利用波浪供能的水母机器人
1.本发明涉及水母机器人领域,具体地,涉及利用波浪供能的水母机器人。
背景技术:
2.目前的各种仿水母机器人均没有实现自供能,需要频繁回收布放。且现有水下机器人在海洋科考中易惊扰海洋生物和续航性不足。
3.专利cn113665769a公布了一种仿生水母机器人及其海洋探索应用方法,该机器人由摆臂、连杆、电子舱等原件组成,该机器人主要是通过电子舱内的电机来驱动同样位于电子舱内的吸水囊,使得柔性骨架的形变带动吸水囊的收缩与舒张,从而模拟水母的吸水与排水过程产生推进力,但该机器人无法实现能量自给,且驱动方式所需的驱动力较大。
4.专利cn108608408a公布了另一种多自由度仿生水母机器人,该机器人采用多个舵机驱动多条机械臂,同时在机械臂外部附着的生物膜内充有空气。该机器人通过机械臂的快速摆动产生的对水的反作用力实现推进,同时利用生物膜内充有的空气调节浮力。但这种机器人采用的调节浮力的方式受到的限制较多,在水下调节浮力较为困难,且同样无法能源自给。
5.专利cn113306684a公布的一种仿水母机器人采用了一种推拉机构,由推杆电机驱动摆臂往复收展以利用排水的反作用力推进,但该机器人所采用的整体机械结构较为复杂,且推拉机构中所使用的零件较多,因此不利于减轻机器人重量以及装配工作量。
技术实现要素:
6.针对现有技术中的缺陷,本发明的目的是提供一种利用波浪供能的水母机器人。
7.根据本发明提供的一种利用波浪供能的水母机器人,包括基体外壳、仿钟状体机构、控制模块、发电装置、浮力调节模块以及可折叠下浮体机构,控制模块、仿钟状体机构、发电装置和浮力调节模块均位于基体外壳内;仿钟状体机构经由其中的隔板通过螺栓与基体外壳中外壳内壁的突起部分相连接;控制模块经由托板通过螺钉与仿钟状体机构中的固定铜柱相连接;发电装置经由其内部的发电机底座、发条盒通过螺栓固定在基体外壳的储水舱顶部上;浮力调节模块经由其内部的双向水泵通过螺栓连接在储水舱顶部上,折叠下浮体机构的导轨通过螺栓连接在基体外壳的储水舱底板下方;
8.可折叠下浮体机构在运动模式和发电模式之间进行切换,可折叠下浮体机构和基体外壳实现相对运动产生电能。
9.一些实施例中,仿钟状体机构包括上防水塑料膜、主舵机、隔板、摆臂、固定铜柱、舵机支座以及销,主舵机分别通过舵机支座连接于隔板上,摆臂和销固定在主舵机的舵盘上,且摆臂延伸出外壳侧面的开口;
10.上防水塑料膜连接于摆臂和外壳上,上防水塑料膜粘结于摆臂上形成类似于水母钟状体的形状,且上防水塑料膜粘结于外壳侧面的开口。
11.一些实施例中,浮力调节模块包括外联通导管、双向水泵以及内联通导管,双向水
泵通过外联通导管与外界相连,双向水泵通过内联通导管与储水舱相连。
12.一些实施例中,发电装置包括后转轴、前转轴、联轴器、单向轴承、发电机、发电机底座、柔索以及发条盒,发电机通过发电机底座夹持并固定,发电机通过联轴器连接后转轴,后转轴内嵌有单向轴承、并与单向轴承的外圈配合并通过键连接,前转轴一端与单向轴承的内圈配合通过键连接,前转轴另一端与发条盒固连,柔索缠绕在前转轴上,柔索一端穿过储水舱的中心中空部分与下浮体中的上滑块相连。
13.一些实施例中,可折叠下浮体机构包括下浮体和导轨,下浮体滑动连接于导轨上;
14.下浮体包括下防水塑料膜、上滑块、上连杆、转轴、下连杆以及下滑块,下防水塑料膜分别粘接于上滑块和下滑块上,上滑块与上连杆相连,下连杆与下滑块相连,上连杆通过转轴与下连杆相连,上滑块和下滑块滑动连接于导轨上,导轨顶端连接于基体外壳的储水舱底板下方。
