一种船舶主推进遥控方法及其系统与流程
本发明涉及船舶推进控制,具体涉及一种船舶主推进遥控方法及其系统。
背景技术:
1、船舶推进控制是船舶上的核心控制技术,主要控制船舶的动力电机系统,并完成船舶上分权控制和报警处理。
2、目前,在船舶的主推进控制过程中容易出现控制识别不稳定和反应较差的情况,导致船舶在推进过程中的控制灵敏度较差,同时现有的船舶主推进控制无法实现主推进权限的快速切换,且也不具备在船舶前进过程中对船舶推进系统进行检测和监控的功能,严重影响了船舶推进的安全性;因此,需要设计一种船舶主推进遥控方法及其系统。
技术实现思路
1、本发明的目的是克服现有技术的不足,为更好的解决目前在船舶主推进控制过程中由于容易出现控制识别不稳定和反应较差的情况,从而导致船舶在推进过程中的控制灵敏度较差,同时现有的船舶主推进控制无法实现主推进权限的快速切换,且也不具备在船舶前进过程中对船舶推进系统进行检测和监控功能的问题,提供了一种船舶主推进遥控方法及其系统,其实现了具有能根据采集的手柄数据快速转换成电机转速信号的功能,且在转换过程中还能快速切换成正车、空挡和倒车三种推进模式,同时该系统还具有在船舶推进过程中远程切换控制权的功能,且整个过程中需要人工通信就可快速切换,还实现了具有在推进过程中对船舶进行检测和输出报警信号的功能,这就使得工作人员能及时排查出系统的不稳定因素,保障了系统的安全性。
2、为了达到上述目的,本发明所采用的技术方案是:包括以下步骤,
3、步骤(a),采集手柄电压数据,并将电压数据等分后输出手柄数据;
4、步骤(b),根据输出的手柄数据转换成控制电机的转速信号,并输出当前电机转速信号;
5、步骤(c),基于输出的当前电机转速信号完成对船舶的正车或倒车控制;
6、步骤(d),判断手柄是否断线,若断线则输出转速命令信号发出报警信号;
7、步骤(e),转动控制旋钮对船舶控制权限进行切换;
8、步骤(f),检测是否存在报警信号,若存在报警信号,则采集电机转速信号和电机负荷信号,再输出报警信号和仪表指示信号;
9、步骤(g),对船舶控制运行参数进行设置,完成船舶主推进遥控作业。
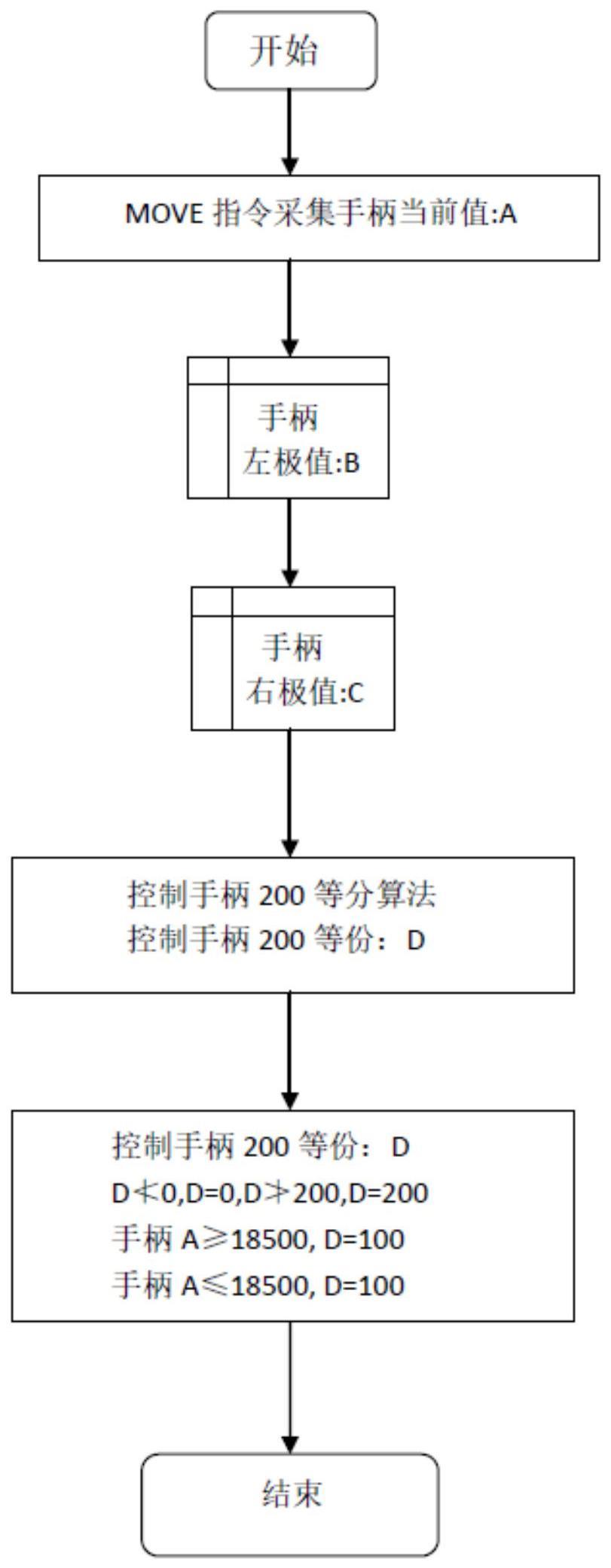
10、优选的,步骤(a),采集手柄电压数据,并将电压数据等分后输出手柄数据,具体步骤如下,
11、步骤(a1),采用move指令采集手柄当前值,并得出手柄左极值和手柄右极值,输出手柄采集值;
12、步骤(a2),将手柄采集值分成200等分,得出手柄等分值,再根据手柄等分值输出手柄数据。
13、优选的,步骤(b),根据输出的手柄数据转换成控制电机的转速信号,并输出当前电机转速信号,具体步骤如下,
14、步骤(b1),采用手柄200%程序算出驾控手柄当前200%值或集控手柄当前200%值;
15、步骤(b2),根据控手柄当前200%值或集控手柄当前200%值算出对应电机的当前转速100%值,输出命令值当前电机转速信号。
16、优选的,步骤(c),基于输出的当前电机转速信号完成对船舶的正车或倒车控制,具体步骤如下,
17、步骤(c1),当手柄当前200%值﹥105,启动正车控制,并根据当前电机转速信号进行航行;
18、步骤(c2),当手柄当前200%值﹤95,启动倒车控制,并根据当前电机转速信号进行航行;
19、步骤(c3),当95≤手柄当前200%值≤105,启动空车控制,并根据当前电机转速信号进行航行。
20、优选的,步骤(d),判断手柄是否断线,若断线则输出转速命令信号发出报警信号,具体步骤如下,
21、步骤(d1),将手柄转速反馈在倒车区间或正车区间的正车标志位或倒车标志位;
