一种高速长距离拖链自动纠偏设备的制作方法
[0001]
本实用新型涉及自动纠偏技术领域,具体涉及一种高速长距离拖链自动纠偏设备。
背景技术:
[0002]
拖链是于1953年由德国人发明,1954年开始投向市场,拖链种类很多,分为塑料拖链、工程拖链、钢铝拖链、钢制拖链、桥式全封闭式拖链等,由材质可分为可分为钢制拖链、钢铝拖链、塑料拖链、不锈钢拖链、尼龙拖链等。
[0003]
拖链外形似坦克链,由众多的单元链接组成,链接之间转动自如,单元链节由左右链板和上下盖板组成,拖链每节都能打开,装拆方便,不必穿线,打开盖板后即可把电缆、油管、气管、水管等放入拖链;同时拖链具有较高的压力和抗拉负荷,良好的韧性、高弹性和耐磨性,阻燃,高低温时性能稳定,可以使用在室外,且耐油、耐盐,并有一定的耐酸、耐碱能力,运行寿命长。
[0004]
目前工业生产中拖链的应用十分广泛,当水管或是电线放入拖链内部时,拖链带动其运转,从而保护了内部线路和管路,当拖链进行长时间的运行时,往往会左右移动出现偏差,影响内部线路或是管路的输送,当前的处理方法大都是人工进行处理,占用工作人员的时间,而且时间一长会产生疲劳,因而有必要设计一种高速长距离拖链自动纠偏设备。
技术实现要素:
[0005]
本实用新型的目的在于提供一种高速长距离拖链自动纠偏设备。
[0006]
为达此目的,本实用新型采用以下技术方案:
[0007]
提供一种高速长距离拖链自动纠偏设备,包括底座,还包括支撑架、工作台、控制器、安装台、间歇推送机构和往复摆动机构,所述支撑架包括四根支撑杆和一对条形杆,所述四根支撑杆呈竖直状态两两对称设置于底座上,所述一对条形杆对称设置于四根支撑杆的顶部,所述工作台固定设置于一对条形杆正下方的底座上,所述控制器固定设置于工作台顶部一侧,所述安装台固定设置于控制器旁侧的工作台中部,所述间歇推送机构设置于一对条形杆的顶部,所述往复摆动机构设置于一对条形杆与工作台之间,且往复摆动机构包括两组摆动组件,所述两组摆动组件对称设置于安装台的两侧。
[0008]
优选的,所述间歇推送机构包括旋转组件和两组平移组件,所述两组平移组件对称设置于旋转组件两侧,所述旋转组件包括支撑板、电机、转轴和凸轮,所述支撑板通过螺栓固定设置于其对应一个条形杆上,所述电机固定设置于支撑板上,所述转轴的一端通过联轴器与电机的输出轴固定连接,所述凸轮与转轴的另一端固定连接,所述凸轮两端呈对称凸起设置。
[0009]
优选的,所述每组平移组件包括滑座、主杆、从杆、复位弹簧和抵块,所述一对条形杆的顶部均设有滑槽,所述滑座的底部对称固定设有一对滑块,所述一对滑块通过滑槽与对应一对条形杆滑动连接。
[0010]
优选的,所述主杆的一端固定设置于滑座一侧,且主杆的另一端呈镂空设置,所述复位弹簧位于主杆内,且复位弹簧的一端焊接于主杆上,所述从杆的一端套设于主杆内,且从杆的一端与复位弹簧的另一端焊接,所述抵块的一侧固定设置于从杆的另一端,且抵块的另一侧与凸轮贴合设置。
[0011]
优选的,所述每组摆动组件包括悬块、摆杆、滑动套板、推板、上滑杆、下滑杆和两组固定杆,所述悬块固定设置于对应滑座底端中部,且悬块一侧底部固定设有第一限位销,所述两组固定杆一端固定设置于对应支撑杆上,所述滑动套板一侧固定设置于两组固定杆的另一端,所述滑动套板另一侧呈竖直状态对称设有第一滑动槽和第二滑动槽。
[0012]
优选的,所述摆杆呈竖直状态转动设置于滑动套板一侧,且摆杆上依次排列设有第一条形槽、第二条形槽和第三条形槽,所述第一限位销设置于第一条形槽内,所述上滑杆滑动设置于对应第一滑动槽内,且上滑杆一侧固定设有第二限位销,所述下滑杆滑动设置于第二滑动槽内,且下滑杆一侧固定设有第三限位销。
[0013]
优选的,所述第二限位销滑动设置于第二条形槽内,所述第三限位销滑动设置于第三限位销内,所述推板与下滑杆延伸至安装台的一端固定连接,所述安装台中部设置有拖链。
[0014]
优选的,所述控制器与电机呈电性连接。
[0015]
