一种自主识别靠标停车困难特殊站的方法与流程
本发明属于轨道交通领域,特别涉及一种自主识别靠标停车困难特殊站的方法。
背景技术:
1、ctcsn(新型中国列车运行控制系统,chinese train control system new)是中国国家铁路集团有限公司组织研发的新型列控系统,与当前主流列控系统相比,其采用了移动闭塞、北斗定位、5g通信等新技术,适用于需要改造提升运能的货运线路。但在改造既有货运线路时,存在一些困难,由于部分历史上形成的普速站的股道过短,列控系统以出站信号机(或轨道尽头)为停车点,但在实际应用中会额外增加一段固定的防护距离和定位误差之后,会出现列车没有到停车标就被列控系统拦停的情况,该现象在轨道交通领域被称为“靠标困难”。
2、对于“靠标困难”,现有的列车运行监控装置(简称lkj)的解决方案为:在lkj数据中预先设置名为“靠标停车困难特殊站”的车站,在名为“靠标停车困难特殊车站”的车站停车时,对于停车标距出站信号机小于规定距离的股道,在运行速度低于20km/h、lkj显示距离距出站信号机小于200m时,按压解锁键,lkj监控列车以不超过20km/h的速度靠标停车,解锁操作后不得使用两段制动,以实现靠标停车。
3、当前新型列控系统可以通过缩短额外防护距离、修改制动曲线策略、使用开口速度监控等方法进行靠标,但新型列控系统在列车数据(电子地图)中没有预先设置“靠标停车困难特殊站”的车站,因此需要提出一种识别前方接车站是否是“靠标停车困难特殊车站”的方法。
技术实现思路
1、本发明的目的在于当列车数据(电子地图)中没有预先设置“靠标停车困难特殊站”的车站时,提供一种自主识别“靠标停车困难特殊站”的方法,以提高列控系统在既有线路上的适应能力,进一步增强运输效率和行车安全。
2、为实现上述目的,本发明提供一种自主识别靠标停车困难特殊站的方法,其包含:基于列车当前连接的lrbg的位置,获得列车定位所在当前车站的电子地图信息,沿列车运行方向在所述电子地图信息中搜索信号设备,将信号设备的搜索结果存储至信号设备列表中形成signal_list;根据列车当前行车许可信息ma,计算ma终点在signal_list中的位置p_ma;根据ma终点在signal_list中的位置p_ma,结合所述电子地图信息中的轨道区段信息,判断ma终点是否位于当前车站内;若ma终点位于当前车站内,比较列车长度l_train和靠标停车固定配置长度l_config之和的长度与ma终点所在轨道区段长度l_track的大小;若l_train+l_config<l_track,则认为ma终点所在的当前车站为“靠标停车困难特殊站”。
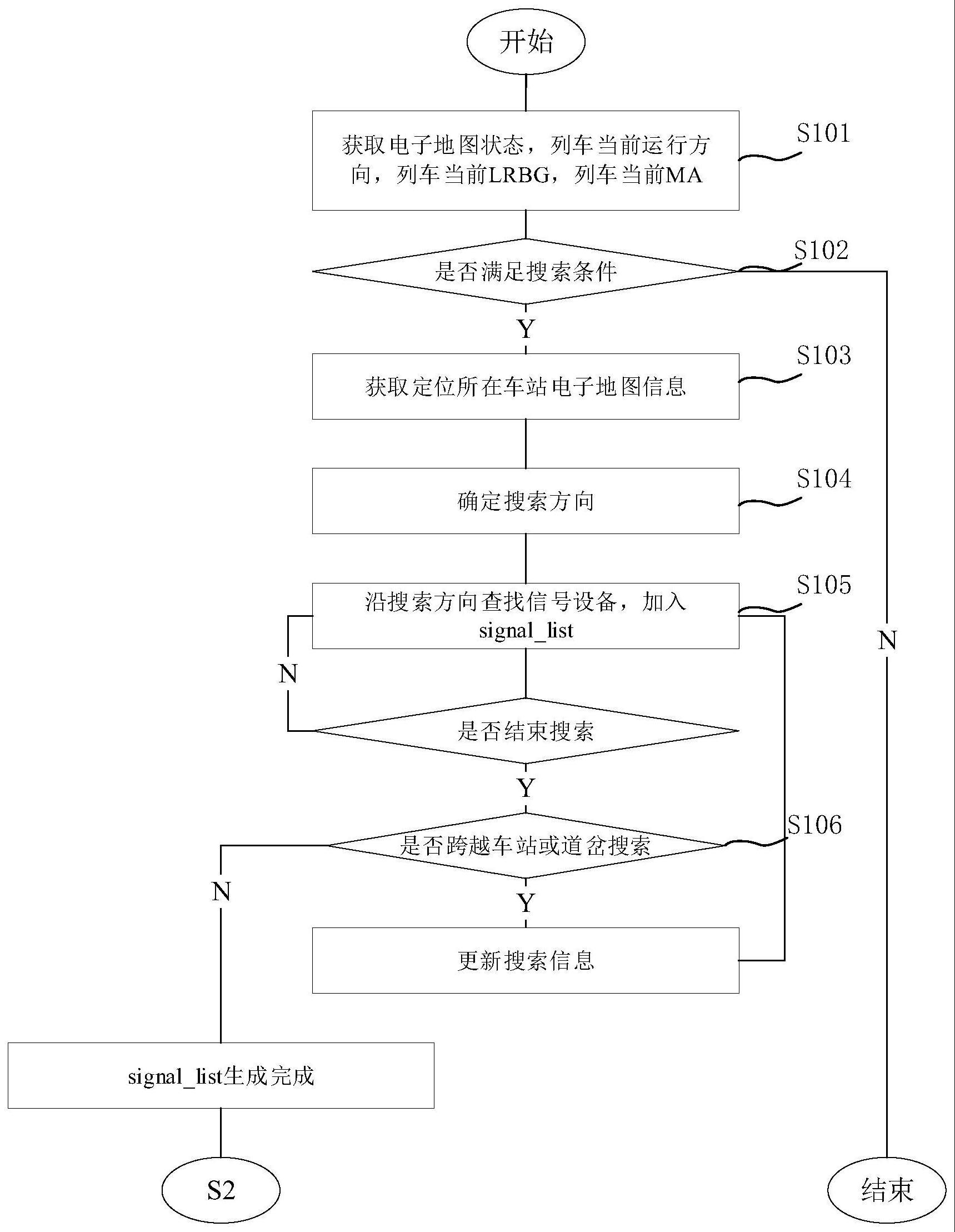
