盲点检测系统的制作方法
1.本主题涉及车辆。更具体地,本主题涉及在车辆中的盲点检测器。
背景技术:
2.已经开发了盲点检测器以检测车辆或其他物体在骑乘者的盲点中的存在。骑乘者的盲点是指使用车辆内部和车辆外部后视镜通常无法观察到物体的车辆的部分。通过检测骑乘者的盲点中的物体的存在,盲点检测器有助于协助骑乘者在预期车道变化等情况下对车辆周围环境进行预防性操纵评估。已知的盲点检测器包括主动和被动红外检测器、光学检测器、基于雷达的检测器等。
附图说明
3.参考附图进行详细描述。在所有附图中使用相同的附图标记来指代相同的特征和部件。
4.图1是根据本发明的一个实施例的鞍座式车辆的右侧视图。
5.图2是根据本发明的一个实施例的用于盲点检测系统的框图。
6.图2a是根据本发明的一个实施例的具有盲点区域的车辆的俯视图。
7.图2b是根据本发明的一个实施例的具有盲点传感器的车辆的俯视图。
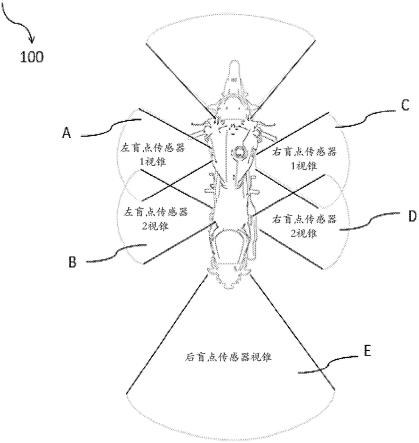
8.图2c是根据本发明的一个实施例的具有盲点传感器视觉锥体的鞍座式车辆的俯视图。
9.图2d是根据本发明的一个实施例的具有盲点传感器视觉锥体的鞍座式车辆的俯视图。
10.图2e是根据本发明的一个实施例的关于位置区域的传感器的预定范围。
11.图3是根据本发明的一个实施例的车辆视图。
12.图3a是根据本发明的一个实施例的以预定角度倾斜的车辆视图。
13.图3b是根据本发明的常规方法视图。
14.图3c是根据本发明的一个实施例的车辆倾斜期间的后盲点传感器视图。
15.图4是根据本发明的一个实施例的流程图。
具体实施方式
16.在现代交通条件下驾驶车辆是非常复杂和危险的任务。骑乘者必须了解所有迎面而来的道路危险和交通控制设备,包括停止的汽车、行人过马路和红灯。高速公路驾驶是一项危险的任务,既要注意迎面而来的道路危险,又要注意高速行驶时从后方或侧面驶来的车辆。这就大大减少了人脑观察物体、分析和处理信息并在瞬间做出所需决定的时间。在高速公路上安全地变道前,必须向侧方和后方观察。在变道之前,如果没有正确地向侧方和后方观察,就会导致严重的高速事故。此类事故经常造成严重的人身伤害或死亡。
17.驾驶事故的一个主要原因是骑乘者无法识别另一辆车靠近骑乘者的车辆,因此变
道不安全。对骑乘者来说,最难监控的区域是骑乘者的盲点。盲点主要归因于位于车辆上的后视镜所提供的覆盖空隙,以及位于骑乘者视线内的物体(例如车辆的一部分或在其上或其中运输的物体)所造成的视觉干扰。
18.传统上,对盲点的监控是由骑乘者从车辆的前向行驶方向转过头来直接观察有关的区域。这通常被执行以确定另一车辆是否接近骑乘者的车辆。为了骑乘者确定变道是否安全,骑乘者不仅必须确定盲点中是否有车辆,还必须确定车辆的大小及其相对速度。只有当骑乘者观察盲点和在盲点中的车辆一段时间(通常为几毫秒)时,才能完成这一点。通过将头部从行驶的前向方向转向并观察盲点,骑乘者可以减少在变道时与旁边的车辆发生事故的机会。然而,由于骑乘者没有持续观察车辆的前方的道路,所以骑乘者的车辆发生正面碰撞的可能性增加。
19.在这种情况下,迄今为止,位于挡风玻璃内侧、车辆侧面的后视镜是唯一被广泛接受的在四轮车的情况下检测骑乘者车辆侧面或后方的方法。在两轮车的情况下,后视镜通常位于把手组件上,用于检测在骑乘者的车辆侧面或后方的车辆。然而,比较在四轮车中的盲点区域和在两轮车中的盲点区域,两轮车具有更多盲点区域。同时,与四轮骑乘者相比,两轮骑乘者更容易发生事故。申请人已知的所有这样的后视镜都会在骑乘者不能检测附近车辆的地方留下至少一个盲点。例如,这些盲点通常存在于汽车的后挡泥板旁边、卡车的后轮旁边或者两轮车辆的两侧。有时,整辆汽车或者两轮车可能在骑乘者的车辆旁边行驶,即使骑乘者检查了他的后视镜后,也完全无法察觉。
