一种双电机混合动力汽车的跛行控制系统及方法与流程
本发明涉及新能源汽车,尤其涉及一种双电机混合动力汽车的跛行控制系统及方法。
背景技术:
1、双电机混合动力汽车的跛行控制方法主要是指当车辆出现故障或异常情况时,控制系统能够将车辆调整到安全或低能耗的状态,以确保车辆能够继续行驶。
2、目前,针对双电机混合动力汽车的跛行控制方法的研究主要集中在控制策略和能量管理方面。其中,控制策略主要是指如何根据车辆的行驶状态和驾驶员的需求来智能地调整内燃机和电动机的动力输出,以保证车辆的行驶安全和效率。能量管理主要是指如何优化能量的分配和使用,以提高能源利用效率。
3、在跛行控制方面,现有所提出的新能源汽车的跛行控制方法,多数是部分动力部件故障的应急控制,如中国专利cn116533982a、中国专利cn112455425a和中国专利cn114889583a。也有一些行驶过程中对突发故障分等级处理方法,如中国专利cn114379539a和中国专利cn113844435a。此外中国专利cn115556750a和中国专利cn115476843a是针对单电机并联系统利用反电动势实现倒车和保证高压附件工作。针对双电机混合动力汽车的跛行控制,中国专利cn105644547a解决了行驶过程中动力电池故障的跛行控制方法,但并没有停车状态下的跛行控制方法。
4、综上,亟需一种安全可靠的双电机混合动力汽车的跛行控制系统及方法,来实现在停车状态下,当高压电池故障时,车辆可以实现跛行起步和低速挪车。
技术实现思路
1、为此,本发明实施例提供了一种双电机混合动力汽车的跛行控制系统及方法,用于解决现有技术中在停车状态下,双电机混合动力汽车在高压电池故障时,无法起步和低速挪车的问题。
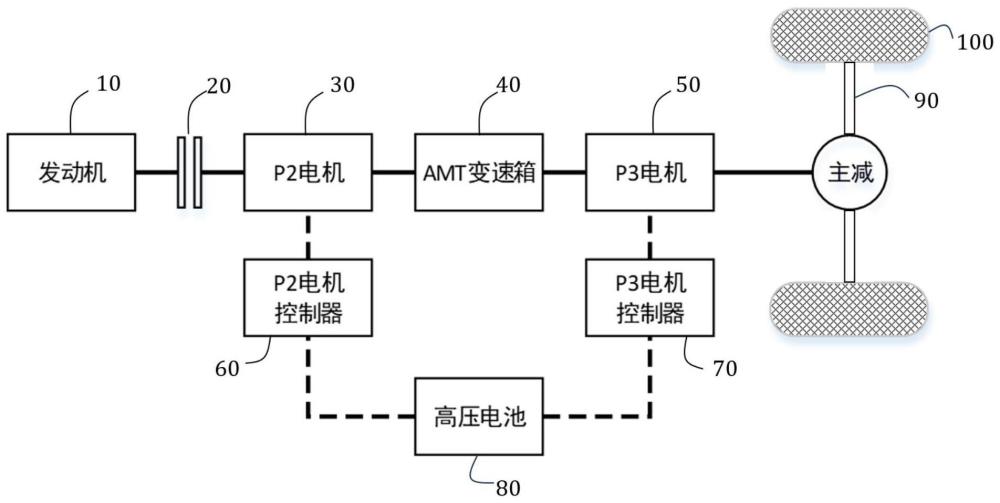
2、为了解决上述问题,本发明实施例提供一种双电机混合动力汽车的跛行控制系统,所述方法包括:发电机、离合器、p2电机、amt变速箱、p3电机、p2电机控制器、p3电机控制器、高压电池;
3、所述发动机一端通过所述离合器与所述p2电机一端连接,所述发动机用于为车辆提供动力,驱动车辆行驶,所述离合器用于传输接合或分离发动机动力;所述p2电机另一端通过所述amt变速箱与所述p3电机一端连接;所述p3电机另一端通过主减速器与驱动轴连接,p3电机用于为车辆提供动力和回收制动能量;
4、所述高压电池通过p2电机控制器、p3电机控制器分别与p2电机、p3电机连接,所述高压电池用于为p2电机、p3电机提供电能;
5、在停车状态下,当高压电池故障时,控制所述发动机以一定转速工作,带动所述p2电机同步转动,利用所述p2电机高速转动产生的反电动势为所述p3电机提供动力,进而实现车辆跛行起步和低速挪车。
6、优选地,还包括起动机,用于控制所述发动机状态。
7、优选地,所述发电机、离合器、p2电机、amt变速箱及p3电机通过机械连接。
8、优选地,所述高压电池通过p2电机控制器、p3电机控制器分别与p2电机、p3电机电性连接。
9、本发明实施例还提供了一种双电机混合动力汽车的跛行控制方法,所述方法采用上述所述的双电机混合动力汽车的跛行控制系统,具体包括:
10、在停车状态下,高压电池发生故障时,判断车辆是否满足跛行条件,如果满足,则控制amt变速箱回空挡、离合器接合,如果不满足,则重新判断;
11、判断发动机是否启动,如果发动机未启动,则控制起动机启动发动机,直到发动机处于已启动状态,如果发动机已启动,则执行下一步;
12、控制发动机以一定转速工作,p2电机不控制,发动机带动p2电机同步转动,p2电机产生反电动势;
13、判断产生的反电动势否满足跛行需求,如果不满足,则调节发动机转速,直到满足跛行需求,如果满足,则执行下一步;
14、根据不同油门开度控制p3电机输出特定扭矩,车辆实现跛行起步和低速挪车。
15、优选地,所述跛行条件为发动机、p2电机、p3电机均无故障,离合器能够正常接合,amt变速箱能够挂空挡,以及驾驶员有行车意图。
16、优选地,所述控制amt变速箱回空挡、离合器接合的方法具体包括:
