一种果树种植用植保无人机的制作方法
1.本发明属于农业种植技术领域,具体为一种果树种植用植保无人机。
背景技术:
2.随着科学技术对于农业种植技术的发展推进,传统的农耕种植模式已逐渐被机械化的种植方式所取代,大规模机械化的农业种植模式已成为必然的发展趋势,其中,为确保农作物的正常产量在其生长的不同阶段,需要对其喷洒农药以防治病虫危害及进行除草作业,用无人机对农作物进行大规模的药物喷洒作为现有的最高效的喷洒方式,其在喷洒效率及喷洒的均匀度上是其它喷洒方式所难以企及的。
3.现有的无人机上的喷头是固定安装的,因此不能对药液进行转动喷洒,进而会造成农药喷洒范围不够大,进而会影响喷洒效率,同时无人机在使用时通常通过摄像头进行监测,由于摄像头裸露安装,进而不能对摄像头进行密封保护,导致摄像头不使用时,会造成其易受灰尘影响,进而会缩短摄像头的使用寿命。
技术实现要素:
4.针对上述情况,为克服现有技术的缺陷,本发明提供一种果树种植用植保无人机,有效的解决了上述背景技术中现有的无人机上的喷头不能对药液进行转动喷洒,进而会影响喷洒效率,同时无人机上的摄像头裸露安装,在摄像头不使用时,会造成其易受灰尘影响,进而会缩短其使用寿命的问题。
5.为实现上述目的,本发明提供如下技术方案:一种果树种植用植保无人机,包括无人机框体、机翼和摄像头本体,所述无人机框体的外壁等距离设有机翼,机翼设有四个,无人机框体的底端对称设有底座,无人机框体的内底端设有放置板,放置板的内部开设有容纳槽,放置板的顶端设有溶液箱,放置板的底端安装有保护罩,摄像头本体位于保护罩的内部,保护罩的底端开设有开口,保护罩的底端对称穿插有密封门,两个密封门的一端均延伸至底座的内部,两个密封门之间通过密封机构连接,保护罩的内部设有与摄像头本体连接的升降机构,机翼的底端均设有喷液管,喷液管的底端等距离开设有喷孔,喷液管延伸至机翼的内部,四个喷液管上均套设有锥形齿轮一,四个锥形齿轮一之间通过转动机构连接,喷液管的内部顶端均穿插有输液管,输液管的顶端均连接有输送管一,输送管一的一端均延伸至无人机框体的内部,四个输送管一的一端均连接有输送管二,四个输送管二之间通过连接环连接,连接环的底端设有传送管,传送管的一端与位于溶液箱内部的抽吸泵输出管连接;
6.转动机构包括双轴电机、旋转轴一、锥形齿轮二、旋转轴二、锥形齿轮三和锥形齿轮四,无人机框体的内壁安装有双轴电机,双轴电机输出端均连接有旋转轴一,其中一个旋转轴一上套设有位于无人机框体内部的锥形齿轮二,无人机框体的内部两侧均设有旋转轴二,两个旋转轴二均延伸至机翼的内部,两个旋转轴二相靠近一端均设有与锥形齿轮二啮合连接的锥形齿轮三,两个旋转轴一的一端与两个旋转轴二的一端均设有锥形齿轮四,锥
形齿轮四与锥形齿轮一啮合连接。
7.优选的,所述机翼的内部均设有与旋转轴一和旋转轴二连接的基座。
8.优选的,所述升降机构包括内螺纹筒、t形螺纹杆、锥形齿轮六、限位杆、限位槽、安装杆、t形螺纹杆和调节器,保护罩的内部设有内螺纹筒,内螺纹筒的顶端设有延伸至容纳槽内部的安装杆,安装杆上套设有锥形齿轮六,锥形齿轮六与调节器连接,内螺纹筒的内部穿插有与摄像头本体顶端连接的t形螺纹杆,t形螺纹杆的顶端与内螺纹筒的内壁螺纹连接,t形螺纹杆的外壁对称开设有限位槽,保护罩的内壁安装有与限位槽滑动连接的限位杆。
9.优选的,所述调节器包括传动组一和推动组,传动组一包括传动轴、锥形齿轮五和锥形齿轮十,无人机框体的内壁安装有穿插于容纳槽内部的传动轴,传动轴上套设有与锥形齿轮六啮合连接的锥形齿轮五,传动轴上套设有锥形齿轮十,锥形齿轮十与推动组连接。