22、步骤(d2),利用手柄控制主机转速,转速监测软件监测转速命令值,并反馈电机监测转速;
23、步骤(d3),若手柄输出的当前电机转速信号与电机监测转速相同,则手柄未断线,若手柄输出的当前电机转速信号与电机监测转速不相同,则手柄断线;
24、步骤(d4),若手柄断线则输出命令值当前电机转速信号,并发出报警信号。
25、优选的,步骤(e),转动控制旋钮对船舶控制权限进行切换,具体步骤如下,
26、步骤(e1),转动控制旋钮在机旁,则控制权在机旁;
27、步骤(e2),转动控制旋钮在集控,则机旁发出集控声光提示,集控应答后,控制权由机旁转移至集控;
28、步骤(e3),转动控制旋钮在驾控,则集控发出架控声光提示,驾控应答后,控制权由集控转移至驾控;
29、步骤(e4),转动控制旋钮回集控,则驾控发出集控声光提示,集控应答后,控制权由驾控转移回集控。
30、优选的,步骤(f),检测是否存在报警信号,若存在报警信号,则采集电机转速信号和电机负荷信号,再输出报警信号和仪表指示信号,其中输出报警信号和仪表指示信号后,驾控和集控会通讯联系,并在处理后消除报警信号和仪表指示信号。
31、优选的,步骤(g),对船舶控制运行参数进行设置,完成船舶主推进遥控作业,具体设置项目包括驾控手柄左极值、驾控手柄右极值、集控手柄左极值、集控手柄右极值、电机转速怠速值、电机转速额定最高值和功率限制减少转速值。
32、一种船舶主推进遥控系统,包括手柄数据采集模块、电机转速转换模块、正车倒车控制模块、手柄断线判断模块、控制权限切换模块、报警检测模块和参数设置模块,所述手柄数据采集模块用于采集手柄电压数据,并将电压数据等分后输出手柄数据;
33、所述电机转速转换模块用于根据输出的手柄数据转换成控制电机的转速信号,并输出当前电机转速信号;
34、所述正车倒车控制模块用于基于输出的当前电机转速信号完成对船舶的正车或倒车控制;
35、所述手柄断线判断模块用于判断手柄是否断线,若断线则输出转速命令信号发出报警信号;
36、所述控制权限切换模块用于转动控制旋钮对船舶控制权限进行切换;
37、所述报警检测模块用于检测是否存在报警信号,若存在报警信号,则采集电机转速信号和电机负荷信号,再输出报警信号和仪表指示信号;
38、所述参数设置模块用于对船舶控制运行参数进行设置,完成船舶主推进遥控作业。
39、本发明的有益效果是:本发明的一种船舶主推进遥控方法及其系统,首先通过手柄数据采集模块能采集手柄电压数据,并将电压数据等分后输出手柄数据,再通过电机转速转换模块能根据输出的手柄数据转换成控制电机的转速信号,并输出当前电机转速信号,接着通过正车倒车控制模块能基于输出的当前电机转速信号完成对船舶的正车或倒车控制,再通过手柄断线判断模块能判断手柄是否断线,若断线则输出转速命令信号发出报警信号,随后通过控制权限切换模块用于转动控制旋钮对船舶控制权限进行切换,再通过报警检测模块能检测是否存在报警信号,若存在报警信号,则采集电机转速信号和电机负荷信号,再输出报警信号和仪表指示信号,最后通过参数设置模块能对船舶控制运行参数进行设置,完成船舶主推进遥控作业,有效的实现了该系统具有能根据采集的手柄数据快速转换成电机转速信号的功能,且在转换过程中还能快速切换成正车、空挡和倒车三种推进模式,同时该系统还具有在船舶推进过程中远程切换控制权的功能,且整个过程中需要人工通信就可快速切换,还实现了具有在推进过程中对船舶进行检测和输出报警信号的功能,这就使得工作人员能及时排查出系统的不稳定因素,保障了系统的安全性。
- 还没有人留言评论。精彩留言会获得点赞!