一种水下机器人用运动姿态调节装置
1.本实用新型涉及一种机械工程和水下航行器领域,具体涉及一种水下机器人用运动姿态调节装置。
背景技术:
2.水下滑翔机是为了满足当前海洋环境监测和测量的需要,将浮标技术与水下机器人技术相结合研制的一种新型水下航行器,它不仅可以沿垂直剖面进行监测作业,还可以在水平面进行大范围的海洋环境测量和监测。
3.运动姿态调节装置是这种水下机器人的关键部件之一,小体积、低能耗、高可靠性是保证垂直剖面以及水平剖面大范围滑翔运动的关键,其性能好坏直接影响水下机器人的性能与可靠性。
4.然而,现有的运动姿态调节装置结构复杂,所占空间较大,而且只能轴向或者周向调节,功能单一,轴向调节用负载和周向横滚调节用载荷都是同一个,实现各自运动时存在多余能耗,不能满足小型化、轻量化和低能耗的要求。
技术实现要素:
5.有鉴于此,本实用新型提供了一种水下机器人用运动姿态调节装置,该运动姿态调节装置采用精密滚珠丝杠滚珠花键,配合球轴承,以及偏置齿轮组、轴向运动齿轮组进行传动,利用一根轴即可实现装置轴向运动、周向运动并承受载荷,具有体积小、重量轻、传动效率高的优点,能很好地满足水下机器人的轴向姿态调节和偏航姿态调节各项要求。
6.本实用新型采用以下具体技术方案:
7.一种水下机器人用运动姿态调节装置,包括:偏转大齿轮、偏转小齿轮、前部连接板、轴向大齿轮、轴向小齿轮、偏转驱动系统、螺母、螺母轴承座、球轴承、轴向驱动系统、后花键母、后安装板、丝杠花键主轴、运动连接板、前花键母、前安装板、电池组、后部连接板;
8.沿着所述丝杠花键主轴的轴线方向,所述前部连接板与所述后部连接板相对设置;
9.所述丝杠花键主轴的一端与所述前部连接板转动连接,另一端与所述后部连接板转动连接;
10.沿着从所述前部连接板至所述后部连接板的方向,所述螺母、所述前花键母和所述后花键母依次与所述丝杠花键主轴螺旋配合;
11.所述螺母轴承座通过所述球轴承安装于所述螺母的外周侧,并通过所述运动连接板与所述前花键母固定连接;
12.所述轴向驱动系统固定安装于所述螺母轴承座,所述轴向驱动系统的输出轴与所述轴向小齿轮固定连接;
13.所述轴向大齿轮与所述螺母固定连接,并与所述轴向小齿轮啮合;
14.所述前安装板固定安装于所述前花键母;
15.所述后安装板与所述前安装板相对设置,并固定安装于所述后花键母;
16.所述电池组固定安装于所述前安装板与所述后安装板之间;
17.所述偏转驱动系统固定连接于所述前部连接板,所述偏转驱动系统的输出轴与所述偏转小齿轮固定连接;
18.所述偏转大齿轮固定安装于所述丝杠花键主轴,并与所述偏转小齿轮啮合。
19.进一步地,所述偏转驱动系统与所述轴向驱动系统均偏置于所述丝杠花键主轴的一侧;所述电池组偏置于所述丝杠花键主轴的另一侧。
20.进一步地,所述偏转驱动系统的输出轴的旋转轴线与所述丝杠花键主轴的轴线平行。
21.进一步地,所述轴向驱动系统的输出轴的旋转轴线与所述丝杠花键主轴的轴线平行。
22.进一步地,还包括轴向驱动系统连接件;所述轴向驱动系统通过所述轴向驱动系统连接件固定安装于所述螺母轴承座。
23.进一步地,还包括与所述丝杠花键主轴平行设置的拉紧杆;所述拉紧杆的一端通过锁紧螺母与所述前安装板固定连接,另一端通过锁紧螺母与所述后安装板固定连接,用于将所述电池组夹紧。
