一种气冲减震式飞行器辅助降落结构及其使用方法与流程
本发明一种气冲减震式飞行器辅助降落结构及其使用方法涉及一种能够提高飞行器降落的抗震性能的辅助降落结构及其使用方法,属于飞行器辅助降落,特别涉及一种通过多级减震气囊和阻尼减震结构辅助飞行器降落的结构及其使用方法,能够提高飞行器降落的抗震性能,以适应不同的地形、地面条件,降落安全性高。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机体积小、造价低、使用方便,被广泛应用于城市管理、农业、地质、气象、电力、抢险救灾以及视频拍摄等行业,现有的无人机是通过起落架支撑降落,落地时由于重力作用会在地面上发生反弹,而反弹的震动力容易损坏无人机的内部零件,抗震性能差,对降落地面的地形、地面条件要求高,降落安全性低。
2、公告号cn214397206u公开了一种无人机降落减震缓冲机构,包括无人机本体,以及安装在无人机本体下方的减震缓冲机构,所述减震缓冲机构包括有对称分布在无人机本体下方的缓冲板,所述缓冲板两端设有与无人机相抵的支撑件,所述缓冲板顶部对称铰接有第一连杆,所述无人机本体底部铰接有第二连杆,所述第一连杆和第二连杆之间设有压缩弹簧。上述无人机能够实现两级减震效果,防止无人机因震动受损。但是上述无人机降落时,所述缓冲板下方的支撑层与地面的接触面积小,减震效果差,缓冲板没有弹力,不能适应复杂的地形和地面条件,压缩弹簧受力大,容易损坏;且在无人机飞行时,缓冲板不能收缩,无人机的负重大,影响无人机飞行。
技术实现思路
1、为了改善上述情况,本发明一种气冲减震式飞行器辅助降落结构及其使用方法提供了一种通过多级减震气囊和可收缩的阻尼减震结构辅助飞行器降落的结构及其使用方法,能够提高飞行器降落的抗震性能,以适应不同的地形、地面条件,降落安全性高。
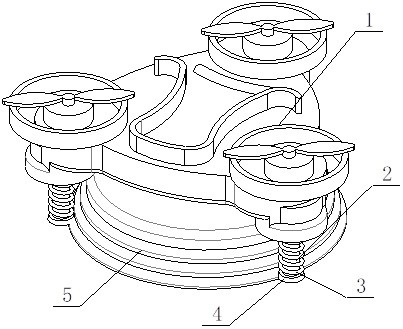
2、本发明一种气冲减震式飞行器辅助降落结构及其使用方法是这样实现的:本发明一种气冲减震式飞行器辅助降落结构由飞行器主体、阻尼减震器、减震弹簧、减震地触、多级减震气囊、进气孔、气冲箱、气冲支撑管、气冲孔、转动支架以及转动电机组成,
3、转动支架有多个,
4、所述转动支架置于飞行器主体的底面,
5、所述转动支架通过转轴与阻尼减震器的一端转动连接,
6、所述转动支架通过转轴与转动电机的电机轴相连接,
7、减震地触的顶面置于所述阻尼减震器的另一端,
8、所述阻尼减震器的直径小于所述减震地触的直径,
9、减震弹簧缠绕于所述阻尼减震器的侧面,
10、气冲箱的顶面置于飞行器主体底面的中心位置,
11、气冲箱的侧面开有多个进气孔,
12、优选的,多个所述进气孔沿所述气冲箱的侧面周向等距排列,
13、气冲箱的底面与气冲支撑管的一端相连通,
14、抽吸气泵置于气冲箱内,
15、多级减震气囊的横截面为梯形结构,
16、所述多级减震气囊套置于所述气冲支撑管上,
17、所述气冲支撑管的另一端置于所述多级减震气囊的内底面,
18、所述气冲支撑管的侧面开有多个气冲孔,
19、优选的,多个所述气冲孔沿所述气冲支撑管的长度方向等距排列,
20、所述减震地触的底面与所述多级减震气囊的底面相连接,
21、所述多级减震气囊的内壁上置有压力传感器,所述飞行器主体内置有信号转换器,所述飞行器主体内置有数据处理器,所述飞行器主体内置有控制器,
22、所述压力传感器通过数据传输线和所述信号转换器相连接,
23、所述旋转电机通过数据传输线和所述控制器相连接,
24、所述抽吸气泵通过数据传输线和所述控制器相连接,
25、所述信号转换器通过数据传输线和所述数据处理器相连接,所述数据处理器通过数据传输线和所述控制器相连接,
26、所述信号转换器能够将所述压力传感器采集到的压力数据的电信号转化为数字信号,
27、所处控制器可以被一个或至少两个应用专用集成电路(asic)、可编程逻辑器件(pld)、现场可编程门阵列(fpga)、控制器、微控制器、微处理器或其他电子组件实现,用于执行数据处理装置的指令,
28、所述数据处理器和所述信号转换器进行信息交互,所述数据处理器内存储有计算机可读存储介质,所述计算机可读存储介质被执行时实现以下步骤:
29、飞行器起飞时:对接收到的所述压力传感器的压力数据的数字信号进行处理,并将处理好的所述压力数据的数字信号与预设的空气压力进行对比,当所述压力数据的数字信号大于预设的空气压力时,给所述控制器发送执行指令,所述控制器控制所述旋转电机进行转动,所述旋转电机带动所述阻尼减震结构收回,由于所述多级减震气囊和所述阻尼减震结构相连接,所述阻尼减震结构收回时能够使所述多级减震气囊挤压收缩实现放气;所述控制器控制所述抽吸气泵通过所述气冲孔将所述多级减震气囊中的空气抽出,空气通过所述气冲支撑管进入所述气冲箱,从所述进气孔排出,使所述多级减震气囊收缩实现放气,所述多级减震气囊内的压力数据开始减小,当所述压力数据的数字信号等于预设的空气压力时,给所述控制器发送执行指令,所述控制器控制所述旋转电机停止转动;
30、飞行器降落时:所述控制器控制所述旋转电机进行转动,所述旋转电机带动所述阻尼减震结构进行伸展,所述控制器控制所述抽吸气泵通过所述进气孔吸入空气,空气从所述气冲箱进入所述气冲支撑管,通过所述气冲孔给所述多级减震气囊充气,使所述多级减震气囊膨胀,所述多级减震气囊内的压力数据开始增大,对接收到的所述压力传感器的压力数据的数字信号进行处理,并将处理好的所述压力数据的数字信号与预设的充气压力进行对比,当所述压力数据的数字信号等于预设的充气压力时,给所述控制器发送执行指令,所述控制器控制所述抽吸气泵停止工作,
31、优选的,所述数据处理器和飞行器控制系统建立信号交互;
32、进一步的,所述多级减震气囊的底面均匀置有多个耐磨凸起;
33、优选的,所述耐磨凸起为半球形结构;
34、进一步的,所述减震地触的底面均匀置有多个抓地齿;
35、优选的,所述抓地齿为三棱柱结构,且棱朝向外侧。
36、本发明一种气冲减震式飞行器辅助降落结构的使用方法,包括以下几个步骤:
37、(1)飞行器飞行时:所述压力传感器采集所述多级减震气囊内的压力数据,所述压力传感器将采集到的所述压力数据传输给所述信号转换器,所述信号转换器将所述压力数据的电信号转换为数字信号,所述信号转换器将所述压力数据的数字信号传输给所述数据处理器,所述数据处理器对接收到的所述压力传感器的压力数据的数字信号进行处理,并将处理好的所述压力数据的数字信号与预设的空气压力进行对比,当所述压力数据的数字信号大于预设的空气压力时,给所述控制器发送执行指令,所述控制器控制所述旋转电机进行转动,所述旋转电机带动所述阻尼减震结构收回,由于所述多级减震气囊和所述阻尼减震结构相连接,所述阻尼减震结构收回时能够使所述多级减震气囊挤压收缩实现放气;所述控制器控制所述抽吸气泵通过所述气冲孔将所述多级减震气囊中的空气抽出,空气通过所述气冲支撑管进入所述气冲箱,从所述进气孔排出,使所述多级减震气囊收缩实现放气。所述多级减震气囊内的压力数据开始减小,当所述压力数据的数字信号小于预设的空气压力时,所述数据处理器给所述控制器发送执行指令,所述控制器控制所述旋转电机停止转动。所述阻尼减震结构和所述多级减震气囊收缩在飞行器底部,不影响飞行器的正常飞行;
38、(2)飞行器降落时:所述控制器控制所述旋转电机进行转动,所述旋转电机带动所述阻尼减震结构进行伸展,所述控制器控制所述抽吸气泵通过所述进气孔吸入空气,空气从所述气冲箱进入所述气冲支撑管,通过所述气冲孔给所述多级减震气囊充气,使所述多级减震气囊膨胀,所述多级减震气囊内的压力数据开始增大,所述压力传感器采集所述多级减震气囊内的压力数据,所述压力传感器将采集到的所述压力数据传输给所述信号转换器,所述信号转换器将所述压力数据的电信号转换为数字信号,所述信号转换器将所述压力数据的数字信号传输给所述数据处理器,所述数据处理器对接收到的所述压力数据的数字信号进行处理,并将处理好的所述压力数据的数字信号与预设的充气压力进行对比,当所述压力数据的数字信号等于预设的充气压力时,给所述控制器发送执行指令,所述控制器控制所述抽吸气泵停止工作。飞行器降落时,所述多级减震气囊和所述阻尼减震结构能够提高飞行器降落的抗震性能,降低飞行器对降落地面的要求,以适应不同的地形、地面条件,降落的安全性高。
39、有益效果
40、一、通过多级减震气囊和阻尼减震结构辅助飞行器降落,能够提高飞行器降落的抗震性能。
41、二、多级减震气囊和阻尼减震结构辅助飞行器降落,能够适应不同的地形、地面条件,降落安全性高。
42、三、结构简单,方便实用。
43、四、成本低廉,便于推广。
- 还没有人留言评论。精彩留言会获得点赞!