一种用于机器人行走的履带装置
本技术涉及机器人行走,尤其涉及一种用于机器人行走的履带装置。
背景技术:
1、履带行走的机器人相比其他行走方式具有多个优势:稳定性、载重能力强、越障能力优秀、在特殊地形具备更好的摩擦力和压力分散,同时提供精确控制。此外,履带结构更耐用,适用于恶劣环境。
2、机器人履带可能在高负荷运行、不当使用、设计或制造缺陷、不合理的维护以及长期使用磨损等情况下脱落,然而现有技术中履带复位时需要工人抬起整个履带结构并维持在一定高度,当履带结构重量较大时,工人抬起整个履带结构并维持在一定高度的劳动强度较大。
技术实现思路
1、本实用新型的目的是为了解决现有技术中履带复位时需要工人抬起整个履带结构并维持在一定高度,当履带结构重量较大时,工人抬起整个履带结构并维持在一定高度的劳动强度较大的问题,而提出的一种用于机器人行走的履带装置。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种用于机器人行走的履带装置,包括桁架,所述桁架顶部左右侧面固定设置有支撑块,所述支撑块顶部固定设置有安装座,所述桁架一端对称固定设置有左延板,所述桁架另一端对称固定设置有右延板,所述右延板外壁转动连接有第二链轮,所述桁架底部设置有便于履带装置更换履带的辅助组件。
4、可选地,所述左延板侧面转动连接有第一链轮,所述第一链轮、第二链轮外壁公共套设有同一根运动履带。
5、可选地,所述桁架底部对称转动连接有v型架,所述v型架底部对称转动连接有导向辊,所述导向辊侧面边缘位置对称固定设置有挡边。
6、可选地,所述辅助组件包括移位螺杆、驱动筒、驱动杆、支撑块,所述移位螺杆头部转动连接在竖直块底部,所述竖直块固定连接在桁架底部。
7、可选地,所述移位螺杆尾部螺纹旋入有驱动筒,所述驱动筒侧面与驱动杆一端转动连接,所述驱动杆另一端转动连接在支撑块侧面。
8、可选地,所述支撑块顶部对称滑动设置有辅助柱,所述辅助柱固定连接在桁架底部。
9、与现有技术相比,本实用新型具备以下优点:
10、1、本实用新型在桁架底部设置有辅助组件,当桁架两侧的履带脱落时,辅助组件可临时将整个桁架抬离底面并维持一定时间,便于将桁架两侧面的履带复位,且大大降低了工人的劳动强度。
技术特征:
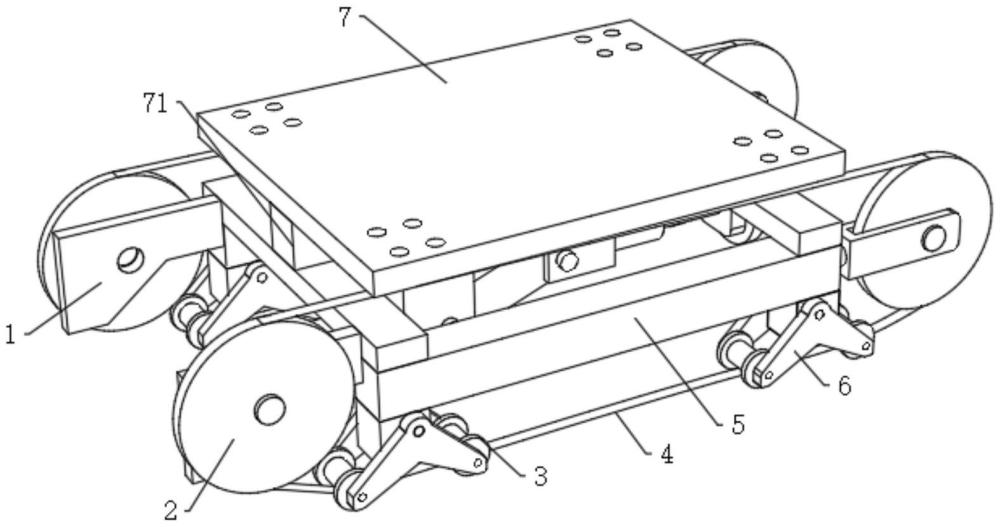
1.一种用于机器人行走的履带装置,包括桁架(5),其特征在于,所述桁架(5)顶部左右侧面固定设置有悬撑块(71),所述悬撑块(71)顶部固定设置有安装座(7),所述桁架(5)一端对称固定设置有左延板(1),所述桁架(5)另一端对称固定设置有右延板(8),所述右延板(8)外壁转动连接有第二链轮(9),所述桁架(5)底部设置有便于履带装置更换履带的辅助组件。
2.根据权利要求1所述的一种用于机器人行走的履带装置,其特征在于,所述左延板(1)侧面转动连接有第一链轮(2),所述第一链轮(2)、第二链轮(9)外壁公共套设有同一根运动履带(4)。
3.根据权利要求1所述的一种用于机器人行走的履带装置,其特征在于,所述桁架(5)底部对称转动连接有v型架(6),所述v型架(6)底部对称转动连接有导向辊(3),所述导向辊(3)侧面边缘位置对称固定设置有挡边。
4.根据权利要求1所述的一种用于机器人行走的履带装置,其特征在于,所述辅助组件包括移位螺杆(10)、驱动筒(11)、驱动杆(12)、支撑块(13),所述移位螺杆(10)头部转动连接在竖直块(51)底部,所述竖直块(51)固定连接在桁架(5)底部。
5.根据权利要求4所述的一种用于机器人行走的履带装置,其特征在于,所述移位螺杆(10)尾部螺纹旋入有驱动筒(11),所述驱动筒(11)侧面与驱动杆(12)一端转动连接,所述驱动杆(12)另一端转动连接在支撑块(13)侧面。
6.根据权利要求5所述的一种用于机器人行走的履带装置,其特征在于,所述支撑块(13)顶部对称滑动设置有辅助柱(14),所述辅助柱(14)固定连接在桁架(5)底部。
技术总结
本技术公开了一种用于机器人行走的履带装置,涉及机器人行走技术领域,包括桁架,所述桁架顶部左右侧面固定设置有支撑块,所述支撑块顶部固定设置有安装座,所述桁架一端对称固定设置有左延板,所述桁架另一端对称固定设置有右延板,所述右延板外壁转动连接有第二链轮,所述桁架底部设置有便于履带装置更换履带的辅助组件,所述左延板侧面转动连接有第一链轮,所述第一链轮、第二链轮外壁公共套设有同一根运动履带,所述桁架底部对称转动连接有V型架。本技术在桁架底部设置有辅助组件,当桁架两侧的履带脱落时,辅助组件可临时将整个桁架抬离底面并维持一定时间,便于将桁架两侧面的履带复位,且大大降低了工人的劳动强度。
技术研发人员:钱小川
受保护的技术使用者:西安外事学院
技术研发日:20230808
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!