10.优选的,所述推动组包括套筒、转动杆、锥形齿轮十一、锥形齿轮十二、锥形齿轮十三和推动件,无人机框体的内部设有套筒,套筒的内部转动穿插有转动杆,转动杆的底端设有与锥形齿轮十啮合连接的锥形齿轮十一,套筒的顶端设有锥形齿轮十二,其中一个旋转轴一上套设有与锥形齿轮十二啮合连接的锥形齿轮十三,套筒与推动件连接。
11.优选的,所述推动件包括电动伸缩杆、套环和推杆,无人机框体的内壁安装有电动伸缩杆,电动伸缩杆输出端连接有推杆,转动杆的外部套设有套环,套环与推杆的一端连接。
12.优选的,所述转动杆的顶端两侧对称设有凸块,套筒的内部开设有与凸块滑动卡接的滑口。
13.优选的,所述密封机构包括两个齿板、两个转动轴、两个齿轮、两个锥形齿轮八和两个传动组二,密封门的顶端均设有齿板,底座的内部安装有转动轴,转动轴上套设有齿轮和锥形齿轮八,齿轮与齿板啮合连接,锥形齿轮八与传动组二连接。
14.优选的,所述传动组二包括锥形齿轮七、联动轴和两个锥形齿轮九,传动轴上对称安装有锥形齿轮七,底座上转动安装有联动轴,联动轴的顶端和底端均设有锥形齿轮九,锥形齿轮九与锥形齿轮七和锥形齿轮八均啮合连接。
15.优选的,所述转动杆与套环之间、喷液管与机翼之间、传动轴与无人机框体之间、安装杆与放置板之间以及转动轴与底座之间均通过轴承连接。
16.与现有技术相比,本发明的有益效果是:
17.(1)、在工作中,通过设置有无人机框体、机翼、底座、放置板、溶液箱、保护罩、开口、摄像头本体、密封门和密封机构,当摄像头本体不使用时实现对开口的密封,进而可以实现对摄像头本体的密封保护;通过升降机构的设计,便于使摄像头本体穿过开口移动至保护罩的外部,进而方便摄像头本体对果树进行实时检测,有效的为工作人员控制无人机飞行提供便利;通过喷液管、喷孔和转动机构,便于实现喷液管的转动,进而实现对农药的转动喷洒,有效的增大了对农药的喷洒范围,同时提高了对果树药液的喷洒效率;
18.(2)、通过内螺纹筒、t形螺纹杆、锥形齿轮六、限位杆、限位槽、安装杆、t形螺纹杆和调节器,便于带动摄像头本体下移,进而摄像头本体会穿过开口移动至保护罩的外部,实现摄像头本体对果树的检测,进而方便工作人员操作装置在果树上方飞行,有效的为农药喷洒提供便利;
19.(3)、通过套筒、转动杆、锥形齿轮十一、锥形齿轮十二、锥形齿轮十三和推动件的设计,有效的为摄像头本体的下移和密封门的移动提供动力,进而为摄像头本体对果树的检测提供可能。
20.(4)、通过两个齿板、两个转动轴、两个齿轮、两个锥形齿轮八和两个传动组二的设计,便于控制密封门动作,进而为开口的开合提供便利。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
22.在附图中:
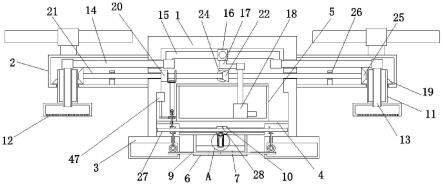
23.图1为本发明结构示意图;
24.图2为本发明外部结构示意图;
25.图3为本发明转动机构俯视结构示意图;
26.图4为本发明图1中a处的放大结构示意图;
27.图5为本发明密封机构部分结构示意图;
28.图6为本发明调节器的结构示意图;
