一种少驱动多模式张拉移动机器人
1.本发明属于移动机器人领域,具体涉及一种具有少驱动多模式的张拉移动机器人。
背景技术:
2.移动机器人可应用于灾后救援、军事侦察、能源勘探等非结构化环境,协助或代替人类执行任务,受到国内外学者的普遍关注。非结构化环境对移动机器人的多地形适应能力及控制系统复杂程度提出了更高要求。相比于单一运动模式的机器人,多模式移动机器人具有更强的地形适应能力,因此研制具有多种运动模式且控制系统简单的移动机器人成为当前的研究热点。
3.在多运动模式机器人的研究方面,目前已取得一些成果。中国专利cn112277551a公开一种可变结构多模式移动机器人,该专利基于可变结构使机器人实现飞行模式、地面行走模式、地面滚动模式及飞爬结合等四种运动模式,适合在地形环境多变的条件下作业,多地形适应性优越,但该机器人具有14个自由度,需14个电机驱动,导致机器人的控制系统十分复杂。
4.中国专利cn103465988a公开了多运动模式移动机器,该专利结合十字杆和一系列连杆可使机器人实现缩放、折叠、滚动和步行等多种运动模式,可用于军事领域中勘探特殊地形,但机器人的驱动电机数目为12,机器人整体结构及控制系统非常复杂。
5.为解决上述多模式移动机器人的不足,亟需设计一种具有少驱动数目,控制简单的移动机器人。
技术实现要素:
6.本发明为解决现有技术存在的问题而提出,其目的是提供一种少驱动多模式张拉移动机器人。
7.本发明的技术方案是:一种少驱动多模式张拉移动机器人,包括机架,所述机架包括左右两侧对应布设且同步变形的左刚性杆系、右刚性杆系,所述左刚性杆系、右刚性杆系之间设置有沿接触面行走的棘轮附足,所述机架一侧设置有对左刚性杆系、右刚性杆系底部进行调节的前驱动装置,机架另一侧设置有对左刚性杆系、右刚性杆系顶部进行调节的后驱动装置。
8.更进一步的,所述左刚性杆系与右刚性杆系结构相对应,左刚性杆系、右刚性杆系之间的棘轮附足为多组。
9.更进一步的,所述左刚性杆系包括多根一号刚性杆,两根一号刚性杆为一组,每组中的一号刚性杆呈交叉状,所述一号刚性杆靠近端部侧壁处内置有轴承,所述轴承中设置有将相邻组一号刚性杆进行首尾相连的一号销轴。
10.更进一步的,所述左刚性杆系包括二号刚性杆,所述二号刚性杆竖向布设,所述二号刚性杆靠近端部侧壁处内置有轴承,两个一号销轴探出一号刚性杆的探出段插入到二号
刚性杆的轴承中。
11.更进一步的,所述一号销轴包括位于上方的上排销轴和位于下排的下排销轴,所述上排销轴中形成便于二号滑移索穿过的通孔,所述下排销轴中形成便于三号滑移索穿过的通孔。
12.更进一步的,所述前驱动装置、后驱动装置前后两侧对应布设,所述前驱动装置中设置有对下排滑移索进行伸缩调节发的调节结构,所述后驱动装置中设置有对上排滑移索进行伸缩调节发的调节结构。
13.更进一步的,所述前驱动装置包括与左刚性杆系、右刚性杆系相连的前装配板,所述前装配板一侧设置有端盖,端盖中嵌装轴承,所述轴承中设置有从动转动的中心轴,所述中心轴两端设置有对三号滑移索进行收放的一号绕线盘和对四号滑移索进行收放的二号绕线盘。
14.更进一步的,所述左刚性杆系、右刚性杆系中对应形成活动关节,对应的活动关节之间设置有棘轮附足。
15.更进一步的,所述棘轮附足包括内棘轮,所述内棘轮两端形成与活动关节装配的间隙安装沉孔,所述内棘轮上设置有进行单向移动的外棘轮。
16.更进一步的,所述内棘轮横向杆上设置有能够转动的支架,所述支架两侧设置有移动用的滚轮。
17.本发明公开了一种少驱动多模式张拉移动机器人,通过前驱动装置、后驱动装置实现对上下两排滑移索的索长调节控制,通过左刚性杆系、右刚性杆系提供了变形基础,通过二者结合实现机器人的丰富变形,形成蠕动、尺蠖运动及翻滚三种运动模式。
18.本发明在提高机器人环境适应性的同时可兼顾控制简单的优点,适用于非结构化野外环境的勘探。
附图说明
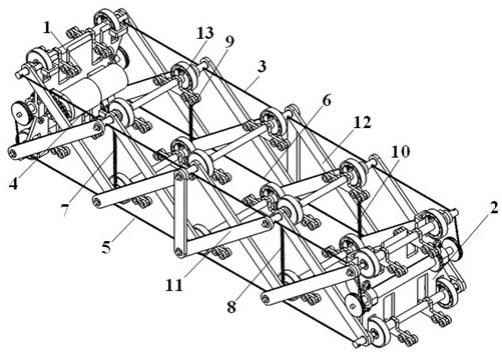
