一种无人救援船的制作方法
本发明涉及无人救援船,具体为一种无人救援船。
背景技术:
1、无人救援船是一款用水面救援、消防应急物资运送的快速完成水上应急事故搜救处置工作,替代传统人力救援模式的无人船,可以在紧急情况下迅速投入行动,扩大救援能力和覆盖范围,并且,可以携带各种救援设备和物资,通过自主导航、智能控制和自动化操作,执行救援任务,提高救援行动的效率和成功率,通过多传感器协同工作,实现高效搜寻和救援,将清醒的人员从危险区域中救出,减少伤亡和损失,能够在发生事故或灾害后迅速响应,相比传统的人工搜救,无人救援船具有更快的响应速度和更高的效率,能够在最短时间内完成救援任务,为救援行动带来了新的可能性和机遇,提升了救援水平,促进了社会的安全与发展。
2、现有的无人救援船在执行救援任务时,由于定位精准度不高,导致救援延迟,使落水人员无法准确抓住船只的有效救援机构和支撑物,且无人救援船在对落水还清醒的人员进行救援时,无法提供方便抓握的支撑物,导致其再次落水或无法坚持等待救援,增加了落水人员自身的安全风险。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种无人救援船,解决了现有的无人救援船定位精度不准,无法提供落水清新人员进行抓握的支撑物,危害人身安全的问题。
3、(二)技术方案
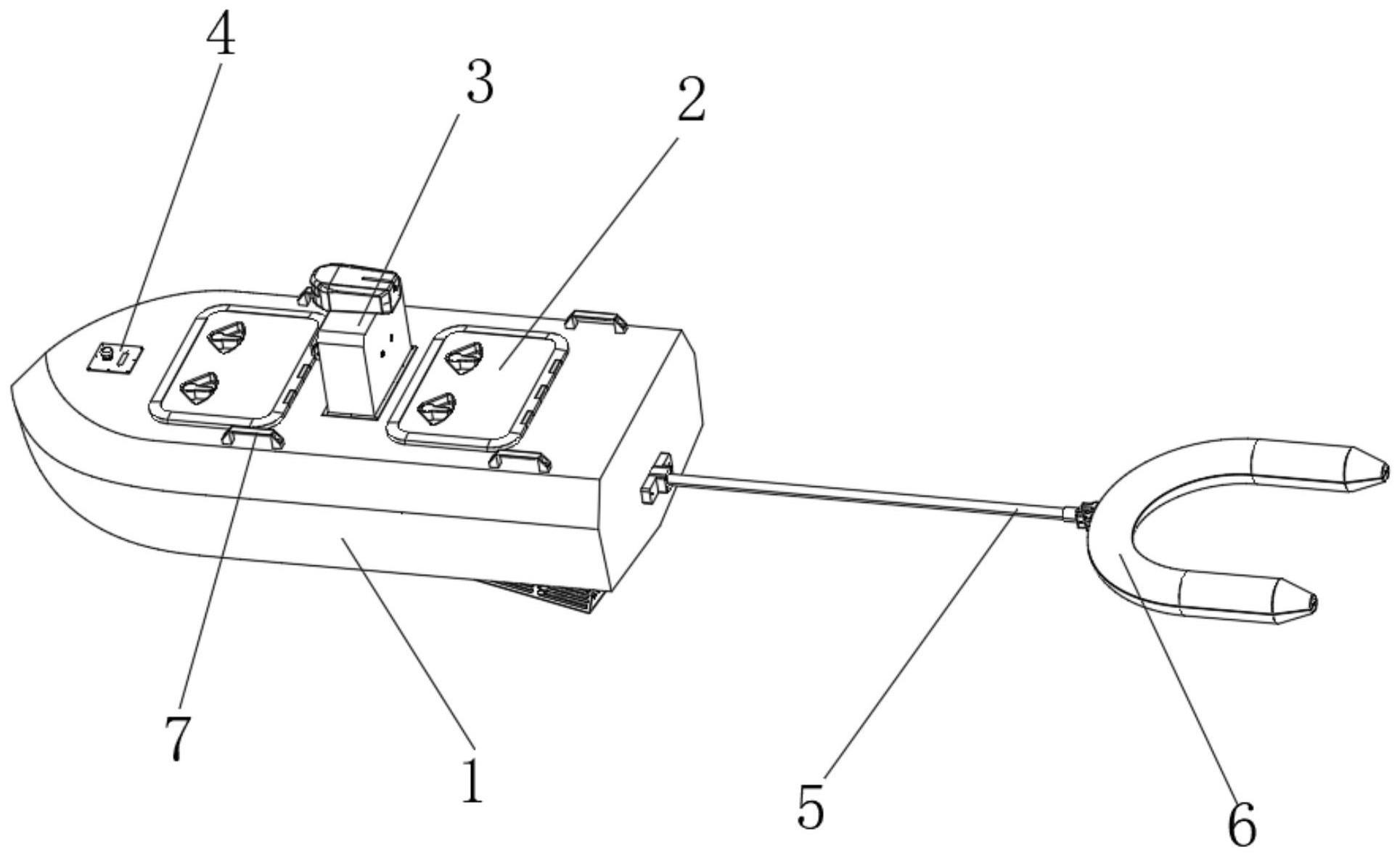
4、为实现以上目的,本发明通过以下技术方案予以实现:一种无人救援船,包括船体,所述船体的尾部底端两侧通过螺丝固定连接有隔栏,所述隔栏为耐腐蚀金属材质,所述隔栏的三角形结构,所述船体的尾端中心处固定连接有连接杆,所述连接杆远离船体的一端转动连接有u型抱箍,所述u型抱箍为pvc充气材料,所述船体的顶部两侧固定连接有若干个支撑把手,若干个所述支撑把手之间呈对称分布。
5、通过上述技术方案,可以覆盖传统救援手段难以到达的区域,如深海、复杂水域或遭受污染的区域等,将清醒的人员从这些难以到达的地方救出,提高救援的成功率。
6、优选的,所述船体的顶端表面中心处固定连接有摄像头,所述摄像头底部设置有雷达,所述摄像头的两侧设置有急救箱,所述急救箱位于船体内部,且急救箱与船体固定连接,所述船体的顶部首端设置有充电口。
7、通过上述技术方案,摄像头具有红外补光功能,可以使无人救援船在隐蔽的方式下进行监视和记录,在不引起落水人员恐慌或被救助对象注意的情况下,获取关键的救援信息。
8、优选的,所述船体的首端内部设置有蓄电池,所述蓄电池通过固定螺杆与船体内壁固定连接。
9、通过上述技术方案,可以使无人救援船更加高效地利用蓄电池的能量,提供稳定、持久的动力支持,延长船只的工作时间和续航里程。
10、优选的,所述船体的尾端内两侧设置有电机,所述电机与船体内壁固定连接,所述电机的输出端固定连接有螺旋桨,所述螺旋桨贯穿船体船壁,且螺旋桨与船体船壁转动连接。
