一种电力检测机器人转运装置的制作方法
本发明涉及电力设备,尤其涉及一种电力检测机器人转运装置。
背景技术:
1、输电线路常架设在跨越高山、江河等地区,并且经常受台风,覆冰等自然灾害的影响,因此输电线路的巡检成为了一个十分重要的问题。电力设备长时间使用会出现线路老化、内部元件过载损坏等等问题,为防患于未然,需要定期对设备进行检测,若设备出现损坏,也需要专业的检测设备进行检修,检测设备精度较高,运输及使用时,需要避免摔落及较大震动。
2、有资料显示,现有技术中为了避免人力浪费,均采用一些比较先进的巡检方法进行检查,如挂线机器人巡检,但需要将挂线机器人转运至检修点,但有些检修区域位于山区,山路在陡峭,其挂线机器人较重不利于人工携带运送至检修地点。
3、中国专利文献cn107671414a公开了一种“电力设备在线检测用终端生产用转运装置”。采用了包括底板及转运箱,所述底板底部两侧焊接有连接板,所述连接板内侧轴承连接有连接轴,所述连接轴表面套设有支撑脚,所述支撑脚一端顶部安装有空气弹簧,其底部安装有滚轮,底板上表面两端焊接有支撑座,所述支撑座上表面焊接有套管,所述转运箱两侧焊接有撑板,所述撑板底部焊接有伸缩杆,所述伸缩杆表面套设有弹簧,转运箱两侧焊接有导向块。上述技术方案运输效率较低且减震效果有限。
技术实现思路
1、本发明主要解决原有的技术方案运输效率较低且减震效果有限的技术问题,提供一种电力检测机器人转运装置,通过升降支撑机构和固定机构的配合,使检测机器人能够快速固定在车厢内部,避免车辆在行驶的过程中导致检测机器人晃动,同时缓冲行程过程中因抖动带来的震动冲击力。
2、本发明的上述技术问题主要是通过下述技术方案得以解决的:本发明包括车厢和设置在车厢底部的驱动组件,其特征在于,所述车厢内部设有用于辅助放置的升降支撑机构以及用于配合升降支撑机构进行固定的固定机构。通过升降支撑机构和固定机构的配合,使检测机器人能够快速固定在车厢内部,避免车辆在行驶的过程中导致检测机器人晃动,同时缓冲行程过程中因抖动带来的震动冲击力。
3、作为优选,所述的升降支撑机构包括支撑台和转动杆,所述转动杆水平设置在车厢的底部,转动杆的一端与动力件传动连接,转动杆两端分别设有相反螺纹,转动杆具有相反螺纹的端部上均旋设有不可转动的传动块,所述传动块经过交叉杆与支撑台下表面相连。升降支撑机构升出车厢,然后将检测机器人放置在升降支撑机构上,并使升降支撑机构带着检测机器人移动至车厢内部,便于将检测机器人放置于车厢内部。
4、作为优选,所述的交叉杆包括两个中部铰接的杆体,所述两个杆体的一端分别与两个传动块铰接,交叉杆两个杆体的另一端与支撑台的两端铰接。通过转动杆转动,使两个传动块向两侧滑动运动,从而使交叉杆下方的交叉角度变大,交叉杆下方的交叉角度越大,杆体的倾斜角度就越大,交叉杆的高度就越低,从而控制支撑台下降,两个传动块向相对的方向滑动,从而使交叉杆下方的交叉角度变小,杆体的倾斜角度就绝越小,交叉杆的高度就越高,从而控制支撑台上升。通过控制支撑台的上升便于检测机器人的安放,使检测机器人的放置更为简单。
