机车扭矩控制方法、装置、设备及存储介质与流程
本发明涉及机车驱动,尤其涉及一种机车扭矩控制方法、装置、设备及存储介质。
背景技术:
1、由于工程机械设备使用的路面大多比较颠簸,而且工程机械设备的承载结构大多是刚性结构,除了轮胎之外,没有很好的路面减震系统。因此在车辆行走经过颠簸路面时,整机会颠簸,导致驾驶员的脚也会不受控制的上下抖动,从而导致油门信号波动,油门信号波动会引起驱动扭矩的波动,扭矩的波动会进一步放大车速的抖动,导致驾驶舒适性变差,操控性不好等不良后果。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种机车扭矩控制方法、装置、设备及存储介质,旨在解决现有的机车扭矩控制方式容易导致油门信号波动从而引起驱动扭矩的波动进而降低机车的操控性与驾驶舒适性的技术问题。
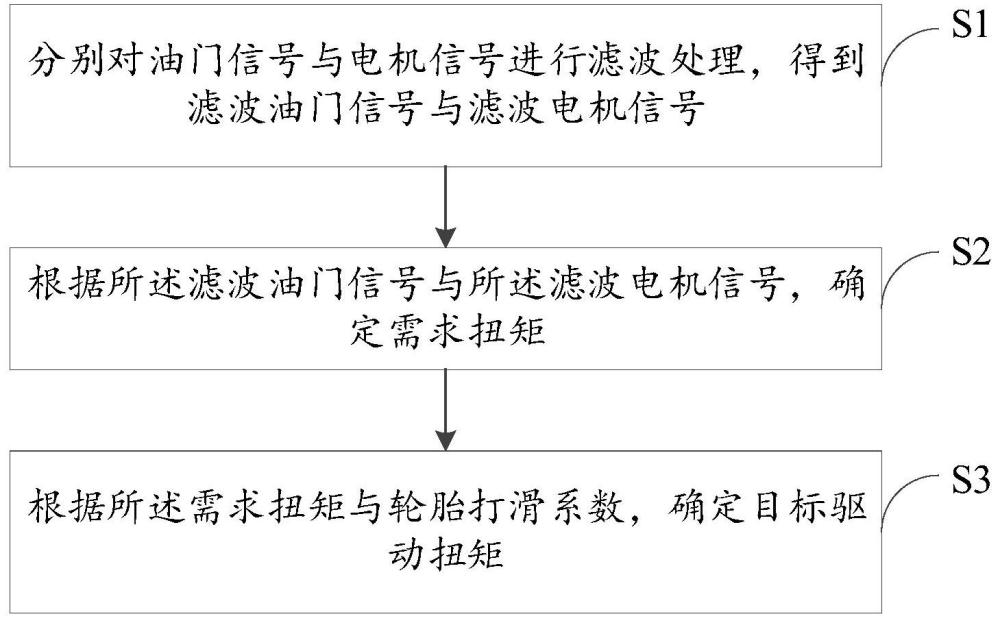
2、为实现上述目的,本发明提供了一种机车扭矩控制方法,所述方法包括以下步骤:
3、分别对油门信号与电机信号进行滤波处理,得到滤波油门信号与滤波电机信号;
4、根据所述滤波油门信号与所述滤波电机信号,确定需求扭矩;
5、根据所述需求扭矩与轮胎打滑系数,确定目标驱动扭矩。
6、可选地,在所述分别对油门信号与电机信号进行滤波处理,得到滤波油门信号与滤波电机信号之前,还包括:
7、根据预设时间间隔中信号的变化量,确定对应时间中所述油门信号与所述电机信号的变化趋势,其中,所述变化趋势包括平稳、上升与下降;
8、若所述变化趋势为上升或下降,分别判断所述油门信号与所述电机信号的震荡次数与震荡幅度是否都超过预设震荡标准;
9、若都超过,分别将所述油门信号与所述电机信号作为待滤波油门信号与待滤波电机信号。
10、可选地,所述分别对油门信号与电机信号进行滤波处理,得到滤波油门信号与滤波电机信号,包括:
11、分别获取所述油门信号与所述电机信号的波峰值与波谷值;
12、基于所述油门信号的波峰值与波谷值的平均值,确定所述滤波油门信号;
13、基于所述电机信号的波峰值与波谷值的平均值,确定所述滤波电机信号。
14、可选地,所述根据所述滤波油门信号与所述滤波电机信号,确定需求扭矩,包括:
15、根据所述滤波油门信号与电机特性曲线,确定扭矩比例;
16、根据所述滤波电机信号与所述电机特性曲线,确定最大扭矩;
17、将所述扭矩比例与所述最大扭矩的乘积作为所述需求扭矩。
18、可选地,在所述根据所述需求扭矩与轮胎打滑系数,确定目标驱动扭矩之前,还包括:
19、基于所述电机特性曲线,将所述滤波电机信号转换为输出扭矩;
20、根据所述输出扭矩与动力学方程,确定理论车速与加速积分车速;
21、将所述理论车速与所述加速积分车速的差值作为打滑速度,并将所述打滑速度与所述理论车速的比值作为所述轮胎打滑系数。
22、可选地,所述根据所述需求扭矩与轮胎打滑系数,确定目标驱动扭矩,包括:
23、获取温度信息、转速信息、故障信息与误操作信息并作为保护信息;
24、判断所述保护信息是否超过预设保护标准;
25、若超过,基于所述电机特性曲线,将对应的所述保护信息转换为保护扭矩,并根据所述保护扭矩、所述需求扭矩与所述轮胎打滑系数,确定所述目标驱动扭矩;
26、若不超过,根据所述需求扭矩与所述轮胎打滑系数,确定所述目标驱动扭矩。
27、可选地,在所述根据所述需求扭矩与轮胎打滑系数,确定目标驱动扭矩之后,还包括:
28、实时获取坡度斜率,根据所述坡度斜率与所述电机特性曲线确定坡度作用力;
