升降装置用摆动轴、包括这种轴的升降装置和控制方法与流程
[0001]
本发明涉及一种用于升降装置的摆动轴、一种包括这种轴的升降装置以及一种控制这种升降装置的方法。
背景技术:
[0002]
特别是如ep1414733或cn104528609中所述,诸如高空作业平台的升降装置可以配备有摆动轴,从而可以在不平坦的地形上保持与地面的接触,以保持机器的稳定性。这些摆动轴包括每个端部处安装有轮子的桥以及用于将车辆底盘和桥相连接的千斤顶。千斤顶可以是双动式的:其中在升降结构降低的吊舱位移构造中,千斤顶在两个方向上的平移都是自由的,从而允许轴自由摆动,而在升高的构造中,千斤顶的位置被锁定并且轴被卡住。
[0003]
千斤顶也可以是与双动式千斤顶相比可以进行额外的管理(一个或另一个千斤顶进行锁定/解锁,并且不再同时进行)的单动类型。因此,在升高的平台平移模式中,在底盘倾斜度发生不利变化的情况下,可以仅在底盘的稳定方向上允许轴进行摆动(返回到0
°
倾斜位置)。这种模式防止了恶化方向上的摆动,并确保机器的四个轮子与地面永久接触。好处是机器对地形变化的适应性更好,并且由于四个轮子能够保持与地面的永久接触因此大大减少了底盘配重。
[0004]
通过借助于由机器控制单元控制的电磁阀限制来自千斤顶控制回路的液压流体而卡住千斤顶。在这些电磁阀中的一个发生未检测到的失效的情况下,千斤顶可能会在地面行驶构造下保持被卡住,从而导致车轮失去与地面的接触。在抬升阶段,如果平台上的载荷或机器的重心朝未支撑在地面上的轮子移动,则机器可能会倾翻。
技术实现要素:
[0005]
本发明旨在通过提出一种新型摆动轴来补救这些缺点,该摆动轴可以检测对升降装置的稳定性有潜在危险的故障。
[0006]
为此,本发明涉及一种用于升降装置的摆动轴,其中所述摆动轴包括:
[0007]
轴桥,其端部安装有两个接地连接件;
[0008]
摆动轴线;
[0009]
左千斤顶和右千斤顶,每个千斤顶都具有与桥接触的杆以及固定在升降装置的底盘的固定部分上的主体,该主体形成杆在其中移动的腔室;
[0010]
液压回路,其将左千斤顶和右千斤顶的腔室互连,其中存在给定压力下的流体,从而能够将左千斤顶和右千斤顶的杆压靠在桥上;
[0011]
位于连接至左千斤顶的腔室的液压回路的分支上的至少一个电磁阀以及位于连接至右千斤顶的腔室的液压回路的分支上的至少一个电磁阀,其中这些电磁阀各自能够定位在流体能够自由流动的打开位置以及流体被限制在对应的千斤顶的腔室中的关闭位置。
[0012]
所述摆动轴的特征在于,左千斤顶和右千斤顶的腔室各自包括用于测量每个腔室中的流体压力的压力传感器,并且控制装置被设置为检测其中一个腔室中的大于第一阈值
的压力和/或每个腔室中的压力之间的大于第二阈值的差值,从而检测关闭位置的电磁阀是否阻塞,并启动安全程序。
[0013]
根据本发明,能够检测将千斤顶卡在适当位置的电磁阀的失效,从而能够启动安全程序,并且防止升降装置在抬升操作期间处于不稳定状态。
[0014]
根据本发明的有利的但非强制性的方面,这种摆动轴可以包含通过任何技术上可行的组合考虑的以下一个或多个特征:
[0015]-控制装置被设计为在超过其中一个压力阈值的情况下向升降装置的操作者或周围环境发出警告信号。
[0016]-控制装置被设计为禁止升降装置的特定功能。
[0017]-在升降装置的侧倾阶段期间以及在升降装置的抬升阶段之前检测千斤顶的腔室中的压力。
[0018]