24.进一步地,在所述丝杠花键主轴与所述前部连接板之间、以及所述丝杠花键主轴与所述后部连接板之间均安装有圆锥滚子轴承。
25.进一步地,所述丝杠花键主轴与所述前部连接板之间的圆锥滚子轴承通过前部轴承顶盖进行端部固定;所述丝杠花键主轴与所述后部连接板之间的圆锥滚子轴承通过后部轴承顶盖进行端部固定;两个所述圆锥滚子轴承为面对面安装。
26.进一步地,所述偏转大齿轮通过螺钉和压紧片i安装于所述丝杠花键主轴;
27.所述偏转小齿轮通过螺钉和压紧片ii安装于所述偏转驱动系统的输出轴;
28.所述轴向小齿轮通过螺钉和压紧片iii安装于所述轴向驱动系统的输出轴。
29.有益效果:
30.一方面,本实用新型的运动姿态调节装置采用集成化设计,采用精密丝杠花键主轴,配合球轴承,以及偏置齿轮组、轴向运动齿轮组进行传动,利用一根轴即可实现机构轴向运动、周向运动,机构体积小,重量轻,可实现高回转精度、高传动效率,装置可以实现
±
70
°
周向运动、
±
60毫米轴向往复运动,实现水下滑翔机器人的轴向姿态调节和偏航姿态调节,可满足多种任务需求;
31.另一方面,本实用新型的运动姿态调节装置在有限空间内,电池组可以进行
±
70
°
周向运动,提高了装置姿态横滚调节范围,进而提高了水下机器人的偏航姿态调节范围;同时,本实用新型采用周向偏转驱动系统固定+轴向驱动传动系统带动电池组负载前后轴向移动,两者呈现空间上下布置且不干涉,整个装置轴向尺寸大大减少,能够满足多样化需求;
32.另外,本实用新型的运动姿态调节装置采用滚珠花键实现轴向运动支撑,并在花键轴端部设计了一对高精度、大载荷的圆锥滚子轴承,采用面对面方式安装,方便安装与拆卸,能够承受作用在装置上的力和力矩。
附图说明
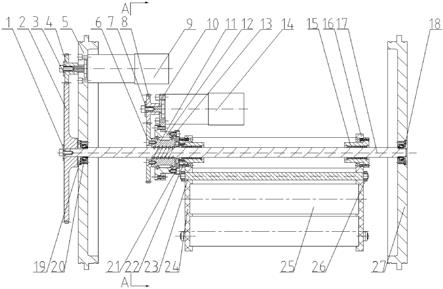
33.图1为本实用新型提供的一种水下机器人用运动姿态调节装置的结构示意图;
34.图2为本实用新型提供的一种水下机器人用运动姿态调节装置的前视图;
35.图3为图1中水下机器人用运动姿态调节装置的a-a截面剖视图。
36.其中,1-压紧片i,2-偏转大齿轮,3-压紧片ii,4-偏转小齿轮,5-前部连接板,6-轴向大齿轮,7-压紧片iii,8-轴向小齿轮,9-偏转驱动系统,10-轴向驱动系统连接件,11-螺母,12-螺母轴承座,13-球轴承,14-轴向驱动系统,15-后花键母,16-后安装板,17-丝杠花键主轴,18-后部轴承顶盖,19-前部轴承顶盖,20-圆锥滚子轴承,21-运动连接板,22-前花键母,23-拉紧杆,24-前安装板,25-电池组,26-锁紧螺母,27-后部连接板。
具体实施方式
37.下面结合附图并举实施例,对本实用新型进行详细描述:
38.如图1所示,本实施例提供了一种水下机器人用运动姿态调节装置,该运动姿态调节装置包括:压紧片i1、偏转大齿轮2、压紧片ii 3、偏转小齿轮4、前部连接板5、轴向大齿轮6、压紧片iii 7、轴向小齿轮8、偏转驱动系统9、轴向驱动系统连接件10、螺母11、螺母轴承座12、球轴承13、轴向驱动系统14、后花键母15、后安装板16、丝杠花键主轴17、后部轴承顶盖18、前部轴承顶盖19、圆锥滚子轴承20、运动连接板21、前花键母22、拉紧杆23、前安装板24、电池组25、锁紧螺母26以及后部连接板27。