29、基于所述坡度作用力与所述动力学方程,对所述机车扭矩进行重调。
30、此外,为实现上述目的,本发明还提出一种机车扭矩控制装置,所述机车扭矩控制装置包括:
31、滤波模块,用于分别对油门信号与电机信号进行滤波处理,得到滤波油门信号与滤波电机信号;
32、需求扭矩模块,用于根据所述滤波油门信号与所述滤波电机信号,确定需求扭矩;
33、目标扭矩模块,用于根据所述需求扭矩与轮胎打滑系数,确定目标驱动扭矩。
34、可选地,所述滤波模块,还用于根据预设时间间隔中信号的变化量,确定对应时间中所述油门信号与所述电机信号的变化趋势,其中,所述变化趋势包括平稳、上升与下降;若所述变化趋势为上升或下降,分别判断所述油门信号与所述电机信号的震荡次数与震荡幅度是否都超过预设震荡标准;若都超过,分别将所述油门信号与所述电机信号作为待滤波油门信号与待滤波电机信号。
35、可选地,所述滤波模块,还用于分别获取所述油门信号与所述电机信号的波峰值与波谷值;基于所述油门信号的波峰值与波谷值的平均值,确定所述滤波油门信号;基于所述电机信号的波峰值与波谷值的平均值,确定所述滤波电机信号。
36、可选地,所述需求扭矩模块,还用于根据所述滤波油门信号与电机特性曲线,确定扭矩比例;根据所述滤波电机信号与所述电机特性曲线,确定最大扭矩;将所述扭矩比例与所述最大扭矩的乘积作为所述需求扭矩。
37、可选地,所述目标扭矩模块,还用于基于所述电机特性曲线,将所述滤波电机信号转换为输出扭矩;根据所述输出扭矩与动力学方程,确定理论车速与加速积分车速;将所述理论车速与所述加速积分车速的差值作为打滑速度,并将所述打滑速度与所述理论车速的比值作为所述轮胎打滑系数。
38、可选地,所述目标扭矩模块,还用于获取温度信息、转速信息、故障信息与误操作信息并作为保护信息;判断所述保护信息是否超过预设保护标准;若超过,基于所述电机特性曲线,将对应的所述保护信息转换为保护扭矩,并根据所述保护扭矩、所述需求扭矩与所述轮胎打滑系数,确定所述目标驱动扭矩;若不超过,根据所述需求扭矩与所述轮胎打滑系数,确定所述目标驱动扭矩。
39、可选地,所述目标扭矩模块,还用于实时获取坡度斜率,根据所述坡度斜率与所述电机特性曲线确定坡度作用力;基于所述坡度作用力与所述动力学方程,对所述机车扭矩进行重调。
40、此外,为实现上述目的,本发明还提出一种机车扭矩控制设备,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机车扭矩控制程序,所述机车扭矩控制程序配置为实现如上文所述的机车扭矩控制方法的步骤。
41、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有机车扭矩控制程序,所述机车扭矩控制程序被处理器执行时实现如上文所述的机车扭矩控制方法的步骤。
42、本发明通过分别对油门信号与电机信号进行滤波处理,得到滤波油门信号与滤波电机信号;然后根据滤波油门信号与滤波电机信号,确定需求扭矩;最后根据需求扭矩与轮胎打滑系数,确定目标驱动扭矩。由于本发明是根据滤波后的油门信号与电机信号来进行扭矩的决策,当机车经过颠簸路面,驾驶员的脚出现上下颠簸时,由于油门信号经过滤波处理,会输出一个较平稳的数值,防止路面和油门扭矩都在震荡,提升了车辆的舒适性和操控性能,同时,电机信号也经过滤波处理,过滤掉了传动链的抖动或者车速抖动引起扭矩震荡,提升了车辆的舒适性和操控性能。
- 还没有人留言评论。精彩留言会获得点赞!