自移动设备及刹车卡死机构的制作方法
本申请涉及机器人领域,特别涉及一种自移动设备及刹车卡死机构。
背景技术:
1、近年来,随着技术水平的不断提高,涌现出各种功能的机器人,比如:送餐机器人、消杀机器人、扫地机器人、家政服务机器人和导购机器人等等。
2、机器人的驱动轮通常通过弹性悬架结构安装在机体上,这样,在机器人越障的过程中,驱动轮在弹性悬架的驱动下,可以始终与地面接触,从而提升整机的越障性能。
3、但是,当机器人刹车时,驱动轮受到水平向后的作用力,该作用力突破弹性悬架结构向驱动轮施加的压力,使得驱动轮与地面脱离,从而导致机器人与地面的摩擦力减少,增大机器人的刹车距离。
技术实现思路
1、本申请的目的在于提供一种自移动设备及刹车卡死机构,减少自移动设备的刹车距离。
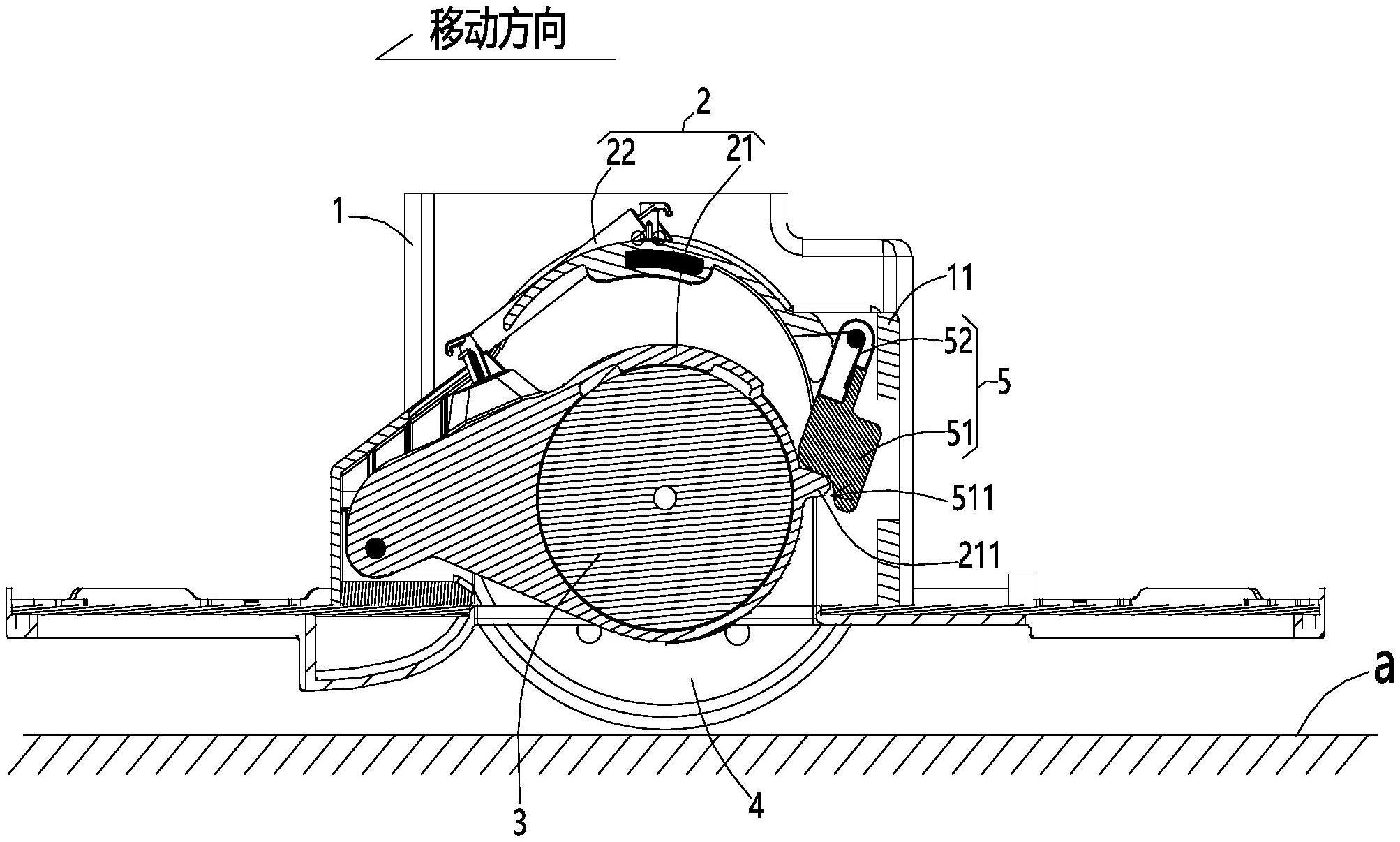
2、为实现上述目的,本申请一方面提供一种自移动设备,所述自移动设备至少包括机体、弹性悬架结构和阻挡结构;所述弹性悬架结构至少包括摆臂,所述摆臂的一端与所述机体铰接,所述摆臂的另一端安装有驱动结构,所述驱动结构连接有驱动轮;所述阻挡结构与所述机体连接,当所述自移动设备刹车时,所述阻挡结构由第一工作状态切换为第二工作状态,以阻挡所述摆臂的另一端围绕所述摆臂的一端旋转。
3、为实现上述目的,本申请另一方面还提供一种刹车卡死机构,安装在自移动设备的机体上,所述机体具有移动方向;所述机体铰接有摆臂的一端,所述摆臂的另一端用于连接有驱动轮,所述摆臂具有旋转区域;所述刹车卡死机构至少包括阻挡件;所述阻挡件的一端与所述机体铰接,在所述移动方向上,所述阻挡件位于所述摆臂的后方;当所述自移动设备刹车时,所述阻挡件的另一端在惯性作用下,移动至所述旋转区域内,以阻挡所述摆臂的另一端围绕所述摆臂的一端旋转。
4、由此可见,本申请提供的技术方案,自移动设备的机体可以通过摆臂与驱动轮连接,并且机体上还安装有阻挡结构。阻挡结构具有第一工作状态和第二工作状态,当自移动设备刹车时,阻挡结构处于第二工作状态,此时,阻挡结构可以阻挡摆臂旋转。也就是说,阻挡结构可以阻挡驱动轮上升,从而使得驱动轮始终与地面接触,保证自移动设备与地面的摩擦力,进而减少自移动设备的刹车距离。同时,由于在自移动设备刹车的过程中,阻挡结构使得驱动轮与地面始终接触,这也避免了驱动轮与地面之间多次碰撞,产生咯噔噔异响,提高用户的使用体验。
技术特征:
1.一种自移动设备,其特征在于,所述自移动设备至少包括机体、弹性悬架结构和阻挡结构;
2.根据权利要求1所述的自移动设备,其特征在于,所述阻挡结构还包括阻挡件;
3.根据权利要求2所述的自移动设备,其特征在于,所述阻挡件的一端与所述机体铰接;
4.根据权利要求3所述的自移动设备,其特征在于,所述摆臂的另一端形成有凸起部;
5.根据权利要求3所述的自移动设备,其特征在于,所述阻挡结构还包括第一弹性件;
6.根据权利要求5所述的自移动设备,其特征在于,所述第一弹性件为第一扭簧;
7.根据权利要求5所述的自移动设备,其特征在于,所述第一弹性件为第一拉簧;
8.根据权利要求2所述的自移动设备,其特征在于,所述阻挡结构还包括第一伸缩部件;
9.根据权利要求1所述的自移动设备,其特征在于,所述阻挡结构还包括第二伸缩部件和接触件;
10.根据权利要求1所述的自移动设备,其特征在于,所述弹性悬架结构还包括第二弹性件;
11.根据权利要求10所述的自移动设备,其特征在于,所述第二弹性件为第二拉簧;
12.根据权利要求1所述的自移动设备,其特征在于,所述驱动结构包括驱动部件和刹车部件;
13.一种刹车卡死机构,安装在自移动设备的机体上,所述机体具有移动方向;所述机体铰接有摆臂的一端,所述摆臂的另一端用于连接有驱动轮,所述摆臂具有旋转区域;其特征在于,所述刹车卡死机构至少包括阻挡件;
14.根据权利要求13所述的刹车卡死机构,其特征在于,所述刹车卡死机构还包括第一弹性件;
15.根据权利要求14所述的刹车卡死机构,其特征在于,所述第一弹性件为第一扭簧;
技术总结
本申请公开了一种自移动设备及刹车卡死机构,所述自移动设备至少包括机体、弹性悬架结构和阻挡结构;所述弹性悬架结构至少包括摆臂,所述摆臂的一端与所述机体铰接,所述摆臂的另一端安装有驱动结构,所述驱动结构连接有驱动轮;所述阻挡结构与所述机体连接,当所述自移动设备刹车时,所述阻挡结构由第一工作状态切换为第二工作状态,以阻挡所述摆臂的另一端围绕所述摆臂的一端旋转。本申请可以在自移动设备刹车时,阻挡驱动轮上移,减少自移动设备的刹车距离。
技术研发人员:付兴光
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:20221201
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!