助力车扭矩补偿方法、装置、助力车和存储介质与流程
本申请涉及助力车,特别是涉及一种助力车扭矩补偿方法、装置、助力车、存储介质和计算机程序产品。
背景技术:
1、由于使用的便捷,助力自行车等助力车开始使用在人们的生活中。助力自行车包括与电动马达集成的常规自行车部件,该电动马达可用于推进,包括辅助或补充由骑手供应的踏板动力。
2、助力车的踩踏的曲柄属于一种绕支点可活动的杠杆模型,在助力车骑行过程中,助力车的电机的输出动力不平稳。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够解决助力车的电机输出动力不平稳的助力车扭矩补偿装置、方法、助力车、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供了一种助力车扭矩补偿方法,所述方法包括:
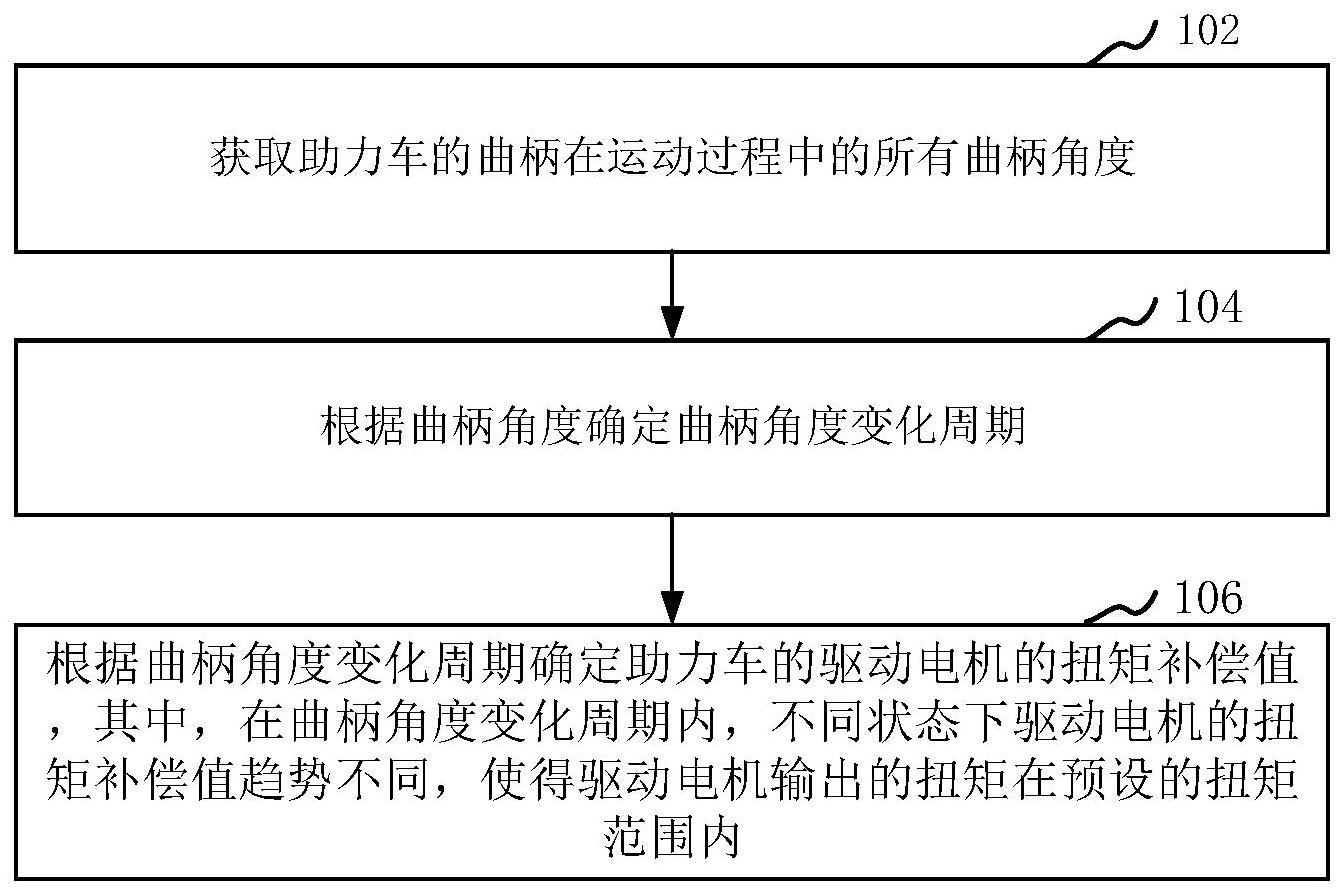
3、获取助力车的曲柄在运动过程中的所有曲柄角度;
4、根据所述曲柄角度确定曲柄角度变化周期;
5、根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,其中,在所述曲柄角度变化周期内,不同状态下所述驱动电机的扭矩补偿值趋势不同,使得所述驱动电机输出的扭矩在预设的扭矩范围内。
6、在其中一个实施例中,所述曲柄角度变化周期包括曲柄第一状态和曲柄第二状态;所述曲柄的力矩在所述曲柄第一状态增大,对应的所述助力车的驱动电机的扭矩补偿值减小;
7、所述曲柄的力矩在所述曲柄第二状态减小,对应的所述助力车的驱动电机的扭矩补偿值增大。
8、在其中一个实施例中,所述获取助力车的曲柄在运动过程中的所有曲柄角度,包括:
9、获取所述曲柄两次经过设定起始位置之间产生的脉冲信号数;
10、根据所述脉冲信号数确定每个脉冲信号对应的曲柄角度。
11、在其中一个实施例中,所述根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,包括:
12、根据所述曲柄角度确定曲柄角度变化周期,在所述曲柄角度变化周期,根据所述曲柄角度的正弦关系确定所述助力车的驱动电机的扭矩补偿值。
13、在其中一个实施例中,其特征在于,所述根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,包括:
14、根据所述曲柄角度确定曲柄角度变化周期,在所述曲柄角度变化周期,根据所述曲柄角度的余弦关系确定所述助力车的驱动电机的扭矩补偿值。
15、第二方面,本申请还提供了一种助力车扭矩补偿装置,
16、所述装置包括设置在助力车上的扭矩传感器和与所述扭矩传感器连接的控制器,其中,所述扭矩传感器内集成有霍尔型传感器和磁环,所述霍尔传感器不随所述助力车的曲柄旋转同步旋转,所述磁环随着所述助力车的曲柄旋转同步旋转,所述霍尔传感器和所述磁环,用于确定所述助力车的曲柄运动过程中的所有曲柄角度;