20.此外,造成两轮车中的盲点的大部分原因包括在驾驶车辆时可以看到的主要前向视野。前向区域包括视距区和外围区。由于头盔的使用,作为最大视野区域的外围区域的视野在车辆的两侧减小的是很小的值。这种减少因头盔而异,主要取决于头盔设计。这反过来又增加了鞍座式车辆(例如两轮车辆)中的盲区。由于两轮车中的前向视野非常有限,因此需要一种消除各种盲点的系统。
21.因此,从上面提到的段落中清楚的是,车辆中的盲点已经对车辆的骑乘者的生命构成了威胁。在交通量大的发展中国家以及包含高速自行车的发达经济体,车辆中的盲点尤其给骑乘者带来了问题。发展中国家面临着严重的无管制交通的问题,这给车辆的骑乘者带来了安全风险。此外,车辆中的盲点留下了开放的非可视区域,即不在骑乘者的可视范围内的区域。同时,在该特定区域中,骑乘者不能从车辆的两侧或后侧看到接近的车辆。因此,针对该问题提出的一种方案是使用车辆中的后视镜。然而,在车辆转弯期间,盲点区域会发生变化,因此,具有后视镜也不能有效地工作。使用后视镜作为盲点检测器,驾驶员必须记住后视镜的位置、后视镜的形状和大小以及后视镜的方向。此外,由于在车辆倾斜或转弯期间,车辆的后视线并不固定,因此在那个时间点,后视镜也不会覆盖车辆的盲点。此外,还会出现其他问题,如在高速行驶时后视镜的振动,以及当骑乘者在高速行驶时,骑乘者可能没有足够的反应时间来避开障碍物,从而导致碰撞或事故。此外,以新手骑乘者为例,无论是在发展中国家还是在发达经济体的高速公路上,当新手骑乘者在密集的交通条件下骑行时,他们总是会感到恐惧/焦虑。因此,需要一种盲点检测系统,其检测车辆中的盲点,而不考虑车辆的侧面。
22.此外,用于检测盲点区域的另一个系统是主动和被动红外检测器、光学检测器、基于雷达的检测器等。盲点检测系统需要用户界面以通知用户物体在骑乘者的盲点区域中。
为了最有效,这样的用户界面应该是自然的,并向用户提供直观的警告。一种已知的技术方法是在通过盲点检测器保护的车辆的同一侧的外部后视镜上提供一系列指示灯。替代地,显示系统可以安装在汽车车厢内,但安装在邻近外部后视镜的支柱上。显示器在外/主后视镜上或附近的这种定位提供了与由盲点检测器覆盖的车辆的侧面的关联。骑乘者通常会扫视主后视镜,以进行任何预操纵评估。由于骑乘者和他的视觉在几分之一秒内处理大量信息,因此骑乘者可能会忽略与盲点指示器或后视镜相关的显示系统的指示,直到预操纵评估的后期。显示单元、车窗玻璃、顶蓬或镜子本身上的降水或道路灰尘可能会进一步降低对骑乘者指示的清晰度。
23.在现有技术中,公开了具有机械对准雷达的盲点检测系统。在机械装置的帮助下,雷达会随着车辆的倾斜角度的变化而改变其方向。这种配置能够克服与由于车辆的倾斜而导致的盲点区域的变化相关的问题的结果。然而,该配置仅限于检测在车辆的后侧的盲点区域。额外的问题例如,在车辆侧面的盲点区域仍然存在。
24.在另一现有技术中,雷达被放置在车辆的后部以监视后部盲点区域,并基于碰撞时间估计向骑乘者提供警报。该系统具有其自身的局限性,即盲点检测系统仅将在当车辆超过阈值速度时工作。因此,由于交通密集,这给车辆在道路上缓慢行驶带来了额外的问题。因为在这种情况下,所公开的盲点检测系统将不能检测接近的车辆,因此,这增加了骑乘者的安全风险。
25.此外,在另一现有技术中,相机放置在头盔的后侧,以提供在车辆的后部的道路交通的视图。在平视显示器的帮助下,头盔的面罩上的视图投射到骑乘者身上。所公开的检测盲点的方案具有其自身的局限性,例如,头盔通常不稳定,并且因此,在骑车时会给骑乘者带来问题。
26.此外,在另一现有技术中,具有广角的中央盲点镜安装在车辆的前方向上。然而,这解决了在车辆的后侧的盲点区域的问题。但是不覆盖在车辆中的侧面盲点区域。