15.一些实施例中,上滑块包括上滑块外壳、折叠电机、联轴器、蜗杆、蜗轮、微型电磁铁以及上滑块底座,折叠电机连接于上滑块外壳,蜗杆通过联轴器连接于折叠电机上,蜗杆与蜗轮啮合,蜗轮绕着上滑块外壳与上连杆相连,微型电磁铁连接于上滑块底座上。
16.一些实施例中,下滑块包括下滑块外壳和下滑块底座,下滑块外壳连接于下滑块底座上,转轴连接于下滑块外壳上。
17.一些实施例中,基体外壳包括头盖、上防水垫片、储水舱、下防水垫片、储水舱底板以及外壳,头盖和外壳之间设有上防水垫片,储水舱连接于外壳内部,且储水舱顶部与头盖相连,储水舱底部通过下防水垫片连接于储水舱底板上。
18.一些实施例中,控制模块包括电池、stm控制板以及托板,电池位于stm控制板上方,且电池固定在托板上,托板位于仿钟状体机构上方。
19.一些实施例中,在从运动模式转换为发电模式时,浮力调节模块工作将基体外壳内部储水舱的水抽出,降低机器人重力,使得机器人上浮;同时折叠下浮体机构中的下浮体通过折叠电机-的运动发生变形,横向面积增大,下浮体可沿导轨运动,作为一部分;而基体外壳及其内部的仿钟状体机构、控制模块、发电装置、浮力调节模块以及导轨则可看作另一部分并整体作为上浮体,上下浮体之间只通过柔索相连,在波浪的作用下,由于上下浮体受力不相同且存在刚度与阻尼,因此将会沿着导轨产生相对运动,带动柔索运动引发发电装置发电;
20.在从发电模式转换回运动模式时,浮力调节模块工作将环境中的水抽入基体外壳内部储水舱中,增加机器人重力,使得机器人下潜;同时折叠下浮体机构中的下浮体通过折叠电机-反向运动变形,横向面积减小,下浮体锁死,仿钟状体机构模拟水母游动。
21.与现有技术相比,本发明具有如下的有益效果:
22.(1)本发明将波浪能发电装置的原理与水下机器人相结合,使得机器人可以通过自身的结构利用波浪能进行自供电,解决了水下机器人难以长时间续航的问题。
23.(2)本发明通过设计折叠式的下浮体结构,使得下浮体能够根据机器人的需要展开或折叠,以便于在机器人的发电状态下增大波浪对于下浮体的阻尼力,在运动状态下降低游动阻力;发电机构中的单向轴承保证了上下浮体相对运动的可靠性和单向电流。
附图说明
24.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
25.图1利用波浪供能的水母机器人在游动状态下的示意图
26.图2利用波浪供能的水母机器人在发电状态下的示意图
27.图3利用波浪供能的水母机器人控制舱段结构示意图
28.图4利用波浪供能的水母机器人驱动舱段结构示意图仿钟状体机构示意图(上防水塑料膜已隐藏)
29.图5利用波浪供能的水母机器人发电装置及浮力调节模块示意图
30.图6利用波浪供能的水母机器人发电装置结构示意图
31.图7利用波浪供能的水母机器人下浮体结构剖视图(收起状态)
32.图8利用波浪供能的水母机器人下浮体结构剖视图(展开状态)
33.图9利用波浪供能的水母机器人储水舱剖视图
34.图10利用波浪供能的水母机器人整体剖视图
35.图11利用波浪供能的水母机器人发电原理示意图
36.图12利用波浪供能的水母机器人运动模式下上防水塑料膜收缩示意图
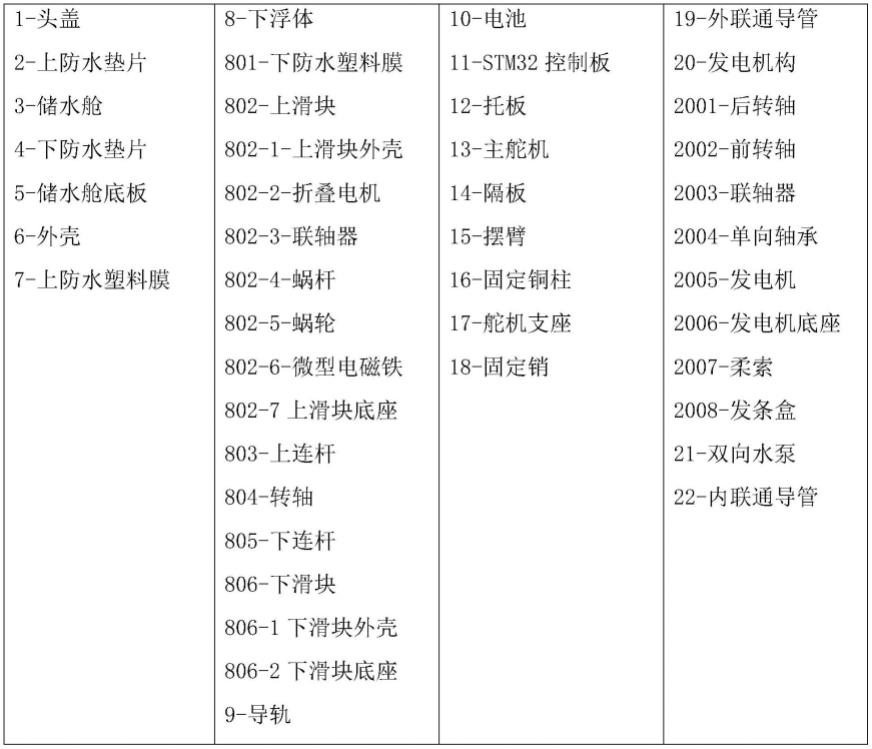
37.图中标号:
38.具体实施方式
39.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