3、优选的,所述signal_list的建立,其特征在于,包括如下步骤:步骤s101、获取电子地图状态、列车当前运行方向、列车当前连接的lrbg以及列车当前行车许可信息ma;步骤s102、判断步骤s101中获取的电子地图状态、列车当前运行方向、列车当前连接的lrbg以及列车当前行车许可信息ma是否满足搜索条件,若满足则执行步骤s103,若不满足则结束signal_list的建立;步骤s103、根据列车当前连接的lrbg的位置从电子地图数据库中获取列车定位所在当前车站station[k]的电子地图信息;步骤s104、确定搜索方向,所述搜索方向沿列车运行方向;步骤105、在所述电子地图信息中遍历所有信号设备,将沿搜索方向的信号设备作为搜索结果存储至所述signal_list中。
4、优选的,步骤s102所述搜索条件的判断内容包括:条件1、电子地图状态是否有效;条件2、列车当前运行方向是否已知;条件3、列车当前lrbg是否有效;条件4、列车当前ma是否有效;若不满足上述条件1~条件4中的任一项则停止搜索。
5、优选的,所述当前车站station[k]的电子地图信息包括车站起终点位置信息、轨道区段信息和布置在各轨道区段上的信号设备信息,各个信号设备信息以列表方式存储。
6、优选的,所述signal_list包含的信号设备包括车站起始数据边界、车站结束数据边界、道岔、lrbg、信号机、股道;所述signal_list中信号设备属性包含信号设备类型、信号设备的位置、信号设备所在车站的站号、信号设备所在轨道的轨道区段、信号设备编号、信号设备的名称、信号设备的方向、信号设备的状态。
7、优选的,若当前车站中存在道岔,则执行步骤s106;步骤s106包括:根据道岔状态信息,获得道岔状态处于定位或反位,并在定位或反位对应的轨道区段上的信号设备进行搜索。
8、优选的,若需要跨越车站进行信号设备的搜索,则根据所述车站起终点位置信息,获得搜索方向上的相邻车站的站号;再根据该相邻车站的站号从电子地图数据库中获取该相邻车站的相邻电子地图信息,在该相邻电子地图信息中继续进行搜索。
9、优选的,所述计算ma终点在signal_list中的位置p_ma包括如下步骤:
10、步骤s201、遍历signal_list中的每一个信号设备,其中signal_list中的首个信号设备是列车当前连接的lrbg,从列车当前连接的lrbg开始,依次计算signal_list中两个相邻信号设备之间的距离l[k],计算公式如下:
11、l[k]=signal_list[k].position-signal_list[k-1].position
12、其中,signal_list[k].position为第k个信号设备的位置,signal_list[k-1].position为第k-1个信号设备的位置,k为自然数;
13、步骤s202、比较列车许可行进长度l_ma与相邻两个信号设备之间的距离l[k],若l_ma<=l[k],则说明ma终点位置在signal_list[k]和signal_list[k-1]两个信号设备之间,获得ma终点在signal_list中的位置p_ma,所述位置p_ma位于signal_list[k]在signal_list的位置和signal_list[k-1]在signal_list的位置之间,执行步骤s203;