本发明还涉及一种包括至少一个如上所述的摆动轴的升降装置。
[0019]
本发明还涉及一种用于控制包括至少一个摆动轴的升降装置的方法,其中所述摆动轴包括:
[0020]
轴桥,其每个端部处具有轮子;
[0021]-摆动轴线;
[0022]-左千斤顶和右千斤顶;左千斤顶和右千斤顶各自具有与桥接触的杆以及固定在升降装置的底盘上的主体,该主体形成杆在其中移动的腔室;
[0023]-液压回路,其将左千斤顶和右千斤顶的腔室互连,其中存在给定压力下的流体,从而能够将左千斤顶和右千斤顶的杆压靠在桥上;
[0024]-位于连接至左千斤顶的腔室的液压回路的分支上的至少一个电磁阀,以及位于连接至右千斤顶的腔室的液压回路的分支上的至少一个电磁阀,这些电磁阀各自能够定位在流体能够自由流动的打开位置以及流体被限制在对应的千斤顶的腔室中的关闭位置。
[0025]
所述方法包括:步骤a),包括测量左千斤顶和右千斤顶的每个腔室中的流体的压力;步骤b),包括确定其中一个腔室中的压力是否大于第一阈值和/或确定每个腔室中的压力之间的差值是否大于第二阈值,从而发出电磁阀在关闭位置受到阻塞的信号;以及步骤c),包括在发生步骤b)中的一种情况时启动安全程序。
[0026]
根据本发明的有利的但非强制性的方面,这种控制方法可以包含通过任何技术上可行的组合考虑的以下一个或多个特征:
[0027]-步骤a)和步骤b)在升降装置的侧倾阶段期间以及在抬升阶段之前执行。
[0028]-在步骤c)中,安全程序至少包括:向升降装置的操作者或周围环境发出警告信号,或者禁止升降装置的特定功能。
附图说明
[0029]
基于下面根据参照附图通过非限制性例子给出的原理对升降装置的摆动轴和控制方法进行的说明,将更好地理解本发明,并且本发明的其他优点将变得更加显而易见,在附图中:
[0030]
图1是根据本发明的摆动轴的示意图;
[0031]
图2是在不平坦地面上驾驶的构造下的图1的摆动轴的示意图;
[0032]
图3是失效构造下的图1的摆动轴的示意图。
具体实施方式
[0033]
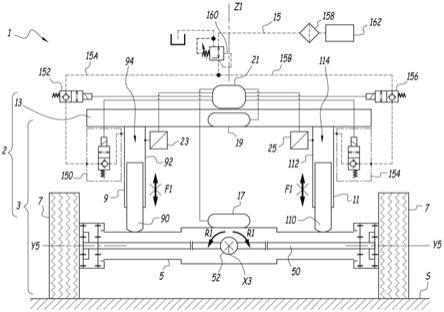
图1至图3示出了升降装置1,例如升降平台,其包括:下部,其具有底盘2和与地面连接的构件;以及对平台(未被示出)进行支撑的升降结构(未被示出)。该升降结构可以是包括伸缩部分和铰接部分的类型,或者是“剪叉”类型。
[0034]
在传统例子中,下部包括以轮子7的形式与地面连接的四个构件。底盘2包括固定部分13和至少一个摆动轴,在图1中用附图标记3示出了后者的其中一个。轮子7两两安装在轴上。固定部分13相对于升降装置1的竖直轴线z1是固定的。
[0035]
摆动轴3包括桥5,其在每个端部处具有轮子7。桥5是支撑轮子7的机械结构,包括传动杆50,其用于使轮子7旋转并且还能够改变作为机器1的转向指令的一部分的轮子7的取向。
[0036]
摆动轴3可以围绕轴线x3旋转并且由位于桥5中心处的摆动杆52支撑。轴线x3垂直于车辆1的竖直轴线并且垂直于桥5的中心轴线y5。当桥5相对于固定部分13摆动时,轴线y5围绕轴线x3枢转,如箭头r1所示。
[0037]
摆动轴3具有两个千斤顶,分别为左千斤顶9和右千斤顶11,它们的功能是控制桥5的摆动并确保轮子7支撑在地面s上。
[0038]
千斤顶9和11分别具有与桥5进行接触的杆90和110以及固定在底盘2的固定部分13上的主体92和112。主体92和112各自形成杆90或110在其中移动的腔室94和114。