本实用新型的有益效果:当拖链在安装台上运行时,操纵控制器打开电机开关,电机的输出轴带动转轴转动,转轴带动凸轮转动,当凸轮的两个对称凸起端抵触至两组平移组件中的抵块时,抵块带动从杆向外移动,从杆在主杆内压缩复位弹簧并带动主杆向外移动,主杆带动对应滑座在一对条形杆上滑动,此时滑座带动悬块向外移动,悬块带动第一限位销在第一条形槽内滑动,从而第一限位销带动摆杆在滑动套板上转动,接着摆杆带动第二限位销和第三限位销分别在第二条形槽和第三条形槽内滑动,从而第二限位销和第三限位销分别带动上滑杆和下滑杆在对应第一滑动槽和第二滑动槽内相对往复滑动,进而两组摆动组件中的下滑杆带动推板对拖链进行限位纠偏,本实用新型通过操纵控制器即可对高速长距离拖链自动进行纠偏,操作方便,安全高效,极大提高了对高速长距离拖链自动纠偏的效率。
附图说明
[0016]
为了更清楚地说明本发明实施例的技术方案,下面对本发明实施例中的附图作简单地介绍。
[0017]
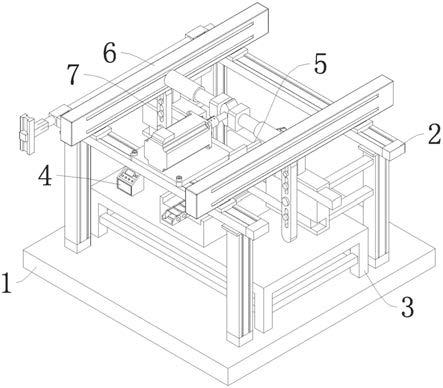
图1为本实用新型的立体结构示意图;
[0018]
图2为本实用新型的主视图;
[0019]
图3为本实用新型的滑座与支撑架立体结构示意图;
[0020]
图4为本实用新型的间歇推送机构与支撑架立体结构示意图;
[0021]
图5为本实用新型的旋转组件拆分示意图;
[0022]
图6为本实用新型的平移组件拆分示意图;
[0023]
图7为本实用新型的摆动组件立体结构示意图;
[0024]
图8为本实用新型的摆动机构局部拆分示意图;
[0025]
图9为本实用新型的拖链立体结构示意图;
[0026]
图10为图8中a处的放大示意图;
[0027]
图中:底座1、支撑架2、支撑杆20、条形杆21、滑槽210、工作台3、控制器4、安装台5、拖链50、间歇推送机构6、旋转组件60、支撑板600、电机601、转轴602、凸轮603、平移组件61、滑座610、滑块6100、主杆611、从杆612、复位弹簧613、抵块614、往复摆动机构7、摆动组件70、悬块700、第一限位销7000、摆杆701、第一条形槽7010、第二条形槽7011、第三条形槽7012、滑动套板702、第一滑动槽7020、第二滑动槽7021、推板703、上滑杆704、第二限位销7040、下滑杆705、第三限位销7050、固定杆706。
具体实施方式
[0028]
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
[0029]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
[0030]
参照图1至图10所示的一种高速长距离拖链自动纠偏设备,包括底座1,还包括支撑架2、工作台3、控制器4、安装台5、间歇推送机构6和往复摆动机构7,所述支撑架2包括四根支撑杆20和一对条形杆21,所述四根支撑杆20呈竖直状态两两对称设置于底座1上,所述一对条形杆21对称设置于四根支撑杆20的顶部,所述工作台3固定设置于一对条形杆21正下方的底座1上,所述控制器4固定设置于工作台3顶部一侧,所述安装台5固定设置于控制器4旁侧的工作台3中部,所述间歇推送机构6设置于一对条形杆21的顶部,所述往复摆动机构7设置于一对条形杆21与工作台3之间,且往复摆动机构7包括两组摆动组件70,所述两组摆动组件70对称设置于安装台5的两侧。
[0031]
所述间歇推送机构6包括旋转组件60和两组平移组件61,所述两组平移组件61对称设置于旋转组件60两侧,所述旋转组件60包括支撑板600、电机601、转轴602和凸轮603,所述支撑板600通过螺栓固定设置于其对应一个条形杆21上,所述电机601固定设置于支撑板600上,所述转轴602的一端通过联轴器与电机601的输出轴固定连接,所述凸轮603与转轴602的另一端固定连接,所述凸轮603两端呈对称凸起设置,支撑板600是为电机601的安装提供载体,当电机601启动后,电机601的输出轴带动转轴602转动,转轴602带动凸轮603转动,当凸轮603的两个对称凸起端抵触至两组平移组件61中的抵块614时,凸轮603带动两侧的抵块614向外平移。
[0032]
所述每组平移组件61包括滑座610、主杆611、从杆612、复位弹簧613和抵块614,所述一对条形杆21的顶部均设有滑槽210,所述滑座610的底部对称固定设有一对滑块6100,所述一对滑块6100通过滑槽210与对应一对条形杆21滑动连接,当主杆611推动滑座610时,滑座610底部的一对滑块6100通过滑槽210在一对条形杆21上滑动,当凸轮603转回时,通过一对复位弹簧613又将两个滑座610复位。