14、步骤s203、将ma终点的位置p_ma插入signal_list中。
15、优选的,若l_ma>l[k],说明ma终点位置不在signal_list[k]和signal_list[k-1]两个信号设备之间,则返回步骤s201,计算下一个两个相邻信号设备之间的距离l[k+1]。
16、优选的,所述判断ma终点是否位于当前车站内,包括如下步骤:步骤s301、在signal_list中查找第k个信号设备signal_list[k]和第k-1个信号设备signal_list[k-1]所属轨道区段,如果两者处于相同的轨道区段,则将该轨道区段作为ma终点所在轨道区段,执行步骤s302;步骤s302、根据步骤s301得到ma终点所在轨道区段对应车站的站号,与ma终点所在车站的站号进行判断,若车站的站号相等,则说明ma终点所在轨道区段是站内轨道区段;若车站的站号不相等,则说明ma终点所在轨道区段不是站内轨道区段,说明该ma终点不在当前车站内,结束判断。
17、优选的,判断所述ma终点所在站是否为“靠标停车困难特殊站”包括如下步骤:步骤s401、获取列车长度l_train、ma终点所在轨道区段长度l_track、靠标停车固定配置长度l_config;步骤s402、判断列车长度l_train与靠标停车固定配置长度l_config之和是否小于ma终点所在轨道区段长度l_track;如果l_train+l_config<l_track,则认为ma终点所在车站为“靠标停车困难特殊站”;如果l_train+l_config≥l_track,则认为ma终点所在车站不是“靠标停车困难特殊站”。
18、优选的,所述列车长度l_train由列车司机输入;所述ma终点所在轨道区段长度l_track从电子地图信息中读取获得;所述靠标停车固定配置长度l_config根据具体的列车靠标策略、制动性能、防护距离、车站数据信息确定,并配置在列车数据中。
19、综上所述,与现有技术相比,本发明提供的自主识别靠标停车困难特殊站的方法,具有如下有益效果:
20、1、本方法可以适配没有在数据中预先设置“靠标停车困难特殊站”的列控系统,自主判断靠标停车困难特殊站,具有广泛的适应性;
21、2、本方法可以根据不同车长、靠标策略、制动距离、防护距离、车站数据等不同条件,动态判断是否存在靠标停车困难的情况,增强灵活性,提高运输效率;
22、3、本方法可以根据ma自主判断停车点是否位于站内,然后判断是否是“靠标停车困难特殊站”,避免ma终点位于站外时,或者ma终点是前车防护区段,错误地执行靠标策略,保证靠标停车策略的安全性;
23、4、本方法不需要司机进行解锁操作,在满足条件时,自动执行靠标停车策略,能够简化司机操作流程,提高易用性,同时避免司机误操作,提高安全性。
- 还没有人留言评论。精彩留言会获得点赞!