27.因此,存在设计盲点检测系统的挑战,该盲点检测系统可以令人满意地覆盖覆盖车辆中的所有侧面并去除车辆中的盲点区域,从而增加了密集交通中的骑乘者安全性并克服了现有技术的所有问题。此外,还存在设计盲点检测系统的挑战,该系统可以与车速无关地工作。
28.因此,需要一种改进的盲点检测系统,其克服了所有上述问题和本领域已知的其他问题。
29.本主题公开了一种盲点检测系统,其具有传感器单元和警报指示单元,以确保从所有侧面覆盖车辆中的盲点区域,同时确保骑乘者的安全。
30.根据本发明的一个方面,公开了包括盲点检测系统的车辆。盲点检测系统包括具有盲点传感器、控制器和警报指示单元的传感器单元。此外,根据本发明的一个方面,盲点传感器定位成覆盖车辆的盲点区域,例如,在车辆的左侧的至少一个盲点传感器、在车辆的右侧的至少一个盲点传感器和在车辆的后侧的单个传感器。此外,根据本发明的一个方面,直流电源设备向在车辆中提供的盲点检测系统供电。
31.此外,根据本发明的一个方面,由于设置在车辆两侧的盲点传感器感知障碍物接近车辆,因此向控制器发送信号,其中系统根据飞行时间原理工作。飞行时间原理被定义为一种用于测量传感器和物体之间的距离的方法,该方法基于信号的发射和被物体反射后返
回传感器之间的时间差。因此,在这里,控制器在接收到来自盲点传感器的输出信号之后,计算检测到的车辆/障碍物的距离、速度和角度。如果车辆/障碍物落在车辆的盲点区域中,则控制器基于障碍物/车辆的存在向相应的警报指示单元(即,左侧或右侧指示单元)发送警报信号。因此,警报指示单元使用方向特定信息向骑乘者指示接近障碍物/车辆。该配置有助于骑乘者免受事故、碰撞等。如上所述的配置还覆盖车辆转弯或倾斜期间的盲点检测,从而确保骑乘者的安全。
32.以下段落进一步阐述了盲点检测系统的控制器所使用的方法。根据本发明的一个方面,当车辆启动时,控制器接收由位于车辆上的盲点传感器生成的关于接近或围绕车辆/障碍物的原始信号。随后,控制器分析从盲点传感器接收的原始信号。在分析所接收的关于接近或围绕车辆/障碍物的速度、距离和角度的原始信号之后,控制器决定接近车辆是否是障碍物。如果存在障碍物,控制器将进一步检查左、右和后盲点传感器的状态。如果障碍物被至少一个左盲点传感器检测到,则控制器通过适当的装置(例如,通过激活左警报指示器或碰撞单元的警报指示单元)向骑乘者发出警报。如果障碍物由至少一个右盲点传感器检测到,控制器通过激活右警报指示器或者碰撞单元向骑乘者发出警报。
33.如果由后盲点传感器检测到障碍物,则控制器分析障碍物是从车辆的后侧朝向车辆的左侧靠近还是从车辆的后侧朝向车辆的右侧靠近。如果其从左靠近,则左指示器单元持续闪烁以指示其存在。如果其从右靠近,则右指示器单元持续闪烁以指示其存在。在一些情况下,障碍物由左右盲点传感器以及后盲点传感器中的至少一个检测到,然后警报指示器的发光强度增加以指示更高的风险。类似地,如果在车辆的左侧和右侧都检测到障碍物,则两个警报指示器都将闪烁以指示在两侧上均存在障碍物。在一个实现中,警报指示单元也可以是视觉或音频警报。视觉警报可以是放置在车辆上的位置上的led指示器,该位置在骑乘鞍座式车辆(例如两轮车辆)时处于骑乘者的视野中。还可以利用音频指示器并将其放置在头盔内以提供基于语音的帮助。
34.此外,根据本发明的另一方面,盲点检测系统包含传感器单元、控制器、警报指示单元和开关。开关的位置为左右盲点传感器的使用提供了便利,骑乘者可以根据道路上的交通密度手动激活传感器。
35.在接下来的示例性方面中,车辆是两轮鞍座式车辆。然而,可以设想,本发明的概念可以应用于任何两轮、三轮和四轮类型的车辆。