17、所述控制器,用于根据所述曲柄角度确定曲柄角度变化周期,根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,其中,在所述曲柄角度变化周期内,不同状态下所述驱动电机的扭矩补偿值趋势不同,使得所述驱动电机输出的扭矩在预设的扭矩范围内。
18、第三方面,本申请还提供了一种助力车。所述助力车包括助力车本体和助力车扭矩补偿装置,
19、所述装置包括设置在助力车上的扭矩传感器和与所述扭矩传感器连接的控制器,其中,所述扭矩传感器内集成有霍尔型传感器和磁环,所述霍尔传感器不随所述助力车的曲柄旋转同步旋转,所述磁环随着所述助力车的曲柄旋转同步旋转,所述霍尔传感器和所述磁环,用于确定所述助力车的曲柄运动过程中的所有曲柄角度;
20、所述控制器,用于根据所述曲柄角度确定曲柄角度变化周期,根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,其中,在所述曲柄
21、角度变化周期内,不同状态下所述驱动电机的扭矩补偿值趋势不同,使得所述5驱动电机输出的扭矩在预设的扭矩范围内。
22、第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
23、0获取助力车的曲柄在运动过程中的所有曲柄角度;
24、根据所述曲柄角度确定曲柄角度变化周期;
25、根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,其中,在所述曲柄角度变化周期内,不同状态下所述驱动电机的扭矩补偿值趋势不同,使得所述驱动电机输出的扭矩在预设的扭矩范围内。
26、5第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,
27、包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
28、获取助力车的曲柄在运动过程中的所有曲柄角度;
29、根据所述曲柄角度确定曲柄角度变化周期;
30、根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,其0中,在所述曲柄角度变化周期内,不同状态下所述驱动电机的扭矩补偿值趋势不同,使得所述驱动电机输出的扭矩在预设的扭矩范围内。
31、上述助力车扭矩补偿方法、装置、助力车、存储介质和计算机程序产品,通过获取助力车的曲柄在运动过程中的所有曲柄角度;根据曲柄角度变化周期
32、确定曲柄的力矩变化,基于曲柄的力矩变化,根据曲柄角度确定助力车的驱动5电机的扭矩补偿值。根据扭矩补偿值对曲柄力矩进行补偿,以使输入的力矩平稳,进而确保助力车的电力输出动力平稳。
技术特征:
1.一种助力车扭矩补偿方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述曲柄角度变化周期包括曲柄第一状态和曲柄第二状态;所述曲柄的力矩在所述曲柄第一状态增大,对应的所述助力车的驱动电机的扭矩补偿值减小;
3.根据权利要求1所述的方法,其特征在于,所述获取助力车的曲柄在运动过程中的所有曲柄角度,包括:
4.根据权利要求1至3任意一项所述的方法,其特征在于,所述根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,包括:
5.根据权利要求1至3任意一项所述的方法,其特征在于,所述根据所述曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值,包括:
6.一种助力车扭矩补偿装置,其特征在于,所述装置包括设置在助力车上的扭矩传感器和与所述扭矩传感器连接的控制器,其中,所述扭矩传感器内集成有霍尔型传感器和磁环,所述霍尔传感器不随所述助力车的曲柄旋转同步旋转,所述磁环随着所述助力车的曲柄旋转同步旋转,所述霍尔传感器和所述磁环,用于确定所述助力车的曲柄运动过程中的所有曲柄角度;
7.根据权利要求6所述的装置,其特征在于,所述曲柄角度变化周期包括曲柄第一状态和曲柄第二状态;所述曲柄的力矩在所述曲柄第一状态增大,对应的所述助力车的驱动电机的扭矩补偿值减小;
8.根据权利要求6所述的装置,其特征在于,所述扭矩传感器内集成有两个霍尔型传感器和两个磁环,其中,一个霍尔型传感器为零点霍尔型传感器,另一霍尔型传感器为脉冲霍尔型传感器,一个磁环为单极对磁环,另一磁环为多对极磁环;所述零点霍尔型传感器,用于根据所述单极对磁环,输出零点信号以及确定设定起始位置,并将所述零点信号发送至所述控制器,以使所述控制器响应所述零点信号,确定所述曲柄两次经过所述设定起始位置之间的所有曲柄角度,根据所述所有曲柄角度的曲柄角度变化周期确定所述助力车的驱动电机的扭矩补偿值;所述所有曲柄角度所述脉冲霍尔型传感器基于所述多对极磁环确定的。
9.一种助力车,其特征在于,所述助力车包括助力车本体和如权利要求6至8中任一项所述的助力车扭矩补偿装置。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至5中任一项所述的方法的步骤。
技术总结
本申请涉及一种助力车扭矩补偿方法、装置、助力车和存储介质。所述方法包括:获取助力车的曲柄在运动过程中的所有曲柄角度;根据曲柄角度确定曲柄角度变化周期;根据曲柄角度变化周期确定助力车的驱动电机的扭矩补偿值,其中,在曲柄角度变化周期,曲柄的力矩先增大后减小,扭矩补偿值先减小后增大。采用本方法能够根据扭矩补偿值对曲柄力矩进行补偿,以使输入的力矩平稳,确保助力车的电力输出动力平稳。
技术研发人员:陈显仲
受保护的技术使用者:深圳拓邦股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!