[0033]
所述主杆611的一端固定设置于滑座610一侧,且主杆611的另一端呈镂空设置,所述复位弹簧613位于主杆611内,且复位弹簧613的一端焊接于主杆611上,所述从杆612的一端套设于主杆611内,且从杆612的一端与复位弹簧613的另一端焊接,所述抵块614的一侧固定设置于从杆612的另一端,且抵块614的另一侧与凸轮603贴合设置,当抵块614向外移动时,抵块614带动从杆612向外移动,从杆612在主杆611内压缩复位弹簧613并带动主杆
611向外移动,从而主杆611带动对应滑座610在一对条形杆21上滑动。
[0034]
所述每组摆动组件70包括悬块700、摆杆701、滑动套板702、推板703、上滑杆704、下滑杆705和两组固定杆706,所述悬块700固定设置于对应滑座610底端中部,且悬块700一侧底部固定设有第一限位销7000,所述两组固定杆706一端固定设置于对应支撑杆20上,所述滑动套板702一侧固定设置于两组固定杆706的另一端,所述滑动套板702另一侧呈竖直状态对称设有第一滑动槽7020和第二滑动槽7021,悬块700带动第一限位销7000在第一条形槽7010内滑动,从而第一限位销7000带动摆杆701在滑动套板702上转动,第一滑动槽7020和第二滑动槽7021是对上滑杆704和下滑杆705提供限位滑道,从而保证往复相对移动。
[0035]
所述摆杆701呈竖直状态转动设置于滑动套板702一侧,且摆杆701上依次排列设有第一条形槽7010、第二条形槽7011和第三条形槽7012,所述第一限位销7000设置于第一条形槽7010内,所述上滑杆704滑动设置于对应第一滑动槽7020内,且上滑杆704一侧固定设有第二限位销7040,所述下滑杆705滑动设置于第二滑动槽7021内,且下滑杆705一侧固定设有第三限位销7050,因第二限位销7040与上滑杆704固定连接,第三限位销7050与下滑杆705固定连接,当第二限位销7040和第三限位销7050在对应第二条形槽7011和第三条形槽7012内滑动时,从而上滑杆704和下滑杆705呈往复相对移动,进而下滑杆705推动推板703,推板703对拖链50进行限位。
[0036]
所述第二限位销7040滑动设置于第二条形槽7011内,所述第三限位销7050滑动设置于第三限位销7050内,所述推板703与下滑杆705延伸至安装台5的一端固定连接,所述安装台5中部设置有拖链50,第一限位销7000通过第一条形槽7010带动摆杆701转动时,摆杆701带动第三限位销7050在第三条形槽7012内滑动,从而第三限位销7050带动下滑杆705进行往复式滑动,进而下滑杆705带动推板703往复移动,从而对安装台5上的拖链50进行纠偏。
[0037]
所述控制器4与电机601呈电性连接,电性连接操作简单,方便快捷,提高了对高速长距离拖链50自动纠偏的效率。
[0038]
工作原理:当拖链50在安装台5上运行时,操纵控制器4打开电机601开关,电机601的输出轴带动转轴602转动,转轴602带动凸轮603转动,当凸轮603的两个对称凸起端抵触至两组平移组件61中的抵块614时,抵块614带动从杆612向外移动,从杆612在主杆611内压缩复位弹簧613并带动主杆611向外移动,主杆611带动对应滑座610在一对条形杆21上滑动,此时滑座610带动悬块700向外移动,悬块700带动第一限位销7000在第一条形槽7010内滑动,从而第一限位销7000带动摆杆701在滑动套板702上转动,接着摆杆701带动第二限位销7040和第三限位销7050分别在第二条形槽7011和第三条形槽7012内滑动,从而第二限位销7040和第三限位销7050分别带动上滑杆704和下滑杆705在对应第一滑动槽7020和第二滑动槽7021内相对往复滑动,进而两组摆动组件70中的下滑杆705带动推板703对拖链50进行限位纠偏。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1