29.图中:1、无人机框体;2、机翼;3、底座;4、放置板;5、溶液箱;6、保护罩;7、开口;8、摄像头本体;9、密封门;10、容纳槽;11、喷液管;12、喷孔;13、输液管;14、输送管一;15、输送管二;16、连接环;17、传送管;18、抽吸泵;19、锥形齿轮一;20、双轴电机;21、旋转轴一;22、锥形齿轮二;23、旋转轴二;24、锥形齿轮三;25、锥形齿轮四;26、基座;27、传动轴;28、锥形齿轮五;29、内螺纹筒;30、t形螺纹杆;31、锥形齿轮六;32、限位杆;33、限位槽;34、锥形齿轮七;35、齿板;36、转动轴;37、齿轮;38、锥形齿轮八;39、联动轴;40、锥形齿轮九;41、锥形齿轮十;42、套筒;43、转动杆;44、锥形齿轮十一;45、锥形齿轮十二;46、锥形齿轮十三;47、电动伸缩杆;48、套环;49、推杆。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.由图1至图6给出,本发明包括无人机框体1、机翼2和摄像头本体8,无人机框体1的外壁等距离设有机翼2,机翼2设有四个,无人机框体1的底端对称设有底座3,无人机框体1的内底端设有放置板4,放置板4的内部开设有容纳槽10,放置板4的顶端设有溶液箱5,放置板4的底端安装有保护罩6,摄像头本体8位于保护罩6的内部,保护罩6的底端开设有开口7,保护罩6的底端对称穿插有密封门9,两个密封门9的一端均延伸至底座3的内部,两个密封门9之间通过密封机构连接,保护罩6的内部设有与摄像头本体8连接的升降机构,机翼2的底端均设有喷液管11,喷液管11的底端等距离开设有喷孔12,喷液管11延伸至机翼2的内部,四个喷液管11上均套设有锥形齿轮一19,四个锥形齿轮一19之间通过转动机构连接,喷液管11的内部顶端均穿插有输液管13,输液管13的顶端均连接有输送管一14,输送管一14
的一端均延伸至无人机框体1的内部,四个输送管一14的一端均连接有输送管二15,四个输送管二15之间通过连接环16连接,连接环16的底端设有传送管17,传送管17的一端与位于溶液箱5内部的抽吸泵18输出管连接;
32.通过启动抽吸泵18,便于将溶液箱5内部的溶液注入传送管17中,进而注入输送管二15中,接着溶液通过输送管一14进入输液管13中,进而输液管13将溶液注入喷液管11的内部,进而使喷孔12对溶液进行喷洒,进而实现无人机对果树农药喷洒操作。
33.转动机构包括双轴电机20、旋转轴一21、锥形齿轮二22、旋转轴二23、锥形齿轮三24和锥形齿轮四25,无人机框体1的内壁安装有双轴电机20,双轴电机20输出端均连接有旋转轴一21,其中一个旋转轴一21上套设有位于无人机框体1内部的锥形齿轮二22,无人机框体1的内部两侧均设有旋转轴二23,两个旋转轴二23均延伸至机翼2的内部,两个旋转轴二23相靠近一端均设有与锥形齿轮二22啮合连接的锥形齿轮三24,两个旋转轴一21的一端与两个旋转轴二23的一端均设有锥形齿轮四25,锥形齿轮四25与锥形齿轮一19啮合连接,机翼2的内部均设有与旋转轴一21和旋转轴二23连接的基座26;
34.通过启动双轴电机20,双轴电机20会带动两个旋转轴一21转动,旋转轴一21会带动其中两个锥形齿轮四25转动,同时旋转轴一21会带动锥形齿轮二22转动,通过锥形齿轮二22与锥形齿轮三24的啮合连接关系,会使锥形齿轮三24转动,锥形齿轮三24会带动旋转轴二23转动,进而旋转轴二23会带动另外两个锥形齿轮四25转动,通过锥形齿轮四25与锥形齿轮一19的啮合连接关系,会使锥形齿轮一19转动,锥形齿轮一19会带动喷液管11转动,实现无人机对果树进行农药喷洒操作,同时实现对药液的转动喷洒,有效的增大了对农药的喷洒范围,同时提高了对果树药液的喷洒效率。