19.图1是本发明整机的结构示意图;图2是本发明中前驱动装置的结构示意图;图3是本发明中左刚性杆系的结构示意图;图4是本发明中棘轮附足的结构示意图;图5是本发明蠕动模式的示意图;图6是本发明尺蠖模式的示意图;图7是本发明翻滚模式的状态一示意图;图8是本发明翻滚模式的状态二示意图;图9是本发明翻滚模式的状态三示意图;图10是本发明翻滚模式的状态四示意图;其中:1
ꢀꢀ
前驱动装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2ꢀꢀ
后驱动装置3
ꢀꢀ
一号滑移索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ4ꢀꢀ
二号滑移索5
ꢀꢀ
三号滑移索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6ꢀꢀ
四号滑移索7
ꢀꢀ
一号弹性索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ8ꢀꢀ
二号弹性索9ꢀꢀ
三号弹性索
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10 四号弹性索11 左刚性杆系
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12 右刚性杆系13 棘轮附足
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14 机架15 步进电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16 一号直齿17 二号直齿
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18 中心轴19 轴承
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20 端盖21 一号绕线盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22 二号绕线盘23 一号刚性杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24 二号刚性杆25 一号销轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
26 二号销轴27 三号销轴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
28 内棘轮29 外棘轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30 棘爪31 橡胶圈
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32 滚轮33 小轴承
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34 内棘轮孔35 小轴。
具体实施方式
20.以下,参照附图和实施例对本发明进行详细说明:如图1~10所示,一种少驱动多模式张拉移动机器人,包括机架14,所述机架14包括左右两侧对应布设且同步变形的左刚性杆系11、右刚性杆系12,所述左刚性杆系11、右刚性杆系12之间设置有沿接触面行走的棘轮附足13,所述机架14一侧设置有对左刚性杆系11、右刚性杆系12底部进行调节的前驱动装置1,机架14另一侧设置有对左刚性杆系11、右刚性杆系12顶部进行调节的后驱动装置2。
21.所述左刚性杆系11与右刚性杆系12结构相对应,左刚性杆系11、右刚性杆系12之间的棘轮附足13为多组。
