一种可收纳式轮组件及机器人的制作方法
本申请涉及机器人,尤其涉及一种可收纳式轮组件及机器人。
背景技术:
1、对于轮式移动机器人(amr)来说,驱动轮是至关重要的执行组件。
2、驱动轮组件因为要经常在地面移动,因此轮胎的磨损、清洁和防护问题很大程度上影响了其应用场景。对于一些与用户经常进行接触式互动的机器人类型,例如宠物机器人、陪伴机器人等,其轮胎部位与用户的直接接触容易对用户带来脏污的困扰。而在机器人在不工作或静止状态时,其外露的轮胎和执行器件也经常面临老化和被外力损坏的风险。
3、目前,大部分电动交通工具和轮式移动机器人的驱动轮组件动力输出采用普通内转子齿槽电机+减速箱+传动机构的形式,方案成熟但集成化程度低,难以适应越来越紧凑的底盘布局需求。
4、近些年来随着电机设计和电控方案的成熟,轮边电机和轮毂电机得到越来越广泛的应用。
5、轮边电机通过轮边减速器将动力传递至驱动轮,效率高、成本低,但无法在小直径驱动轮上应用。
6、轮毂电机分为直驱式轮毂电机和减速轮毂电机。直驱式轮毂电机的外转子即为轮毂本身,省去了传动结构,效率很高,但直驱方案推重比较低,不利于系统轻量化,电机和驱动的工作转速需要兼容低速区间,开发上有一定难度。减速轮毂电机采用外转子或内转子电机+齿轮箱的方式,降低了电机的低速设计和控制难度,但目前大部分减速轮毂电机尺寸较大,不适用于轻小型的机器人应用。
7、同时,机器人的感知功能十分重要,其中避障、防跌落等功能对实时性和准确性要求很高。而大部分轮式移动机器人的相关传感器与驱动轮组件并未集成在一起,需要底盘控制器进行协同控制,模块化程度较低。
8、对于不同形式的底盘,传感器的布局需要兼顾感知范围和精度的需求,轮系布局则需要根据底盘总体自由度、静态和动态稳定性、悬挂结构来实现。两个部分需要单独设计并综合考虑。
技术实现思路
1、本申请提供了一种可收纳式轮组件及机器人,解决了对于一些与用户经常进行接触式互动的机器人类型,其轮胎部位与用户的直接接触容易对用户带来脏污的困扰,而在机器人在不工作或静止状态时,其外露的轮胎和执行器件也经常面临老化和被外力损坏风险的技术问题。
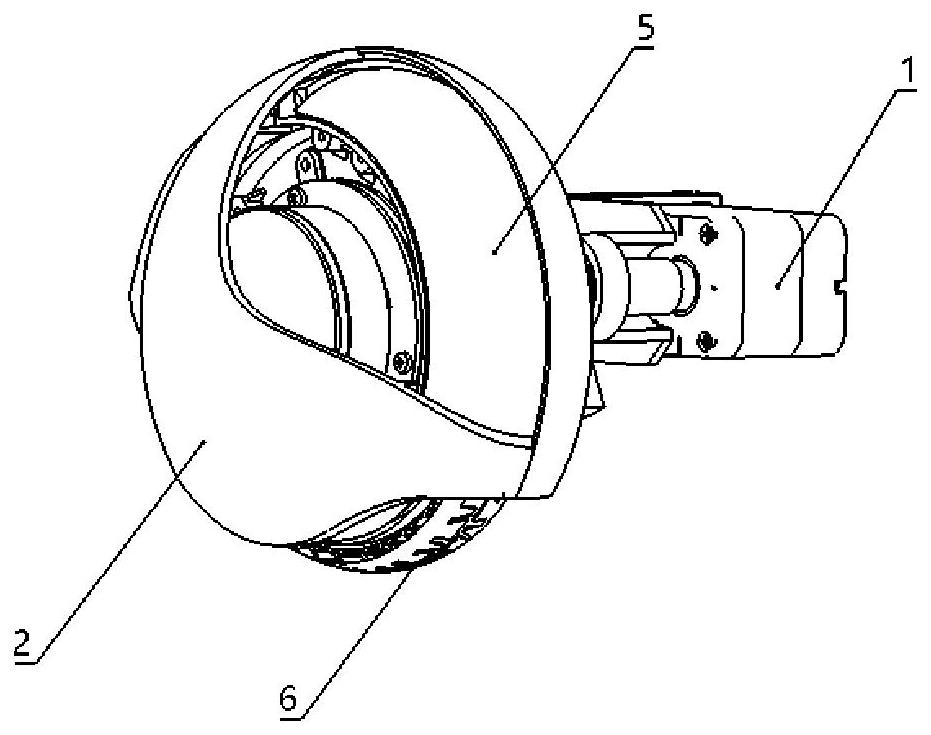
2、有鉴于此,本申请第一方面提供了一种可收纳式轮组件,包括:
3、第一动力件;
4、与所述第一动力件的输出轴通过支撑支架的第一轴承铰接的第一可旋转壳体,所述支撑支架上还设置有第一齿轮,所述第一可旋转壳体设置有使轮组件暴露的开口;
5、所述轮组件包括第二动力件以及固定壳体,所述第二动力件通过所述固定壳体与所述第一可旋转壳体的内侧固定连接;
6、与所述第一可旋转壳体的内侧通过第二轴承以及第二齿轮铰接连接的第二可旋转壳体,所述第二齿轮与所述第一齿轮构成行星轮系,所述第二可旋转壳体与所述开口的形状匹配,所述第二可旋转壳体设置于所述轮组件外侧;
7、当所述第一动力件的输出轴带动所述第一可旋转壳体沿第一方向旋转时,与所述第一可旋转壳体的内侧固定连接的所述第二动力件沿所述第一方向旋转抬起或旋转放下,与所述第一可旋转壳体的内侧铰接的所述第二可旋转壳体沿第二方向旋转,使得所述第二可旋转壳体覆盖所述开口或暴露所述开口,其中,所述第一方向与所述第二方向相反。
8、可选地,所述第二动力件具体包括:
9、外轮毂、轮毂电机、行星齿轮组以及第三可旋转壳体;
10、所述外轮毂通过第三轴承与所述行星齿轮组的行星轮铰接;
11、所述轮毂电机的输出轴与所述行星齿轮组的中心轮固定连接;