5、作为优选,所述的固定机构包括夹持板、涡轮和蜗杆套筒,夹持板的两侧设有传动杆,传动杆的下端均通过转杆与车厢内壁转动连接,涡轮固定套设在靠近转动杆的转杆上,蜗杆套筒套设在转动杆上,涡轮与蜗杆套筒啮合传动。在升降支撑机构下降的时候,会带动固定机构运动,配合升降支撑机构对检测机器人进行夹持固定。
6、作为优选,所述的支撑台下移到最低面时,夹持板与支撑台的中轴线保持一致。当转动杆转动带着支撑台下降时,蜗杆套筒反转,蜗杆套筒与涡轮啮合传动,涡轮转动并通过传动杆控制夹持板转动,使夹持板重新移动到支撑台的上方,并对支撑台上的检测机器人进行夹持,使检测机器人固定在夹持板与支撑台之间。
7、作为优选,所述的动力件包括设置在车厢外的手柄,转杆的一端延伸至车厢外与手柄连接。一种手动传动控制转动杆转动,一种电动控制转动杆转动。
8、作为优选,所述的转杆上套设有限位块,限位块位于转杆的相反螺纹交界处。防止传动块相向移动破坏螺纹。
9、作为优选,所述的动力件还包括电机,所述电机固定在车厢内,转杆的一端与电机的输出轴传动连接。一种手动传动控制转动杆转动,一种电动控制转动杆转动。
10、作为优选,所述的车厢靠近传动杆的一侧端壁开设有两个避让孔,两个避让孔分别位于对应传动杆的转动路径上。避让孔能让传动杆移出车厢外部,避免传动杆运行占用车厢大量的内部空间。
11、作为优选,所述的支撑台的上沿四角均设有限位角,所述支撑台的对角线小于夹持板的对角线。通过限位角对检测机器人的主体进行限制,同时为了防止车辆移动中震动冲击,将限位角的材质设为硅胶材质,通过硅胶材质的材质对震动冲击进行减缓。
12、本发明的有益效果是:通过升降支撑机构和固定机构的配合,使检测机器人能够快速固定在车厢内部,避免车辆在行驶的过程中导致检测机器人晃动,同时缓冲行程过程中因抖动带来的震动冲击力。
技术特征:
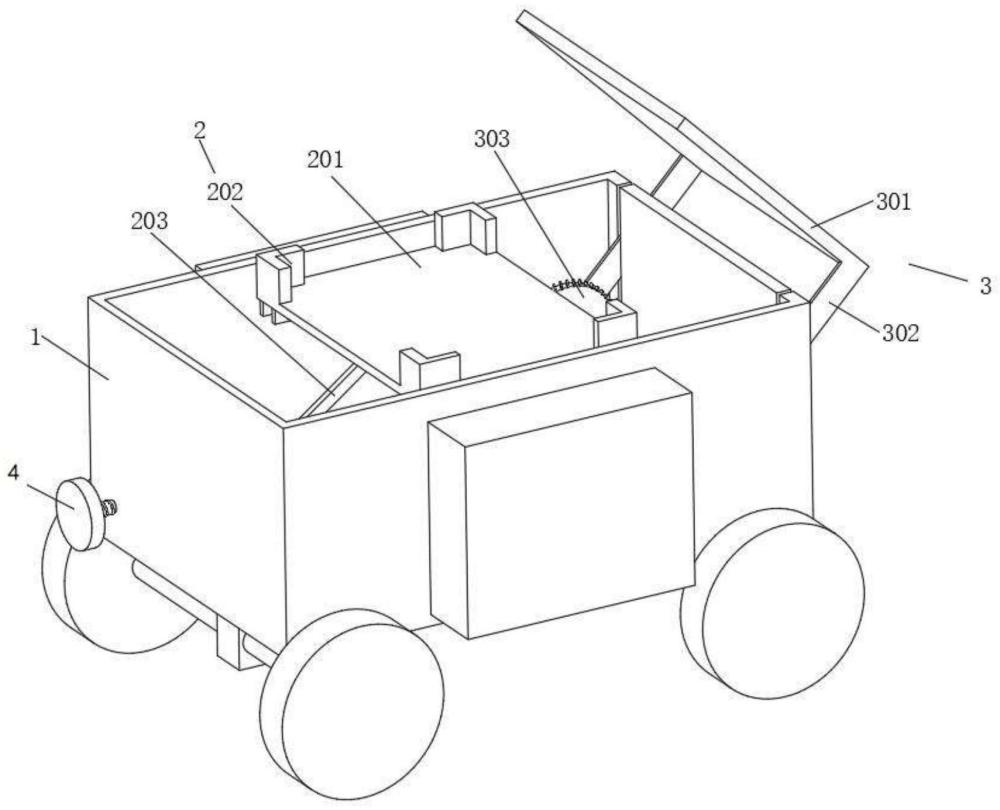
1.一种电力检测机器人转运装置,包括车厢(1)和设置在车厢(1)底部的驱动组件,其特征在于,所述车厢(1)内部设有用于辅助放置的升降支撑机构(2)以及用于配合升降支撑机构(2)进行固定的固定机构(3)。
2.根据权利要求1所述的一种电力检测机器人转运装置,其特征在于,所述升降支撑机构(2)包括支撑台(201)和转动杆(205),所述转动杆(205)水平设置在车厢(1)的底部,转动杆(205)的一端与动力件传动连接,转动杆(205)两端分别设有相反螺纹,转动杆(205)具有相反螺纹的端部上均旋设有不可转动的传动块(204),所述传动块(204)经过交叉杆与支撑台(201)下表面相连。