[0039]
摆动轴3包括配备有过滤器158和加压流体源162的液压回路15。回路15供应的流体借助于分支15a和15b上游的减压器160保持压力恒定。处于恒定压力下(称为增压压力)的油注入左千斤顶9和右千斤顶11的腔室94和114,并保持杆90和110压靠在桥5上。
[0040]
液压回路15包括设置在连接至左千斤顶9的腔室94的、液压回路15的第一分支15a上的至少一个电磁阀150,以及设置在连接至右千斤顶11的腔室114的、液压回路15的第二分支15b上的至少一个电磁阀154。这些电磁阀150和154各自能够定位在流体能够自由流动的打开位置(图2)和流体被限制在对应的千斤顶9或11的腔室94或114中的关闭位置(图1)。
[0041]
在图1中,电磁阀150和154处于关闭位置:流体只能进入腔室94和114而不能从其中离开。在图2中,电磁阀150和154处于打开位置:流体可以自由地进入或离开腔室94和114。千斤顶9和11是单动式的。
[0042]
根据一个可选方面,分支15a和15b可各自包括附加的电磁阀152或156,其操作与电磁阀150和154的操作同步。这些附加的电磁阀152和156提供了提高液压回路15的安全性的冗余度。
[0043]
左千斤顶9和右千斤顶11的腔室94和114各自包括被设计为分别测量这些腔室94和114中的流体的压力p9或p11的相应的压力传感器23和25,同时摆动轴3包括与压力传感器23和25连接的控制装置。这些控制装置例如是控制单元21的形式。控制单元21被设计为检测腔室94和114的其中一个中的压力p9或p11是否大于第一阈值p1,和/或检测各腔室94和114中的压力p9和p11之间的差值δp是否大于第二阈值p2。如果压力p9或p11大于p1或者如果差值δp大于p2,则表明电磁阀150和154中的一个在关闭位置受阻塞。在这种情况下,控制单元21被设计为启动安全程序。
[0044]
控制单元21还连接至电磁阀150、152、154和156,并对这些电磁阀进行电控制。电磁阀150、152、154和156在默认情况下通过弹簧保持在关闭位置。由控制单元21施加的电控制包括向它们供应电流以使它们进入打开位置。
[0045]
摆动轴3还包括固定在桥5上的倾斜传感器17和固定在固定部分13上的倾斜传感器19。由传感器17和19测得的倾斜度被传送到控制单元21,并指示桥5相对于固定部分13的倾斜度。
[0046]
控制单元21被设计为在超过阈值p1和p2中的一个的情况下向升降装置1的操作者或周围环境发出警告信号。例如,控制单元21可以控制升降装置1的声音系统以在具有操作员的平台中发出警告信号,或者控制位于结构的下部上并用于附近人员的声音系统。警告信号也可以是屏幕上的错误消息的形式。
[0047]
控制单元21还被设计为禁止升降装置1的特定功能。例如,控制单元21连接至升降装置的通用控制器(未被示出),并且可以传送用于减小可达到的位移速度的控制信号或用于减小升降结构的某些部分的位移程度或者甚至完全禁止升降的信号。
[0048]
摆动轴3、引申来说升降装置1如下进行操作。
[0049]
在图1所示的第一种锁定构造中,电磁阀150、152、154和156不通电。因此,电磁阀处于关闭位置,因此流体无法从腔室94和114中逸出。千斤顶9和11因此被卡住,如图1中禁止的双箭头f1所示,因此摆动轴3被锁定。
[0050]