35.升降机构包括内螺纹筒29、t形螺纹杆30、锥形齿轮六31、限位杆32、限位槽33、安装杆、t形螺纹杆30和调节器,保护罩6的内部设有内螺纹筒29,内螺纹筒29的顶端设有延伸至容纳槽10内部的安装杆,安装杆上套设有锥形齿轮六31,锥形齿轮六31与调节器连接,内螺纹筒29的内部穿插有与摄像头本体8顶端连接的t形螺纹杆30,t形螺纹杆30的顶端与内螺纹筒29的内壁螺纹连接,t形螺纹杆30的外壁对称开设有限位槽33,保护罩6的内壁安装有与限位槽33滑动连接的限位杆32,调节器包括传动组一和推动组,传动组一包括传动轴27、锥形齿轮五28和锥形齿轮十41,无人机框体1的内壁安装有穿插于容纳槽10内部的传动轴27,传动轴27上套设有与锥形齿轮六31啮合连接的锥形齿轮五28,传动轴27上套设有锥形齿轮十41,锥形齿轮十41与推动组连接;
36.通过推动组的作用,便于使传动轴27转动,传动轴27会带动锥形齿轮五28转动,通过锥形齿轮五28与锥形齿轮六31的啮合连接关系,会使锥形齿轮六31转动,锥形齿轮六31会带动安装杆旋转,安装杆会带动内螺纹筒29转动,通过内螺纹筒29与t形螺纹杆30的螺纹连接关系以及配合限位杆32与限位槽33的滑动连接关系,会使t形螺纹杆30在内螺纹筒29的内壁下移,进而t形螺纹杆30会带动摄像头本体8下移,进而摄像头本体8会穿过开口7移动至保护罩6的外部,进而便于摄像头本体8对果树进行检测,进而方便工作人员操作装置在果树上方飞行,有效的为农药喷洒提供便利。
37.推动组包括套筒42、转动杆43、锥形齿轮十一44、锥形齿轮十二45、锥形齿轮十三46和推动件,无人机框体1的内部设有套筒42,这里需要注意的是,套筒42与其中一个旋转轴一21之间通过l形衔接杆连接,套筒42的内部转动穿插有转动杆43,转动杆43的底端设有
与锥形齿轮十41啮合连接的锥形齿轮十一44,套筒42的顶端设有锥形齿轮十二45,其中一个旋转轴一21上套设有与锥形齿轮十二45啮合连接的锥形齿轮十三46,套筒42与推动件连接,推动件包括电动伸缩杆47、套环48和推杆49,无人机框体1的内壁安装有电动伸缩杆47,电动伸缩杆47输出端连接有推杆49,转动杆43的外部套设有套环48,套环48与推杆49的一端连接,转动杆43的顶端两侧对称设有凸块,套筒42的内部开设有与凸块滑动卡接的滑口;
38.通过启动电动伸缩杆47,电动伸缩杆47带动推杆49下移,推杆49会带动套环48下移,套环48会带动转动杆43下移,转动杆43会带动凸块在滑口中滑动并下移,进而转动杆43会带动锥形齿轮十一44下移,并使锥形齿轮十一44与锥形齿轮十41啮合连接,接着通过双轴电机20动作,会使旋转轴一21转动,旋转轴一21会带动锥形齿轮十三46转动,通过锥形齿轮十三46与锥形齿轮十二45的啮合连接关系,会使锥形齿轮十二45转动,锥形齿轮十二45带动套筒42转动,通过凸块与滑口的作用,会使套筒42带动转动杆43转动,转动杆43带动锥形齿轮十一44转动,进而锥形齿轮十一44会带动锥形齿轮十41转动,锥形齿轮十41会带动传动轴27转动,有效的为升降机构和密封机构的动作提供动力,进而方便摄像头本体8升降。
39.密封机构包括两个齿板35、两个转动轴36、两个齿轮37、两个锥形齿轮八38和两个传动组二,密封门9的顶端均设有齿板35,底座3的内部安装有转动轴36,转动轴36上套设有齿轮37和锥形齿轮八38,齿轮37与齿板35啮合连接,锥形齿轮八38与传动组二连接,传动组二包括锥形齿轮七34、联动轴39和两个锥形齿轮九40,传动轴27上对称安装有锥形齿轮七34,底座3上转动安装有联动轴39,联动轴39的顶端和底端均设有锥形齿轮九40,锥形齿轮九40与锥形齿轮七34和锥形齿轮八38均啮合连接,转动杆43与套环48之间、喷液管11与机翼2之间、传动轴27与无人机框体1之间、安装杆与放置板4之间以及转动轴36与底座3之间均通过轴承连接;