40.实施例1
41.本发明提供的一种利用波浪供能的水母机器人,如图1-12所示,包括基体外壳、仿钟状体机构、控制模块、发电装置20、浮力调节模块以及可折叠下浮体机构,控制模块、仿钟状体机构、发电装置20和浮力调节模块均位于基体外壳内;仿钟状体机构经由其中的隔板14通过螺栓与基体外壳中外壳6内壁的突起部分相连接;控制模块经由托板12通过螺钉与仿钟状体机构中的固定铜柱16相连接;发电装置20经由其内部的发电机底座2006、发条盒2008通过螺栓固定在基体外壳的储水舱3顶部上;浮力调节模块经由其内部的双向水泵21通过螺栓连接在储水舱3顶部上,折叠下浮体机构的导轨9通过螺栓连接在基体外壳的储水舱底板5下方。可折叠下浮体机构在运动模式和发电模式之间进行切换,可折叠下浮体机构和基体外壳实现相对运动产生电能。
42.工作原理:在从运动模式转换为发电模式时,浮力调节模块工作将基体外壳内部储水舱3的水抽出,降低机器人重力,使得机器人上浮;同时折叠下浮体机构中的下浮体8通过折叠电机802-2的运动发生变形,横向面积增大,下浮体8可沿导轨9运动,作为一部分;而基体外壳及其内部的仿钟状体机构、控制模块、发电装置、浮力调节模块以及导轨9则可看作另一部分并整体作为上浮体,上下浮体之间只通过柔索2007相连,在波浪的作用下,由于上下浮体受力不相同且存在刚度与阻尼,因此将会沿着导轨9产生相对运动,带动柔索2007运动引发发电装置发电;
43.在从发电模式转换回运动模式时,浮力调节模块工作将环境中的水抽入基体外壳内部储水舱3中,增加机器人重力,使得机器人下潜;同时折叠下浮体机构中的下浮体8通过折叠电机802-2反向运动变形,横向面积减小,下浮体8锁死,仿钟状体机构模拟水母游动。
44.更为具体的,振荡浮子式双浮体波浪能发电装置的原理:装置由上浮体和下浮体两部分组成,上下浮体之间可通过一定方式连接,且二者可作沿纵上下方向的相对运动,由于两个3浮体形状不同、受力不同且之间存在刚度与阻尼,二者会在波浪的作用下产生相对运动(频率/相位不同),将二者的相对运动通过本文中的发电装置转化为发电机的运动即可产生电能。
45.对于本发明:将波浪能发电装置的原理应用到了水下机器人的自供能当中,根据本文所述机器人结构:在机器人的发电模式下,由于机器人的基体外壳及其内部的仿钟状体机构、控制模块、发电装置、浮力调节模块导轨9可看作一部分并整体作为上浮体,下浮体8作为下浮体,上下浮体可沿着导轨9的方向相对运动,因此本文的机器人结构允许本机器人利用振荡浮子式双浮体波浪能发电装置的原理进行发电从而实现机器人的自供能;在运动模式下,则整个机器人可看作一个整体,即水下机器人,实现游动运动。即:将波浪能发电装置的原理与水下机器人相结合。
46.实施例2
47.本实施例2是在实施例1的基础上完成的,如图1-12所示,具体的:
48.仿钟状体机构包括上防水塑料膜7、主舵机13、隔板14、摆臂15、固定铜柱16、舵机支座17以及销18,主舵机13共有4个,每个主舵机13会通过m4螺栓与舵机支座17相连,并通过舵机支座17固定在隔板14上,摆臂15通过m3螺钉与销18固定在舵机的舵盘上,并透过外壳6侧面的开口伸出,两个舵机支座17和一个主舵机13、一个摆臂15为一组,共四组,绕着基体外壳中心轴等间隔分布;防水塑料膜7与四个摆臂15和外壳6之间用防水胶粘接固定,防水塑料膜7通过防水胶粘接并覆盖在摆臂15上形成类似于水母钟状体的形状,同时外壳6侧面用于摆臂15伸出的开口通过防水塑料膜7覆盖住以起到防水作用。