3.根据权利要求2所述的一种电力检测机器人转运装置,其特征在于,所述交叉杆包括两个中部铰接的杆体(203),所述两个杆体(203)的一端分别与两个传动块(204)铰接,交叉杆两个杆体(203)的另一端与支撑台(201)的两端铰接。
4.根据权利要求1所述的一种电力检测机器人转运装置,其特征在于,所述固定机构(3)包括夹持板(301)、涡轮(303)和蜗杆套筒(304),夹持板(301)的两侧设有传动杆(302),传动杆(302)的下端均通过转杆(305)与车厢(1)内壁转动连接,涡轮(303)固定套设在靠近转动杆(205)的转杆(305)上,蜗杆套筒(304)套设在转动杆(205)上,涡轮(303)与蜗杆套筒(304)啮合传动。
5.根据权利要求4所述的一种电力检测机器人转运装置,其特征在于,所述支撑台(201)下移到最低面时,夹持板(301)与支撑台(201)的中轴线保持一致。
6.根据权利要求2所述的一种电力检测机器人转运装置,其特征在于,所述动力件包括设置在车厢(1)外的手柄(4),转杆(305)的一端延伸至车厢(1)外与手柄(4)连接。
7.根据权利要求2所述的一种电力检测机器人转运装置,其特征在于,所述转杆(305)上套设有限位块(5),限位块(5)位于转杆(305)的相反螺纹交界处。
8.根据权利要求2或6所述的一种电力检测机器人转运装置,其特征在于,所述动力件还包括电机,所述电机固定在车厢(1)内,转杆(305)的一端与电机的输出轴传动连接。
9.根据权利要求2所述的一种电力检测机器人转运装置,其特征在于,所述车厢(1)靠近传动杆(302)的一侧端壁开设有两个避让孔(6),两个避让孔(6)分别位于对应传动杆(302)的转动路径上。
10.根据权利要求2所述的一种电力检测机器人转运装置,其特征在于,所述支撑台(201)的上沿四角均设有限位角(202),所述支撑台(201)的对角线小于夹持板(301)的对角线。
技术总结
本发明公开了一种电力检测机器人转运装置,包括车厢和设置在车厢底部的驱动组件,其特征在于,所述车厢内部设有用于辅助放置的升降支撑机构以及用于配合升降支撑机构进行固定的固定机构。上述技术方案通过升降支撑机构和固定机构的配合,使检测机器人能够快速固定在车厢内部,避免车辆在行驶的过程中导致检测机器人晃动,同时缓冲行程过程中因抖动带来的震动冲击力。
技术研发人员:刘平平,来骏,岳灵平,戴建华,方杰,李龙,于姜赟,程亮亮,张鹏,李响,季世超
受保护的技术使用者:国网浙江省电力有限公司湖州供电公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!