架与车轴之间的距离,当h实与h设不相等时,则通过气囊充气或放气的方式使得车架与车轴之间实现调平,实现第一次调平;接着使电子水平仪监测车架与地面的夹角,从而保持车架与地面的调平效果,实现第二次精确调平,实现车身全面调平,避免局部调平带来车身不稳定的问题。
49、(2)本发明的车体精确调平的控制方法,在电子水平仪与空气弹簧的相互配合下,由于使用电子水平仪和控制单元配合使用,能实现单边控制弹簧气囊,因此,即使关闭横向节流阀也能实现精确的单边控制。
- 还没有人留言评论。精彩留言会获得点赞!