17、对amt变速箱的控制为:若amt变速箱处于非空挡,则控制amt变速箱回空挡,若amt变速箱处于空挡,则保持空挡;对离合器的控制为:若离合器处于非接合状态,则控制离合器接合,若离合器处于接合状态,则保持接合。
18、优选地,所述跛行需求为p3电机直流母线电压达到设定阈值。
19、本发明实施例还提供了一种双电机混合动力汽车,所述双电机混合动力汽车包括处理器、存储器和总线系统,所述处理器和存储器通过该总线系统相连,所述存储器用于存储指令,所述处理器用于执行存储器存储的指令,以实现上述所述的双电机混合动力汽车的跛行控制方法。
20、本发明实施例还提供了一种计算机存储介质,所述计算机存储介质存储有计算机软件产品,所述计算机软件产品包括的若干指令,用以使得一台计算机设备执行上述所述的双电机混合动力汽车的跛行控制方法。
21、从以上技术方案可以看出,本发明申请具有以下优点:
22、本发明实施例提供了一种双电机混合动力汽车的跛行控制系统及方法,该系统包括发电机、离合器、p2电机、amt变速箱、p3电机、p2电机控制器、p3电机控制器、高压电池。在停车状态下,当高压电池故障时,控制发动机以一定转速工作,带动p2电机同步转动,利用p2电机高速转动产生的反电动势为p3电机提供一定的直流母线电压,并根据油门开度控制p3电机输出特定扭矩,进而实现无高压时车辆也能跛行起步和低速挪车,避免车辆在危险路况故障后无法行车造成的交通堵塞和安全事故。
技术特征:
1.一种双电机混合动力汽车的跛行控制系统,其特征在于,包括:发电机、离合器、p2电机、amt变速箱、p3电机、p2电机控制器、p3电机控制器、高压电池;
2.根据权利要求1所述的双电机混合动力汽车的跛行控制系统,其特征在于,还包括起动机,用于控制所述发动机状态。
3.根据权利要求1所述的双电机混合动力汽车的跛行控制系统,其特征在于,所述发电机、离合器、p2电机、amt变速箱及p3电机通过机械连接。
4.根据权利要求1所述的双电机混合动力汽车的跛行控制系统,其特征在于,所述高压电池通过p2电机控制器、p3电机控制器分别与p2电机、p3电机电性连接。
5.一种双电机混合动力汽车的跛行控制方法,其特征在于,所述方法采用权利要求1至4任意一项所述的双电机混合动力汽车的跛行控制系统,具体包括:
6.根据权利要求5所述的双电机混合动力汽车的跛行控制方法,其特征在于,所述跛行条件为发动机、p2电机、p3电机均无故障,离合器能够正常接合,amt变速箱能够挂空挡,以及驾驶员有行车意图。
7.根据权利要求5所述的双电机混合动力汽车的跛行控制方法,其特征在于,所述控制amt变速箱回空挡、离合器接合的方法具体包括:
8.根据权利要求5所述的双电机混合动力汽车的跛行控制方法,其特征在于,所述跛行需求为p3电机直流母线电压达到设定阈值。
9.一种双电机混合动力汽车,其特征在于,所述双电机混合动力汽车包括处理器、存储器和总线系统,所述处理器和存储器通过该总线系统相连,所述存储器用于存储指令,所述处理器用于执行存储器存储的指令,以实现权利要求5至8任意一项所述的双电机混合动力汽车的跛行控制方法。
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有计算机软件产品,所述计算机软件产品包括的若干指令,用以使得一台计算机设备执行权利要求5至8任意一项所述的双电机混合动力汽车的跛行控制方法。
技术总结
本发明提供一种双电机混合动力汽车的跛行控制系统及方法,涉及新能源汽车技术领域,该系统包括发电机、离合器、P2电机、AMT变速箱、P3电机、P2电机控制器、P3电机控制器、高压电池。在停车状态下,当高压电池故障时,控制发动机以一定转速工作,带动P2电机同步转动,利用P2电机高速转动产生的反电动势为P3电机提供一定的直流母线电压,并根据油门开度控制P3电机输出特定扭矩,进而实现无高压时车辆也能跛行起步和低速挪车,避免车辆在危险路况故障后无法行车造成的交通堵塞和安全事故。
技术研发人员:马梅,黄硕,李晓梅
受保护的技术使用者:吴江绿控电控科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!