同路跟车方法、装置、设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种同路跟车方法、装置、设备及存储介质。
背景技术:
1、目前,随着科技的发展,人们出行对智能驾驶的依赖程度逐渐提高,各种驾驶辅助功能也逐渐进入大众生活中,其中就包括自动跟车功能。
2、现有的自动跟车功能一般为用户选取前方车辆作为领航车辆,并跟随行驶,但由于用户并不知道领航车辆的行车路线,若领航车辆的行车路线与用户车辆的行车路线不一致或短暂一致时,需要用户频繁切换领航车辆,操作较为繁琐。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种同路跟车方法、装置、设备及存储介质,旨在解决现有技术中若领航车辆的行车路线与用户车辆的行车路线不一致或短暂一致时,需要用户频繁切换领航车辆,操作较为繁琐的技术问题。
2、为实现上述目的,本发明提供了一种同路跟车方法,所述同路跟车方法包括以下步骤:
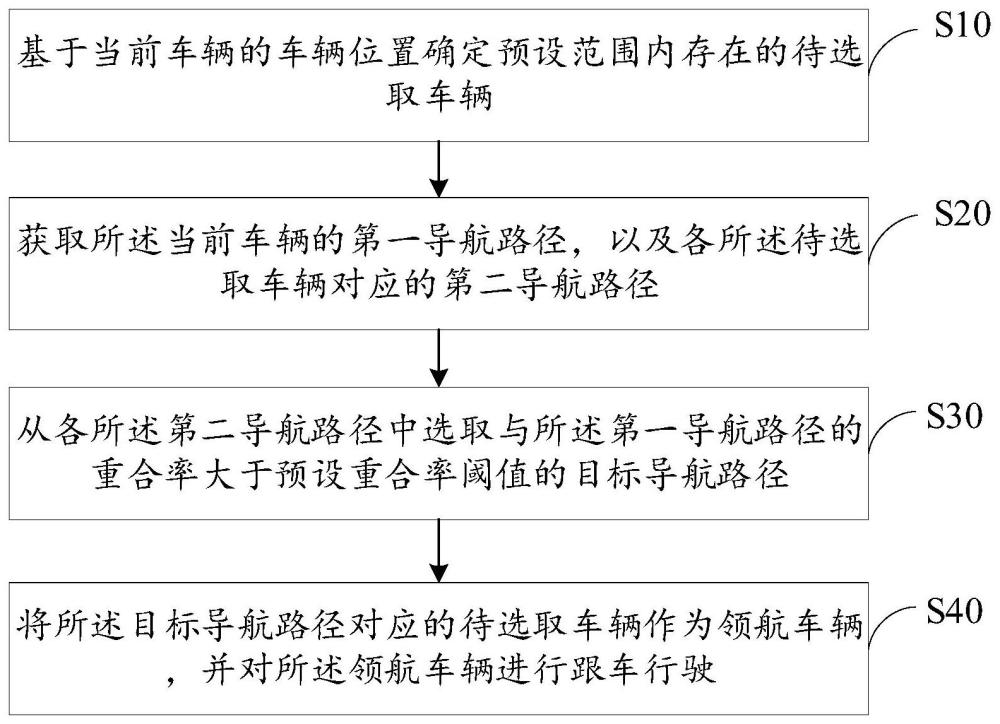
3、基于当前车辆的车辆位置确定预设范围内存在的待选取车辆;
4、获取所述当前车辆的第一导航路径,以及各所述待选取车辆对应的第二导航路径;
5、从各所述第二导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径;
6、将所述目标导航路径对应的待选取车辆作为领航车辆,并对所述领航车辆进行跟车行驶。
7、可选地,所述对所述领航车辆进行跟车行驶的步骤,包括:
8、获取所述领航车辆的领航车速,并根据所述领航车速确定所述当前车辆与所述领航车辆之间的安全跟车车距;
9、根据所述安全跟车车距将所述当前车辆的当前车速调整至所述领航车速,对所述领航车辆进行跟车行驶。
10、可选地,所述对所述领航车辆进行跟车行驶的步骤之后,还包括:
11、采集所述领航车辆的刹车灯工作状态;
12、在所述刹车灯工作状态为点亮状态时,进行制动,以降低所述当前车辆的当前车速。
13、可选地,所述对所述领航车辆进行跟车行驶的步骤之后,还包括:
14、采集所述领航车辆的转向灯工作状态;
15、在所述转向灯工作状态为点亮状态时,确定所述领航车辆的转向方向;
16、获取所述领航车车辆的横向移动速度,并按照所述横向移动速度以及所述转向方向进行转向。
17、可选地,所述获取所述领航车车辆的横向移动速度的步骤之后,还包括:
18、基于所述当前车辆的车辆位置确定所述转向方向所存在的风险车辆;
19、获取所述风险车辆的行车车速,以及所述当前车辆与所述风险车辆之间的行车车距;
20、基于所述当前车速、所述行车车速以及所述行车车距确定转向允许时长;
21、根据所述横向移动速度确定所述当前车辆的转向所需时长,并在所述转向允许时长超出所述转向所需时长时,执行所述按照所述横向移动速度以及所述转向方向进行转向的步骤。
22、可选地,所述基于当前车辆的车辆位置确定预设范围内存在的待选取车辆的步骤,包括:
23、基于当前车辆的车辆位置确定预设范围内的当前存在车辆;
24、在所述当前存在车辆存在于所述预设范围内的时长达到预设存在时长时,将所述当前存在车辆作为待选取车辆。
25、可选地,所述从各所述第二导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径的步骤,包括:
26、获取各所述第二导航路径对应的起始导航距离,并基于所述起始导航距离和预设导航距离阈值对各所述第二导航路径进行筛选;
27、从各筛选后的导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径。
28、此外,为实现上述目的,本发明还提出一种同路跟车装置,所述装置包括:
29、车辆确定模块,用于基于当前车辆的车辆位置确定预设范围内存在的待选取车辆;
30、路径获取模块,用于获取所述当前车辆的第一导航路径,以及各所述待选取车辆对应的第二导航路径;