49.更为具体的,仿钟状体机构的工作原理为:由电池10供电的stm32控制板11给四个主舵机13发出pwm控制信号,摆动角度范围为0
°
到55
°
,一个运动周期总长为7s在每一个运动周期内的前2秒,主舵机13带动摆臂15首先向下摆动,在后5s缓慢回摆到初始位置并进入下一个运动周期;在此过程中,上防水塑料膜7在前两秒随着摆臂15的快速摆动而收缩,上防水塑料膜7腔内原有的水会随着收缩带来的体积变化被快速挤出形成反作用力,从而对机器人产生推力,之后在缓慢的回摆中,仿钟状体机构进入缓冲阶段,上防水塑料膜7舒张,使得其形成的腔体内水量增加,重新回到收缩前的状态,进入下一个工作循环。
50.浮力调节模块包括外联通导管19、双向水泵21以及内联通导管22,双向水泵21通过外联通导管19与外界相连,双向水泵21通过内联通导管22与储水舱3相连。
51.发电装置20包括后转轴2001、前转轴2002、联轴器2003、单向轴承2004、发电机2005、发电机底座2006、柔索2007以及发条盒2008,发电机2005通过发电机底座2006夹持并固定,发电机2005通过联轴器2003连接后转轴2001,后转轴2001内嵌有单向轴承2004、并与单向轴承2004的外圈配合并通过键连接,前转轴2002一端与单向轴承2004的内圈配合通过键连接,前转轴2002另一端与发条盒2008固连,柔索2007缠绕在前转轴2002上,柔索2007一端穿过储水舱3的中心中空部分与下浮体8中的上滑块802相连。
52.可折叠下浮体机构包括下浮体8和导轨9,下浮体8滑动连接于导轨9上;下浮体8包括下防水塑料膜801、上滑块802、上连杆803、转轴804、下连杆805以及下滑块806,下防水塑料膜801分别粘接于上滑块802和下滑块806上,上滑块802与上连杆803相连,下连杆805与下滑块806相连,上连杆803通过转轴804与下连杆805相连,上滑块802和下滑块806滑动连接于导轨9上,导轨9顶端连接于基体外壳的储水舱底板5下方。上滑块802包括上滑块外壳802-1、折叠电机802-2、联轴器802-3、蜗杆802-4、蜗轮802-5、微型电磁铁802-6以及上滑块底座802-7,折叠电机802-2连接于上滑块外壳802-1,蜗杆802-4通过联轴器802-3连接于折叠电机802-2上,蜗杆802-4与蜗轮802-5啮合,蜗轮802-5绕着上滑块外壳802-1与上连杆803相连,微型电磁铁802-6连接于上滑块底座802-7上。下滑块806包括下滑块外壳806-1和下滑块底座806-2,下滑块外壳806-1连接于下滑块底座806-2上,转轴804连接于下滑块外壳806-1上。
53.如图7、图8所示,可折叠下浮体机构的工作原理为:在需要从运动模式转为发电模式时,折叠电机802-2工作,带动蜗杆802-4转动,进而驱动与蜗杆802-4啮合的蜗轮802-5转动,由于蜗轮802-5与上连杆803固连为一体,上连杆803相对于上滑块802转动,同时带动与之铰接的下连杆805相对于下滑块806转动,在导轨9的限位作用下使得上滑块802与下滑块806沿着导轨相互靠近,其中下滑块806为钢制外壳,当上滑块802与下滑块806靠近至一定程度后,微型电磁铁802-6接通电源,将下滑块806吸住,使得上滑块802与下滑块806成为一