36.本发明的各种其他特征在下文中参照附图以两轮车辆的实施例详细描述。在附图中,相同的附图标记通常指示相同的、功能相同的和/或结构上相同的元件。元素首次出现的附图通过相应的附图标记中最左边的数字表示。参考附图,其中,相同的附图标记将用于在多个视图中标识相同或相似的元件。参考附图进一步描述本主题。应当注意,说明书和附图仅解释了本主题的原理。可以设计各种布置,尽管这里没有明确描述或示出,但这些布置包括本主题的原理。此外,此处叙述本主题的原理、方面和实例的所有陈述以及其具体实例都旨在包含其等价物。
37.此外,在所示实施例的确保描述中所指的“前”和“后”,以及“左”和“右”是指在坐在鞍座式车辆的座椅上的状态下看到的前、后和左、右方向。此外,纵向轴线是指相对于车辆的前后轴线,而横向轴线是指相对于车辆的左右轴线。同时,应当理解的是,在此使用的措辞和术语是为了描述的目的,并且不应被视为限制。
38.图1是示例性鞍座式车辆的右侧视图。车辆(100)具有车架组件(未示出),其用作用于承载负载的骨架。仪表盘(119)安装在把手组件(126)上。把手组件(126)设置在头管(未示出)上方并且其包含刹车杆(未示出)。把手组件(126)通过一个或多个前悬架(130)连接至前轮(129)。前挡泥板(131)设置在前轮(129)上方,用于覆盖前轮(129)的至少一部分。燃料箱(103)安装至车架(未示出)的主管(未示出)并且其设置在车架(未示出)的空间的前部f中。车辆(100)具有照明装置,其包含头灯(127)、尾灯(未示出),转向指示灯分别包含前侧指示灯(未示出)和后侧指示灯(未示出)。后挡泥板(138)从车辆系统向外突出,并保护乘客免受泥浆飞溅,并保护后轮(133)免受外部部件的影响。动力单元(125)安装至车辆(100)的下部。在实施例中,动力单元(125)是ic发动机。燃料箱(103)功能性地连接至发动机(125)。座椅(132)位于燃料箱(103)的后部区域并且沿着座椅架在纵向方向上延伸。根据本发明的一个实施例,排气系统(126)连接至发动机(125)并向车辆(100)的后方延伸。
39.图2是根据本发明的一个实施例的用于盲点检测系统的框图。盲点检测系统(200)包括具有盲点传感器(201a,201b,201c,201d和201e)的传感器单元(201)、控制器(202)和警报指示单元(203)。警报指示单元(203)包括左碰撞警报单元(203a)和右碰撞警报单元(203b)。根据一个实施方案,左碰撞警报单元(203a)和右碰撞警报单元(203b)位于车辆的把手组件上。根据另一个实施方案,给骑乘者的指示器可以作为视觉警报指示器,也可以放置在仪表板上。此外,根据本发明的一个实施例,盲点传感器(201a,201b,201c,201d和201e)定位成覆盖车辆(如图2b中示出)的盲点区域(205,206和207),其中盲点区域在图2a中示出。此外,例如,至少一个盲点传感器(201a,201b)位于车辆的左侧,至少一个盲点传感器(201c,201d)位于车辆的右侧,并且单个传感器(201e)位于车辆的后侧(如在图2b中示出)。根据本发明的一个实施例,左盲点传感器1(201a)位于车辆(100)的燃料箱(103)的一侧,并且左盲点传感器2(201b)位于车辆的后摩托车座椅的大致下方的左侧。此外,左盲点传感器1(201a)和左盲点传感器2(201b)沿着相对于车辆的纵向中间平面轴(xx’)的一侧设置。此外,根据本发明的一个实施例,右盲点传感器1(201c)位于车辆(100)的燃料箱(103)的右侧,并且右盲点传感器2(201d)位于车辆的后摩托车座椅的大致下方的右侧。此外,右盲点传感器1(201c)和右盲点传感器2(201d)相对于车辆的中间平面(xx’)沿着另一侧设置。左盲点传感器1(201a)、左盲点传感器2(201b)、右盲点传感器1(201c)和右盲点传感器2(201d)也称为车辆的侧面传感器。后盲点传感器(201e)位于车辆中的后牌照安装支架的上方。根据另一个实施方案,在车辆中,至少后盲点传感器位于后牌照安装支架的上方。