31、路径选取模块,用于从各所述第二导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径;
32、跟车行驶模块,用于将所述目标导航路径对应的待选取车辆作为领航车辆,并对所述领航车辆进行跟车行驶。
33、此外,为实现上述目的,本发明还提出一种同路跟车设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的同路跟车程序,所述同路跟车程序配置为实现如上文所述的同路跟车方法的步骤。
34、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有同路跟车程序,所述同路跟车程序被处理器执行时实现如上文所述的同路跟车方法的步骤。
35、本发明提供了一种同路跟车方法、装置、设备及存储介质,该方法通过基于当前车辆的车辆位置确定预设范围内存在的待选取车辆;获取所述当前车辆的第一导航路径,以及各所述待选取车辆对应的第二导航路径;从各所述第二导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径;将所述目标导航路径对应的待选取车辆作为领航车辆,并对所述领航车辆进行跟车行驶。由于本发明先确定当前车辆的预设范围内存在的待选取车辆,并获取当前车辆的第一导航路径以及各待选取车辆的第二导航路径,从各第二导航路径中选取与第一导航路径的重合率大于预设重合率阈值的导航路径作为目标导航路径,再将目标导航路径对应的待选取车辆作为领航车辆进行跟车行驶,相比于现有的若领航车辆的行车路线与当前的行车路线不一致或短暂一致时,需要用户频繁切换领航车辆,操作较为繁琐,本发明可将与当前车辆的第一导航路径重合率大于预设重合率阈值的车辆作为领航车辆,无需用户频繁切换领航车辆,操作简单。
技术特征:
1.一种同路跟车方法,其特征在于,所述方法包括以下步骤:
2.如权利要求1所述的同路跟车方法,其特征在于,所述对所述领航车辆进行跟车行驶的步骤,包括:
3.如权利要求2所述的同路跟车方法,其特征在于,所述对所述领航车辆进行跟车行驶的步骤之后,还包括:
4.如权利要求2所述的同路跟车方法,其特征在于,所述对所述领航车辆进行跟车行驶的步骤之后,还包括:
5.如权利要求4所述的同路跟车方法,其特征在于,所述获取所述领航车车辆的横向移动速度的步骤之后,还包括:
6.如权利要求1所述的同路跟车方法,其特征在于,所述基于当前车辆的车辆位置确定预设范围内存在的待选取车辆的步骤,包括:
7.如权利要求1至6中任一项所述的同路跟车方法,其特征在于,所述从各所述第二导航路径中选取与所述第一导航路径的重合率大于预设重合率阈值的目标导航路径的步骤,包括:
8.一种同路跟车装置,其特征在于,所述装置包括:
9.一种同路跟车设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的同路跟车程序,所述同路跟车程序配置为实现如权利要求1至7中任一项所述的同路跟车方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有同路跟车程序,所述同路跟车程序被处理器执行时实现如权利要求1至7任一项所述的同路跟车方法的步骤。
技术总结
本发明涉及自动驾驶技术领域,公开了一种同路跟车方法、装置、设备及存储介质,该方法包括:基于当前车辆的车辆位置确定预设范围内存在的待选取车辆;获取当前车辆的第一导航路径,以及各待选取车辆对应的第二导航路径;从各第二导航路径中选取与第一导航路径的重合率大于预设重合率阈值的目标导航路径;将目标导航路径对应的待选取车辆作为领航车辆,并对领航车辆进行跟车行驶。相比于现有的若领航车辆的行车路线与当前的行车路线不一致或短暂一致时,需要用户频繁切换领航车辆,操作较为繁琐,本发明可将与当前车辆的第一导航路径重合率大于预设重合率阈值的车辆作为领航车辆,无需用户频繁切换领航车辆,操作简单。
技术研发人员:郑福民,陈林辉,许东春,廖正凯,侯立升
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!