一种越障机器人的制作方法
本技术涉及仿生机器人,尤其涉及一种越障机器人。
背景技术:
1、随着科技的发展,机器人技术越来越成熟,机器人已经不仅仅被用于工业生产中进行周期性机械化生产,而且被用于军事、水下探测、空间探测、抢险救灾、核工业等领域。因此,对能够在特殊环境下积极适应并灵活移动的“特种机器人”的研究越来越受到各个国家的一致重视。现有的机器人主要分为四类:轮式、腿式、履带式、复合式(如轮腿式、轮履式等),其中轮式和履带式使用最为广泛,轮式机器人移动速度快、控制灵活,尤其转向比较容易实现,但是应对复杂、恶劣路况适应性较差。履带式机器人,适应性强,履带与地面接触面积大,但运动速度较慢,不够灵活,机动性较差,且往往能量消耗较大,为此,提出一种越障机器人。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种越障机器人。
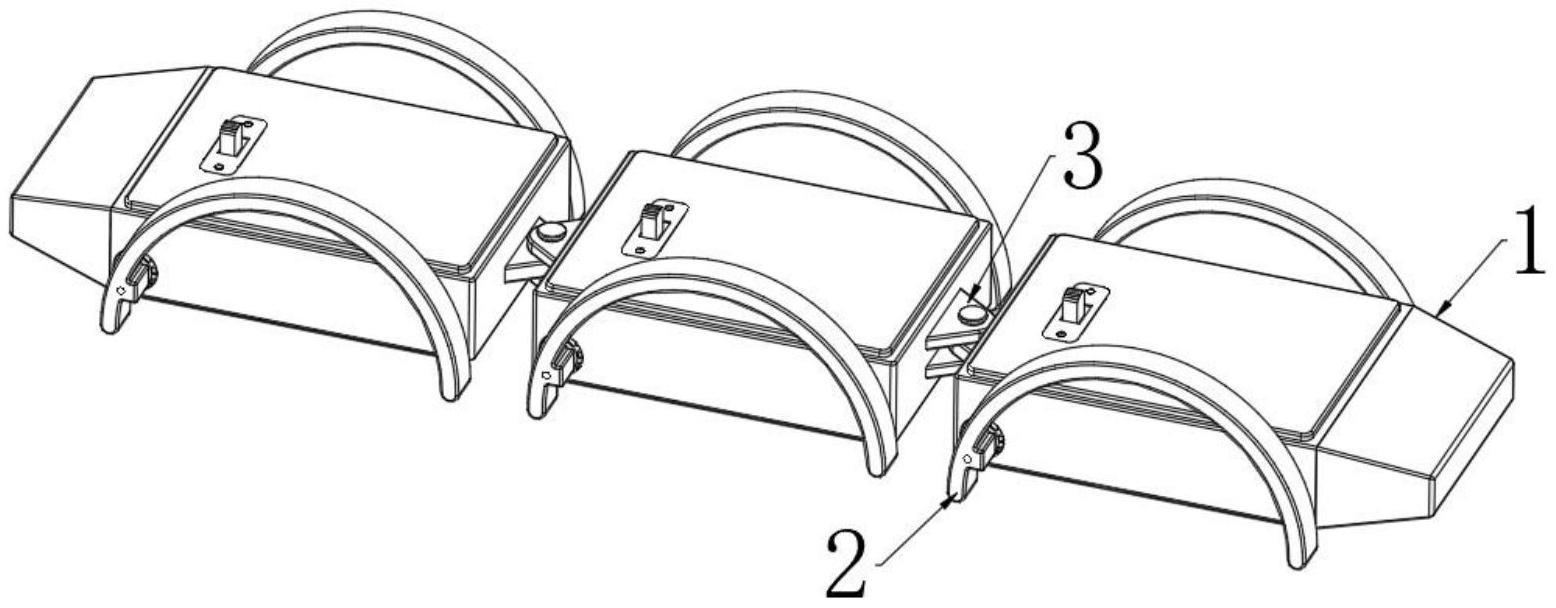
2、为了实现上述目的,本实用新型采用了如下技术方案:一种越障机器人,包括机器人主体,所述机器人主体的数量至少为两个,所述机器人主体包括机身,相邻两个机身之间设有活动连接组件,相邻两个机身通过活动连接组件活动连接在一起,所述机身的两侧均设有行驶组件,所述行驶组件包括与机身固定连接在一起的电机,所述电机的输出轴上固定安装有爬爪,所述爬爪呈弧形。
3、优选的,所述爬爪包括与电机输出轴固定连接的自转端以及公转端。
4、优选的,所述机身上开设有电池仓,所述电池仓内设有蓄电池,所述蓄电池的上方设有盖板,所述盖板与机身可拆卸式的连接在一起。
5、优选的,所述机身的两侧均开设有安装槽,位于机身两侧的电机均固定安装下相应的安装槽内。
6、优选的,所述盖板上固定安装有开关以及充电端口,且盖板的底部固定安装有控制主板,所述电机、蓄电池、开关充电端口以及控制主板之间通过导线连接在一起并构成回路。
7、优选的,所述活动连接组件包括固定在同一个机身上的两个耳板二以及固定在相邻机身上的耳板一,所述耳板一转动安装在两个耳板二之间,两个耳板二以及耳板一之间设有同一个销杆,所述销杆贯穿两个耳板二以及耳板一并与两个耳板二以及耳板一转动连接在一起。
8、与现有技术相比,本实用新型的有益效果是
9、本实用新型过增加爬爪的长度和相邻机器人主体之间的距离,使得爬爪在转动过程当中能够提高机器人主体的离地间隙,使机器人主体能够较为轻松的越过障碍物,大大提高越障的能力;多个机器人主体通过活动连接组件活动连接在能够爬上较高障碍的同时,保证了一定的灵活性,
技术特征:
1.一种越障机器人,包括机器人主体(1),其特征在于:所述机器人主体(1)的数量至少为两个,所述机器人主体(1)包括机身(11),相邻两个机身(11)之间设有活动连接组件(3),相邻两个机身(11)通过活动连接组件(3)活动连接在一起,所述机身(11)的两侧均设有行驶组件(2),所述行驶组件(2)包括与机身(11)固定连接在一起的电机(21),所述电机(21)的输出轴上固定安装有爬爪(22),所述爬爪(22)呈弧形。
2.根据权利要求1所述的一种越障机器人,其特征在于:所述爬爪(22)包括与电机(21)输出轴固定连接的自转端(221)以及公转端(222)。
3.根据权利要求1所述的一种越障机器人,其特征在于:所述机身(11)上开设有电池仓(12),所述电池仓(12)内设有蓄电池(13),所述蓄电池(13)的上方设有盖板(14),所述盖板(14)与机身(11)可拆卸式的连接在一起。
4.根据权利要求1所述的一种越障机器人,其特征在于:所述机身(11)的两侧均开设有安装槽(16),位于机身(11)两侧的电机(21)均固定安装下相应的安装槽(16)内。
5.根据权利要求3所述的一种越障机器人,其特征在于:所述盖板(14)上固定安装有开关(15)以及充电端口,且盖板(14)的底部固定安装有控制主板,所述电机(21)、蓄电池(13)、开关(15)充电端口以及控制主板之间通过导线连接在一起并构成回路。
6.根据权利要求1所述的一种越障机器人,其特征在于:所述活动连接组件(3)包括固定在同一个机身(11)上的两个耳板二(32)以及固定在相邻机身(11)上的耳板一(31),所述耳板一(31)转动安装在两个耳板二(32)之间,两个耳板二(32)以及耳板一(31)之间设有同一个销杆(33),所述销杆(33)贯穿两个耳板二(32)以及耳板一(31)并与两个耳板二(32)以及耳板一(31)转动连接在一起。
7.根据权利要求1所述的一种越障机器人,其特征在于:所述机身(11)以及爬爪(22)均为挠性材质制成。
技术总结
本技术属于仿生机器人技术领域,尤其为一种越障机器人,包括机器人主体,所述机器人主体的数量至少为两个,所述机器人主体包括机身,相邻两个机身之间设有活动连接组件,相邻两个机身通过活动连接组件活动连接在一起,所述机身的两侧均设有行驶组件,所述行驶组件包括与机身固定连接在一起的电机,所述电机的输出轴上固定安装有爬爪,所述爬爪呈弧形。本技术通过模拟爬行类动物的四肢,行驶灵活多变,能够有助于更轻松的越过障碍物,具有较高机动性和地形适应性。
技术研发人员:杨帆,任强,潘娇
受保护的技术使用者:杨帆
技术研发日:20220607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!