40.此外,根据本发明的一个实施例,盲点传感器(201a,201b,201c,201d和201e)设置在车辆的两侧,感测接近车辆的障碍物,因此向控制器(202)发送信号,其中系统根据飞行时间原理工作。飞行时间原理被定义为一种用于测量传感器和物体之间距离的方法,该方法基于信号发射和信号被物体反射后返回传感器之间的时间差。因此,在此,控制器(202)在从盲点传感器接收输出信号之后,计算检测的车辆/障碍物的距离、速度和角度。如果车辆/障碍物落在车辆的盲点区域(205,206和207),则控制器(202)基于障碍物/车辆的存在向相应的警报指示单元,即左或右指示单元(203a,203b)发送警报信号。因此,警报指示单元向骑乘者指示接近障碍物/车辆以及特定方向信息。该配置协助保护骑乘者免受事故、碰撞等。上述配置还覆盖在车辆转弯或倾斜时的盲点检测,从而确保骑乘者的安全。
41.侧面盲点传感器的位置取决于各种因素,例如车辆的前向周边区域(208a,208b)、
车辆的长度。前向周边区域(208a,208b)与侧面盲点区域面积成反比,并且侧面盲点区域面积与传感器的数量成正比。例如,在鞍座式车辆中,由于骑乘者具有移动性约束,并且骑乘者的腿被约束在车辆的油箱附近,所以前向周边区域较小。由于前向周边区域较小,因此鞍座式车辆中的侧面盲点区域较多。此外,由于鞍座式车辆中的侧面盲点区域较多,所以车辆中所需的盲点传感器的数量较高(如在图2c中示出)。此外,由盲点传感器生成的视锥(a、b、c、d和e)消除了车辆的盲点区域(侧面盲点区域和后盲点区域)。以根据相同关系的鞍座式车辆的另一种情况为例,与鞍座式车辆相比,前向周边区域(208a,208b)更多,因为骑乘者的腿可以自由移动,从而提高了人体的移动性或自由度,以覆盖更宽的视锥。因为前向周边区域更多,因此鞍座式车辆中的侧面盲点区域较少。此外,由于鞍座式车辆中的侧面盲点区域较少,因此与鞍座式车辆(如在图2d中示出)相比,设置的盲点传感器的数量更少。同时,由盲点传感器生成的视锥(a,b和e)覆盖盲点区域(侧面盲点区域和后盲点区域),并且因此消除鞍座式车辆中的盲点区域。此外,根据本发明的一个实施例,直流电源单元(204)向设置在车辆中的盲点检测系统(200)提供电源。
42.图2e是根据本发明的一个实施例的至少一个传感器的预定视锥的预定范围。此外,根据本发明的一个实施例,侧面盲点传感器是超声波传感器,后盲点传感器是雷达传感器。侧面盲点传感器的检测范围的视锥在预定范围l1内。预定范围l1相对于传感器的位置在0-7m的范围内。此外,后盲点传感器的检测范围的视锥在预定l2内。预定范围l2相对于传感器的位置在0-70m的范围内。这确保了车辆中的盲点区域的覆盖范围,并且也确保了骑在车辆上的骑乘者的安全。根据本发明的另一个实施例,传感器可以是激光雷达传感器、相机等。
43.图3、图3a、图3c是根据本发明的一个实施例的在不同角度的车辆视图。此外,根据本发明的一个实施例,当车辆静止时(如在图3中示出),侧面盲点传感器覆盖车辆的侧面中的盲点区域。根据本发明的一个实施例,当车辆以预定角度倾斜/转弯时,车辆的盲点区域也会移动。因此,与传统方法不同,侧面盲点传感器覆盖车辆的移动盲点区域(如在图3b中示出),其中需要手动移动后视镜,以使骑乘者意识到盲点区域中的接近车辆。此外,根据本发明的一个实施例,在车辆的倾斜/转弯期间,后盲点传感器的视锥保持不变,并在车辆的倾斜/转弯期间覆盖车辆的后盲点区域。因此,这种配置确保保护车辆免受碰撞或事故。