11、优选的,所述船体内的螺旋桨之间设置有隔板,所述隔板通过固定螺杆与船体内壁固定连接。
12、通过上述技术方案,可以降低无人救援船在水中运行时所产生的噪声干扰,减少对落水人员的影响,并提供一个较为平稳和舒适的环境。
13、优选的,所述蓄电池远离船体首端的一侧设置有若干个定位器,所述定位器通过螺丝与船体内壁固定连接,若干个所述定位器之间呈对称设置。
14、通过上述技术方案,可以提供一米左右的定位范围,使得无人救援船能够快速、准确地定位事故或灾难现场。
15、优选的,所述螺旋桨的桨叶位于船体外部,所述螺旋桨的桨叶位于隔栏内,且螺旋桨与隔栏不连接。
16、通过上述技术方案,可以提供精确的操控能力,使无人救援船能够在狭窄或复杂的环境中进行精准导航和移动,有助于穿越障碍物、进入难以到达的区域,并快速响应救援任务的需求。
17、优选的,所述隔板的顶端表面固定连接有控制器,所述控制器的一侧设置有遥控器,所述遥控器与隔板固定连接。
18、工作原理:当发现落水人员通过操控设备,通过遥控器15启动蓄电池9,使得电机11工作,电机11运转带动螺旋桨12转动,使得无人救援船驶出,通过船体1上的摄像头3可实时观察水面,对落水人员进行搜救工作,当观察到落水人员时,在定位器16的作用下,可使船体1自主向落水者靠近,减少操作人员操作,有助于提高无人救援船的救援效率、安全性和协同性,为救援行动提供准确、可靠的定位支持,落水人员可通过船体1上的支撑把手7或者船体1尾部的u型抱箍6进行抓握,稳定身体位置,从而减少飘移和误差,且u型抱箍6可以提供了一个可以抓握的支撑点,使得落水人员能够更好地保持平衡和稳定,便于协助自救,后无人救援船将其落水人员带回岸边,进行救助。
19、(三)有益效果
20、本发明提供了一种无人救援船。具备以下有益效果:
21、1.本发明通过在船体两侧设置支撑把手和在船体尾端设置u型抱箍,方便落水人员通过船体上的支撑把手或者船体尾部的u型抱箍进行抓握,稳定身体位置,可以提供额外的支撑,帮助无人救援船保持平衡,同时落水人员可进行漂浮,减小呛水现象,并减少顺行和横滚的幅度,从而提高救援的安全性和成功率。
22、2.本发明通过在船体两侧设置支撑把手和在船体尾端设置u型抱箍,当落水人员位于水中时,可通过抓握船体两侧支撑把手和船体尾端的u型抱箍,在水中进行漂浮,而且当u型抱箍与船体脱离时,由于u型抱箍其本身材质可在水体表面漂浮,可使落水人员漂浮在水体表面,降低落水人员的生命危险,进而给救援人员提供充足的救援时间,设置多种救援方式,可提高对落水人员的救援成功率。
技术特征:
1.一种无人救援船,包括船体(1),其特征在于:所述船体(1)的尾部底端两侧通过螺丝固定连接有隔栏(8),所述隔栏(8)的三角形结构,所述船体(1)的尾端中心处固定连接有连接杆(5),所述连接杆(5)远离船体(1)的一端转动连接有u型抱箍(6),所述u型抱箍(6)为pvc充气材料,所述船体(1)的顶部两侧固定连接有若干个支撑把手(7),若干个所述支撑把手(7)之间呈对称分布。
2.根据权利要求1所述的一种无人救援船,其特征在于:所述船体(1)的顶端表面中心处固定连接有摄像头(3),所述摄像头(3)底部设置有雷达,所述摄像头(3)的两侧设置有急救箱(2),所述急救箱(2)位于船体(1)内部,且急救箱(2)与船体(1)固定连接,所述船体(1)的顶部首端设置有充电口(4)。
3.根据权利要求1所述的一种无人救援船,其特征在于:所述船体(1)的首端内部设置有蓄电池(9),所述蓄电池(9)通过固定螺杆(10)与船体(1)内壁固定连接,所述隔栏(8)为耐腐蚀金属或非金属材质。
4.根据权利要求1所述的一种无人救援船,其特征在于:所述船体(1)的尾端内两侧设置有电机(11),所述电机(11)与船体(1)内壁固定连接,所述电机(11)的输出端固定连接有螺旋桨(12),所述螺旋桨(12)贯穿船体(1)船壁,且螺旋桨(12)与船体(1)船壁转动连接。
5.根据权利要求1所述的一种无人救援船,其特征在于:所述船体(1)内的螺旋桨(12)之间设置有隔板(13),所述隔板(13)通过固定螺杆(10)与船体(1)内壁固定连接。
6.根据权利要求3所述的一种无人救援船,其特征在于:所述蓄电池(9)远离船体(1)首端的一侧设置有若干个定位器(16),所述定位器(16)通过螺丝与船体(1)内壁固定连接,若干个所述定位器(16)之间呈对称设置。
7.根据权利要求4所述的一种无人救援船,其特征在于:所述螺旋桨(12)的桨叶位于船体(1)外部,所述螺旋桨(12)的桨叶位于隔栏(8)内,且螺旋桨(12)与隔栏(8)不连接。
8.根据权利要求5所述的一种无人救援船,其特征在于:所述隔板(13)的顶端表面固定连接有控制器(14),所述控制器(14)的一侧设置有遥控器(15),所述遥控器(15)与隔板(13)固定连接。
技术总结
本发明提供一种无人救援船,涉及无人救援船领域。该无人救援船,包括船体,所述船体的尾部底端两侧通过螺丝固定连接有隔栏,所述隔栏为耐腐蚀金属或非金属材质,所述隔栏的三角形结构,所述船体的尾端中心处固定连接有连接杆,所述连接杆远离船体的一端转动连接有U型抱箍,所述U型抱箍为PVC充气材料,所述船体的顶部两侧固定连接有若干个支撑把手,若干个所述支撑把手之间呈对称分布。通过支撑把手和U型抱箍的使用,方便落水人员进行抓握,提高救援的安全性和成功率。
技术研发人员:张梅
受保护的技术使用者:安徽玄离智能科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!