22.所述左刚性杆系11包括多根一号刚性杆23,两根一号刚性杆23为一组,每组中的一号刚性杆23呈交叉状,所述一号刚性杆23靠近端部侧壁处内置有轴承,所述轴承中设置有将相邻组一号刚性杆23进行首尾相连的一号销轴25。
23.所述左刚性杆系11包括二号刚性杆24,所述二号刚性杆24竖向布设,所述二号刚性杆24靠近端部侧壁处内置有轴承,两个一号销轴25探出一号刚性杆23的探出段插入到二号刚性杆24的轴承中。
24.所述一号销轴25包括位于上方的上排销轴和位于下排的下排销轴,所述上排销轴中形成便于二号滑移索4穿过的通孔,所述下排销轴中形成便于三号滑移索5穿过的通孔。
25.所述前驱动装置1、后驱动装置2前后两侧对应布设,所述前驱动装置1中设置有对下排滑移索进行伸缩调节发的调节结构,所述后驱动装置2中设置有对上排滑移索进行伸缩调节发的调节结构。
26.所述前驱动装置1包括与左刚性杆系11、右刚性杆系12相连的前装配板,所述前装配板一侧设置有端盖20,端盖20中嵌装轴承19,所述轴承19中设置有从动转动的中心轴18,所述中心轴18两端设置有对三号滑移索5进行收放的一号绕线盘21和对四号滑移索进行收放的二号绕线盘22。
27.所述左刚性杆系11、右刚性杆系12中对应形成活动关节,对应的活动关节之间设置有棘轮附足13。
28.所述棘轮附足13包括内棘轮28,所述内棘轮28两端形成与活动关节装配的间隙安装沉孔,所述内棘轮28上设置有进行单向移动的外棘轮29。
29.所述内棘轮28横向杆上设置有能够转动的支架,所述支架两侧设置有移动用的滚轮32。
30.相应的,所述右刚性杆系12与左刚性杆系11相对应,右刚性杆系12包括多根一号刚性杆23,两根一号刚性杆23为一组,每组中的一号刚性杆23呈交叉状,所述一号刚性杆23靠近端部侧壁处内置有轴承,所述轴承中设置有将相邻组一号刚性杆23进行首尾相连的一号销轴25。
31.两个一号刚性杆23通过一号销轴25相连,一号销轴25位置为活动关节。
32.所述左刚性杆系11、右刚性杆系12中滑动关节处的一号销轴25插入到内棘轮28的间隙安装沉孔中,且二者为间隙配合。
33.优选的,两个竖向的一号销轴25之间设置有弹性索。
34.优选的,所述前驱动装置1中前装配板背部设置有步进电机15,所述步进电机15的主轴上设置有一号直齿16,所述中心轴18上设置有二号直齿17,所述一号直齿16、二号直齿17相啮合,所述步进电机15实现对中心轴18的启停正反转驱动。
35.相应的,所述前装配板中形成便于一号直齿16、二号直齿17啮合的矩形孔。
36.相应的,所述后驱动装置2与前驱动装置1结构相同,所述后驱动装置2中的两个绕线盘对位于上排的三号弹性索3、四号弹性索4进行同步收放。
37.所述前装配板侧壁处形成带孔安装立板,所述带孔安装立板与一号刚性杆通过二号销轴26相连,横向两个二号销轴26之间设置有棘轮附足34。
38.相应的,后驱动装置2中包括后装配板,所述后装配板侧壁处形成带孔安装立板,所述带孔安装立板与一号刚性杆通过三号销轴27相连,横向两个三号销轴27之间设置有棘轮附足34。
39.所述前装配板中形成凹槽,所述凹槽对棘轮附足34中的外棘轮29进行容纳,且外棘轮29与凹槽之间为间隙配合。
40.所述前装配板中形成卡槽,所述棘轮附足34中能够转动的支架能够从卡槽中通过,所述卡槽与支架之间为间隙配合。
41.又一实施例本实施例中结合附图进行详细说明。
42.如图1所示,一种少驱动多模式张拉移动机器人包括前驱动装置1、后驱动装置2、一号滑移索3、二号滑移索4、三号滑移索5、四号滑移索6、一号弹性索7、二号弹性索8、三号弹性索9、四号弹性索10、左刚性杆系11、右刚性杆系12、棘轮附足13。
43.所述前驱动装置1与所述后驱动装置2完全相同,分别驱动三号滑移索5、四号滑移索6和一号滑移索3、二号滑移索4。
44.如图2所示,所述前驱动装置1包括机架14、步进电机15、第一直齿16、第二直齿17、中心轴18、轴承19、端盖20、一号绕线盘21、二号绕线盘22。所述步进电机15通过螺钉与机架14固定连接。所述端盖20通过法兰台进行固定。