39.其中,前部连接板5通过圆锥滚子轴承20与丝杠花键主轴17的一端光轴转动连接,该圆锥滚子轴承20靠近前部连接板5一侧的端部通过前部轴承顶盖19与螺钉进行端部固定,后部连接板27通过另一个圆锥滚子轴承20与丝杠花键主轴17的另一端光轴转动连接,该圆锥滚子轴承20靠近后部连接板一侧的端部通过后部轴承顶盖18与螺钉进行端部固定。前部轴承顶盖19和后部轴承顶盖18都能将圆锥滚子轴承20轴向压紧。另外,上述两个圆锥滚子轴承20具有高精度、大载荷的优点,且采用面对面安装方式,方便安装与拆卸,也能够承受作用在装置上的力和力矩。
40.沿着前部连接板5至后部连接板27的方向,螺母11、前花键母22和后花键母15依次与丝杠花键主轴17螺旋配合。其中螺母11的外周侧装有球轴承13,球轴承13的外周侧装有螺母轴承座12,螺母轴承座12靠近前花键母22的端部通过运动连接板21、螺钉与前花键母22固定连接。上述连接,使得丝杠花键主轴17、螺母11、前花键母22和后花键母15构成精密滚珠丝杠滚珠花键。
41.电池组25位于丝杠花键主轴17的一侧,电池组25靠近前部连接板5的一端设置有前安装板24,另一端设置有后安装板16,利用平行于丝杠花键主轴17的拉紧杆23配合锁紧螺母26将前安装板24、电池组25、后安装板16紧密连接。
42.轴向驱动系统14位于丝杠花键主轴17的另一侧,它与螺母轴承座12之间的连接通过轴向驱动系统连接件10完成,具体地,轴向驱动系统连接件10与螺母轴承座12采用螺钉连接,还与轴向驱动系统14采用螺钉连接。轴向驱动系统14的输出轴与丝杠花键主轴17平行,使用螺钉与压紧片iii 7将轴向小齿轮8与轴向驱动系统14的输出轴固定连接,安装在丝杠花键主轴17上并与螺母11固定连接的轴向大齿轮6与轴向小齿轮8啮合。由此,轴向小齿轮8与轴向大齿轮6啮合形成轴向运动齿轮组,配合丝杠花键主轴17、螺母11,使得轴向驱
动系统14可以实现沿着丝杠花键主轴17的轴线方向作往复直线运动。
43.将上述前安装板24与上述前花键母22固定连接,上述后安装板16与上述后花键母15固定连接后,使得丝杠花键主轴17、螺母11、前花键母22和后花键母15构成精密滚珠丝杠滚珠花键,电池组25可随轴向驱动系统14一起沿着丝杠花键主轴17轴线方向作往复直线运动。
44.偏转驱动系统9与轴向驱动系统14处于丝杠花键主轴17的同一侧,偏转驱动系统9与上述前部连接板5通过螺钉连接,另外,偏转驱动系统9的输出轴与丝杠花键主轴17平行,使用螺钉与压紧片ii 3将偏转小齿轮4固定在偏转驱动系统9的输出轴上,并与偏转大齿轮2啮合。其中,偏转大齿轮2装在紧邻前部轴承顶盖19一侧的丝杠花键主轴17的端部,并使用螺钉、压紧片i1将其与丝杠花键主轴17紧密相连。由此,在偏转驱动系统9的驱动下,水下机器人可以实现
±
70
°
旋转运动。
45.经过项目试验测试,该实用新型实施例能够满足水下滑翔机器人姿态调节需要,实现所需的俯仰调节、偏航调节;装置体积小、重量轻,相同条件下可以装载更多的有用载荷或者电池,同时每次姿态调节所需能耗减少,在相同容量的电池组供电情况下,有效延长了水下滑翔机运行时间,能够提高了试验效率。
46.综上所述,以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1