40.传动轴27旋转会带动锥形齿轮七34转动,通过锥形齿轮七34与锥形齿轮九40的啮合连接关系,会使锥形齿轮九40转动,锥形齿轮九40会带动联动轴39转动,两个联动轴39会使另外两个锥形齿轮九40转动,进而通过锥形齿轮九40与锥形齿轮八38的啮合连接关系,会使锥形齿轮八38转动,锥形齿轮八38会带动转动轴36转动,转动轴36会带动齿轮37转动,通过齿轮37与齿板35的啮合连接关系,会使密封门9在保护罩6上滑动,进而会使两个密封门9脱离对开口7的密封,进而便于为摄像头本体8的下移提供可能,进而为摄像头本体8对果树检测提供可能。
41.工作原理:工作时,工作人员在溶液箱5中注入农药,接着控制无人机飞起,通过启动电动伸缩杆47,电动伸缩杆47带动推杆49下移,推杆49会带动套环48下移,套环48会带动转动杆43下移,转动杆43会带动凸块在滑口中滑动并下移,进而转动杆43会带动锥形齿轮十一44下移,并使锥形齿轮十一44与锥形齿轮十41啮合连接;
42.接着启动双轴电机20动作,会使两个旋转轴一21转动,其中一个旋转轴一21会带动锥形齿轮十三46转动,通过锥形齿轮十三46与锥形齿轮十二45的啮合连接关系,会使锥形齿轮十二45转动,锥形齿轮十二45带动套筒42转动,通过凸块与滑口的作用,会使套筒42带动转动杆43转动,转动杆43带动锥形齿轮十一44转动,进而锥形齿轮十一44会带动锥形齿轮十41转动,锥形齿轮十41会带动传动轴27转动,传动轴27旋转会带动锥形齿轮七34转动,通过锥形齿轮七34与锥形齿轮九40的啮合连接关系,会使锥形齿轮九40转动,锥形齿轮
九40会带动联动轴39转动,两个联动轴39会使另外两个锥形齿轮九40转动,进而通过锥形齿轮九40与锥形齿轮八38的啮合连接关系,会使锥形齿轮八38转动,锥形齿轮八38会带动转动轴36转动,转动轴36会带动齿轮37转动,通过齿轮37与齿板35的啮合连接关系,会使密封门9在保护罩6上滑动,进而会使两个密封门9脱离对开口7的密封,使开口7打开;
43.同时传动轴27转动会带动锥形齿轮五28转动,通过锥形齿轮五28与锥形齿轮六31的啮合连接关系,会使锥形齿轮六31转动,锥形齿轮六31会带动安装杆旋转,安装杆会带动内螺纹筒29转动,通过内螺纹筒29与t形螺纹杆30的螺纹连接关系以及配合限位杆32与限位槽33的滑动连接关系,会使t形螺纹杆30在内螺纹筒29的内壁下移,进而t形螺纹杆30会带动摄像头本体8下移,进而摄像头本体8会穿过开口7移动至保护罩6的外部,进而便于摄像头本体8对果树进行检测,进而方便工作人员操作装置在果树上方飞行,有效的为农药喷洒提供便利;
44.且旋转轴一21转动会带动其中两个锥形齿轮四25转动,同时旋转轴一21会带动锥形齿轮二22转动,通过锥形齿轮二22与锥形齿轮三24的啮合连接关系,会使锥形齿轮三24转动,锥形齿轮三24会带动旋转轴二23转动,进而旋转轴二23会带动另外两个锥形齿轮四25转动,通过锥形齿轮四25与锥形齿轮一19的啮合连接关系,会使锥形齿轮一19转动,锥形齿轮一19会带动喷液管11转动,接着启动抽吸泵18,便于将溶液箱5内部的溶液注入传送管17中,进而注入输送管二15中,接着溶液通过输送管一14进入输液管13中,进而输液管13将溶液注入喷液管11的内部,进而使喷孔12对溶液进行喷洒,实现无人机对果树进行农药喷洒操作,同时实现对药液的转动喷洒,有效的增大了对农药的喷洒范围,同时提高了对果树药液的喷洒效率。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
46.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1