个共同运动的整体,此时折叠下浮体机构完全展开。在此过程中下防水塑料膜801会随着上连杆803和下连杆805的运动而发生形变,随着机构的展开,下防水塑料膜801在横向上的面积逐渐增大,承担类似阻尼板的功能,提高了发电模式下波浪作用产生的激励力;当需要从发电模式转换回运动模式时,折叠电机802-2带动蜗杆802-4反向转动,从而驱动蜗轮802-5带动上连杆803和下连杆805反向运动,上滑块802与下滑块806沿着导轨相互远离到达极限位置,此时折叠下浮体机构完全收起,下防水塑料膜801舒展,横向面积大幅减小,有利于游动模式下机器人的减阻。
54.基体外壳包括头盖1、上防水垫片2、储水舱3、下防水垫片4、储水舱底板5以及外壳6,头盖1和外壳6之间设有上防水垫片2,储水舱3连接于外壳6内部,且储水舱3顶部与头盖1相连,储水舱3底部通过下防水垫片4连接于储水舱底板5上。头盖1、外壳6具有法兰边,法兰边和上防水垫片2上有通孔,通过四个沿中心轴等间隔分布的m3*12螺栓穿过法兰边和上防水垫片2的通孔可以将头盖1、外壳6和上防水垫片2连接并紧固,同时起到防水作用。
55.控制模块包括电池10、stm32控制板11以及托板12,电池10位于stm32控制板11上方,且电池10固定在托板12上,托板12位于仿钟状体机构上方,并固定在托板12上防止在工作过程中移动。
56.利用波浪供能的水母机器人共有两种模式:运动模式和发电模式。在运动模式下,浮力调节模块中的双向水泵21通过外联通导管19将外界环境中的水吸入并通过内联通导管22排进储水舱3增加机器人重量,使得机器人下潜,折叠下浮体机构处于收起状态以减小游动阻力,同时按照所述仿钟状体机构的工作原理,利用上防水塑料膜7腔体体积变化排水产生的反作用力作为推进力驱动利用波浪供能的水母机器人前进;当机器人能量不足时,双向水泵21方向工作,通过内联通导管22将储水舱3内的水抽出,经由外联通套管19将水排出到环境中,降低机器人重力,使得机器人上浮,同时折叠下浮体机构展开,此时基体外壳和储水舱3可视为一个整体的上浮体,下浮体变为阻尼板此时机器人从运动模式转为发电模式;在波浪的作用下,上下浮体分别受到波浪的作用力产生运动,由于所设计的下浮体8的重力大于浮力,因此上滑块802会有下坠趋势使得与之连接的发电机构20中的柔索2007紧绷,发电机构20中的发条盒2008和发电机2005分别提供波浪发电系统的pto刚度和pto阻尼,使得上下浮体将产生较为明显的相对运动,进而带动柔索2007的运动,柔索2007的运动会带动前转轴2002的旋转。当下浮体8相对于上浮体向下运动时,由于单向轴承2004的内外圈在此方向可以相对转动,因此后转轴2001将不会跟随前转轴2002旋转,前转轴2002的旋转会为发条盒2008中的发条蓄力储存能量,下浮体到达极限位置后前转轴2002会在发条的弹性势能释放下反向旋转,此方向单向轴承内外圈不可相对转动,后转轴2001将跟随前转轴2002旋转并带动由联轴器2003连接的发电机2005转动,产生电能,并给上浮体和下浮体分别施加方向相对的拉力,保证上下浮体能够始终在波浪的作用下具有相对运动,实现发电功能。
57.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
58.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述
特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1