45.所述一号直齿16与步进电机轴15主轴连接,并与二号直齿17啮合传动。二号直齿17通过键和键槽与中心轴18固定连接。所述中心轴18与轴承19内圈固定连接,同时轴承19外圈与机架14及端盖20固定连接,所述端盖20与所述机架14通过螺栓连接。一号绕线盘21与二号绕线盘22与中心轴18固定连接,一号绕线盘21与二号绕线盘22位于中心轴18两端。
46.所述一号绕线盘21、二号绕线盘22上分别缠有三号滑移索5及四号滑移索6。通过步进电机15的驱动,一号绕线盘21与二号绕线盘22可同时顺时针或逆时针旋转,进而使得三号滑移索5、四号滑移索6同时伸长或缩短。
47.如图3所示,左刚性杆系11与右刚性杆系12结构完全相同。以左刚性杆系11进行说明,左刚性杆系11包括八个一号刚性杆23、一个二号刚性杆24、六个一号销轴25、两个二号销轴26、两个三号销轴27。
48.一号刚性杆23与一号销轴25通过轴承连接,且一号刚性杆23呈十字交叉方式,可绕一号销轴25相对转动。所述二号刚性杆24与所述一号销轴25通过轴承连接,且二号刚性杆24呈竖直放置。
49.所述二号销轴26、三号销轴27用于连接前驱动装置1、后驱动装置2。
50.所述一号销轴25、二号销轴26、三号销轴27中留有径向通孔,二号滑移索4、三号滑移索5穿过通孔,使得一号销轴25、二号销轴26、三号销轴27可沿二号滑移索4、三号滑移索5滑动。
51.所述一号销轴25通过轴承与所述一号弹性索7和二号弹性索8连接。
52.如图4所示,棘轮附足13包括内棘轮28、外棘轮29、棘爪30、橡胶圈31、滚珠32、小轴承33、小轴35。
53.所述橡胶圈31固定连接于外棘轮29外侧。所述内棘轮28通过小轴承33与外棘轮29连接。所述棘爪30通过小轴35与内棘轮28固定连接,保证所述棘轮附足13中的外棘轮29可顺时针单向旋转。
54.所述滚轮32内圈与支架相连,支架与内棘轮28固定连接,支架可绕内棘轮28的横轴光滑转动。
55.所述内棘轮28中横轴端部的内棘轮孔34与一号销轴25、二号销轴26、三号销轴27形成间隙配合,使得一号销轴25、二号销轴26、三号销轴27可在内棘轮孔34中光滑转动。
56.本发明的一种使用方式蠕动模式如图5所示,本方式中前驱动装置1、后驱动装置2同步进行驱动,前驱动装置1、后驱动装置2分别驱动三号滑移索5、四号滑移索6以及一号滑移索3、二号滑移索4,使得三号滑移索5、四号滑移索6以及一号滑移索3、二号滑移索4同时伸长或同时缩短,机器人产生蠕动变形,并在所述棘轮附足13的作用下向前移动。
57.本发明的又一种使用方式尺蠖运动模式如图6所示,本方式中后驱动装置2驱动一号滑移索3、二号滑移索4伸长,同时,前驱动装置1驱动三号滑移索5、四号滑移索6缩短,机器人产生尺蠖变形,并在所述棘轮附足13的作用下向前移动。
58.本发明的再一种使用方式
如图7~10所示,在尺蠖运动模式的基础上,所述一号滑移索3、二号滑移索4继续伸长,所述三号滑移索5、四号滑移索6继续缩短,直到前驱动装置1与所述后驱动装置2重合,机器人向前倾倒。
59.之后,所述一号滑移索3、二号滑移索4在后驱动装置2的作用下缩短,所述三号滑移索5、四号滑移索6在前驱动装置1的作用下伸长,直到机器人向前倾倒并恢复至初始位型,机器人完成一个翻滚周期。
60.本发明公开了一种少驱动多模式张拉移动机器人,通过前驱动装置、后驱动装置实现对上下两排滑移索的索长调节控制,通过左刚性杆系、右刚性杆系提供了变形基础,通过二者结合实现机器人的丰富变形,形成蠕动、尺蠖运动及翻滚三种运动模式。
61.本发明在提高机器人环境适应性的同时可兼顾控制简单的优点,适用于非结构化野外环境的勘探。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1