在液压回路15中使用增压压力以保持千斤顶9和11搁置在桥5上。电磁阀在千斤顶9和11的任何状态下(被供应或不被供应)始终在向千斤顶9和11供应的方向上打开。
[0051]
如果升降装置1在轴3锁定的情况下在地面上移动,则角度传感器17(轴)和19(底盘)不会相对于彼此变化,或者总是在相同的意义上变化。
[0052]
这种锁定构造适合于停车或升降结构的抬升阶段。
[0053]
在第二种“半锁定”构造中,可以仅在底盘的稳定方向上允许轴摆动(返回到0
°
倾斜位置)。因此,控制单元21能够根据由倾斜传感器17和19返回的数据来分别控制电磁阀150/152和154/156。然后可以关闭电磁阀以卡住其中一个千斤顶9或11,以使倾斜度不能增加。
[0054]
在图2所示的第三种解锁构造中,电磁阀通电并因此打开。流体可以自由进入和离开腔室94和114:千斤顶9和11可以自由移动,如图2中的双箭头f2所示。因此,摆动轴3解锁,这意味着摆动轴能够遵循地面的不平整部分,例如,岩石r可能导致桥5相对于固定部分13倾斜。
[0055]
当在摆动轴未锁定的情况下在地面上移动时,倾斜传感器17和19的测量结果相对于彼此变化。
[0056]
两个腔室94和114以相同的压力连接在一起。传感器23和25指示接近用于充满千斤顶9和11的压力的、相同的压力p9和p11。
[0057]
在这种构造中,例如在升降装置1的侧倾阶段期间以及在升高升降结构之前,控制单元21对压力p9和p11进行分析。
[0058]
在图3中,在解锁构造中发生故障。电磁阀正常通电且处于打开位置。然而,电磁阀152在关闭位置保持受到阻塞(电源故障,或者例如在将电磁阀安装在其腔室中时施加过大的扭矩时而导致阀保持阻塞)。
[0059]
然后,流体被限制在腔室94中,并因此当升降装置1可能处于不平坦的地面上或者在遇到不平整部分之后返回到平整的地面时千斤顶9保持被卡住。轴3仅能在一个方向上摆动,这存在使一个轮子7失去与地面的接触的风险。在图3的情况下,桥5相对于地面的定向将需要顺时针旋转,从而使右轮可重新与地面接触。然而,千斤顶9在缩回方向上被卡住,如禁止的向上箭头f3所示。这种顺时针旋转无法进行,右轮保持抬起,从而失去与地面的接触。千斤顶9只能在箭头f4的方向上向下延伸,这会加剧不平衡。如果升降装置1此时停止并开始抬升阶段,则可能会产生不稳定和倾翻的危险。
[0060]
在这种失效情况下,压力传感器23和25在位移阶段期间指示不同的压力p9和p11。传感器23将特别地测量比常规测得的增压压力更大的压力p9,因为被限制在腔室94中的流体不能够再逸出,并且压力在由桥5施加在杆90上以使流体进入腔室94中的力的作用下增大。因此,通过大于第一阈值p1的压力p9或通过超过第二阈值p2的压力差值δp检测到失效。举例来说,压力阈值p1可以等于25巴,而压差阈值p2可以例如等于15巴。压力阈值p1可以取决于增压压力。总的来说,压力阈值p1必须大于增压压力,例如设定+10巴的增压压力。
[0061]
控制单元21还可以测量阈值发生交叉的时间。例如,如果超过阈值的持续时间不超过25ms,则无需考虑这种过冲。
[0062]
对失效的这种检测可以确保在抬升阶段之前在位移阶段期间摆动轴3的正确操作。如果在位移阶段期间检测到异常,则禁止轮子抬起,并将故障报告给操作员以及进行机器诊断。因此,在可能导致危险后果之前检测到并报告失效。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1