44.图4是解释由盲点检测系统检测的方法的流程图。根据本发明的一个方面,当车辆启动时(s401),控制器接收位于车辆上的盲点传感器产生的关于接近或围绕车辆/障碍物的原始信号(s402)。随后,控制器分析从盲点传感器接收的原始信号(s403)。在相对于接近或围绕车辆/障碍物的速度、距离和角度分析接收到的原始信号之后,控制器决定接近车辆是否是障碍物(s404)。如果存在障碍物,控制器将进一步检查左、右和后盲点传感器的状态。如果通过至少一个左盲点传感器检测到障碍物(s405),则控制器通过适当的装置,例如,通过激活左警报指示器或碰撞单元,向骑乘者发出警报(s406)。如果由至少一个右盲点传感器检测到障碍物(s412),则控制器通过激活右警报指示器或碰撞单元向骑乘者发出警报(s413)。
45.如果障碍物被后盲点传感器检测到,则控制器分析障碍物是从车辆后侧朝向车辆左侧靠近(s408)还是从车辆后侧朝向车辆右侧靠近(s410)。如果它从左侧接近,则左侧指示器单元持续闪烁以指示其存在(s409)。如果它从右侧接近,则右侧指示器单元持续闪烁
以指示其存在(s411)。在一些情况下,障碍物由左右盲点传感器以及后盲点传感器中的至少一个检测到,然后警报指示器的发光强度增加,以指示更高的风险。类似地,如果障碍物位于目标车辆的左侧和右侧,则两个警报指示器都会发光,以指示在两侧上存在障碍物。在一个实现中,警报指示单元也可以是视觉或音频警报。视觉警报可以是放置在车辆上的位置的led指示灯,该指示灯在骑乘者骑两轮车时处于骑乘者的视野内。还可以利用音频指示器并将其放置在头盔内,以提供基于语音的帮助。根据替代的实施例,当前发明可以在三轮车或四轮车中实现,为车辆的使用者实现安全且稳健的盲点识别和警报机制。
46.此外,根据本发明的另一实施例,盲点检测系统包含传感器、控制器、警报指示单元和设置在骑乘者可接近区域中的开关。定位的开关提供了左右盲点传感器的易接近性,其中骑乘者可以取决于道路上的交通密度手动激活传感器。
47.本发明的图2中解释的实施例和图4中解释的方法有助于确保消除车辆中的盲点区域并克服本领域中已知的所有问题。
48.有利的是,本发明的实施例描述了盲点检测系统中的潜在修改,其覆盖并消除了车辆中的盲点区域,因此确保了骑乘者的安全。这有助于一种简单的系统,该系统确保了骑乘者的安全。
49.在不偏离本发明范围的情况下,可以将许多其他改进和修改并入本发明中。
50.附图标记列表:
51.图1:
52.100:鞍座式车辆
53.126:手柄组件
54.119:仪表盘
55.127:头灯
56.131:前挡泥板
57.129:前轮
58.130:前悬挂
59.125:发动机
60.103:燃料箱
61.134:座椅
62.138:后挡泥板
63.133:后轮
64.126:排气系统
65.图2
66.200:盲点检测系统
67.201(201a,201b,201c,201d,201e):传感器
68.202:控制器
69.203:警报指示单元
70.203a;左碰撞警报单元
71.203b:右碰撞警报单元
72.图2a
73.205:左盲点区域
74.206:后盲点区域
75.207:右盲点区域
76.208a,208b:前向外围区域
77.图2c
78.a:左盲点传感器1视锥
79.b:左盲点传感器2视锥
80.c:右盲点传感器1视锥
81.d;右盲点传感器2视锥
82.e:后盲点传感器视锥
83.图2e:
84.l1:侧面盲点传感器的预定范围
85.l2:后盲点传感器的预定范围
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1