12、所述第三可旋转壳体与所述外轮毂固定连接,且所述外轮毂通过第四轴承分别与所述行星齿轮组的齿圈以及所述固定壳体铰接。
13、可选地,所述第一可旋转壳体包括内壳体以及外壳体;
14、所述内壳体与所述外壳体可拆卸式连接;
15、所述内壳体与所述第一动力件的输出轴通过支撑支架的第一轴承铰接。
16、可选地,还包括避障传感器;
17、所述避障传感器固定设置于所述第一可旋转壳体的外侧。
18、可选地,还包括防跌落传感器;
19、所述防跌落传感器固定设置于所述第一可旋转壳体的外侧。
20、可选地,所述轮毂电机具体为无刷外转子形式电机。
21、可选地,所述轮毂电机内置转速计。
22、可选地,所述避障传感器分别与所述第二动力件以及底盘控制器通信连接。
23、可选地,所述防跌落传感器分别与所述第二动力件以及底盘控制器通信连接。
24、本申请第二方面提供一种机器人,所述机器人包括:本申请第一方面任意一项所述的可收纳式轮组件。
25、从以上技术方案可以看出,本申请实施例具有以下优点:
26、本申请中,提供了一种可收纳式轮组件及机器人,通过第一动力件的输出轴带动第一可旋转壳体沿第一方向旋转,使得与第一可旋转壳体的内侧固定连接的第二动力件沿第一方向旋转抬起或旋转放下,与第一可旋转壳体的内侧铰接的第二可旋转壳体沿第二方向旋转,实现第二可旋转壳体覆盖或暴露第一可旋转壳体的开口,将轮组件遮蔽或暴露,解决了对于一些与用户经常进行接触式互动的机器人类型,其轮胎部位与用户的直接接触容易对用户带来脏污的困扰,而在机器人在不工作或静止状态时,其外露的轮胎和执行器件也经常面临老化和被外力损坏风险的技术问题。
技术特征:
1.一种可收纳式轮组件,其特征在于,包括:
2.根据权利要求1所述的可收纳式轮组件,其特征在于,所述第二动力件具体包括:
3.根据权利要求1所述的可收纳式轮组件,其特征在于,所述第一可旋转壳体包括内壳体以及外壳体;
4.根据权利要求1所述的可收纳式轮组件,其特征在于,还包括避障传感器;
5.根据权利要求1所述的可收纳式轮组件,其特征在于,还包括防跌落传感器;
6.根据权利要求2所述的可收纳式轮组件,其特征在于,所述轮毂电机具体为无刷外转子形式电机。
7.根据权利要求2所述的可收纳式轮组件,其特征在于,所述轮毂电机内置转速计。
8.根据权利要求4所述的可收纳式轮组件,其特征在于,所述避障传感器分别与所述第二动力件以及底盘控制器通信连接。
9.根据权利要求5所述的可收纳式轮组件,其特征在于,所述防跌落传感器分别与所述第二动力件以及底盘控制器通信连接。
10.一种机器人,其特征在于,包括权利要求1至9任意一项所述的可收纳式轮组件。
技术总结
本申请公开了一种可收纳式轮组件及机器人,通过第一动力件的输出轴带动第一可旋转壳体沿第一方向旋转,使得与第一可旋转壳体的内侧固定连接的第二动力件沿第一方向旋转抬起或旋转放下,与第一可旋转壳体的内侧铰接的第二可旋转壳体沿第二方向旋转,实现第二可旋转壳体覆盖或暴露第一可旋转壳体的开口,将轮组件遮蔽或暴露,解决了对于一些与用户经常进行接触式互动的机器人类型,其轮胎部位与用户的直接接触容易对用户带来脏污的困扰,而在机器人在不工作或静止状态时,其外露的轮胎和执行器件也经常面临老化和被外力损坏风险的技术问题,同时,本申请的可收纳式轮组件集驱动、感知和控制功能,模块化程度高。
技术研发人员:杨梦琳,魏强,贾宝锁,尚永亮,李宏伟
受保护的技术使用者:北京萌友智能科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!