一种高温铸件机器人自动化夹持装置的制作方法
1.本实用新型涉及工装夹具技术领域,具体为一种高温铸件机器人自动化夹持装置。
背景技术:
2.现有技术中的集装箱支撑脚铸件,通过浇筑成型后温度高达500摄氏度,且重量达到80kg以上,成型后需静置较长时间待其完全冷却至常温后,再通过人工吊装的方式对其进行搬运以进行下一道工序,不仅需花费较多的等待时间,且操作非常不便,故此问题亟待解决。
3.专利号cn202020602282.3中公开了一种高温铸件机器人自动化夹持装置,包括上下两端分别连接有支撑架和万向轮的移动底座,支撑架下端中心处固定连接有第一电动推杆,第一电动推杆的动力输出端通过转向调节机构连接有调节龙门,转向调节机构包括固定板、电动机、从动齿轮和主动齿轮,调节龙门下端连接有第二电动推杆,第二电动推杆的输出端固定连接有安装板,安装板远离第二电动推杆的端面连接有夹紧头部,移动底座上端滑动连接有防护机构。本实用新型通过设置的第一电动推杆、调节龙门、第二电动推杆和夹紧头部,利用第二电动推杆驱动一对夹紧头部上的夹紧盒对零件本体铸件进行夹紧,自动化程度高,夹取更加稳定,且大大节省了劳动力,安全性能好。
4.上述夹持装置在使用时,由于龙门设置在夹持机构外部,对夹持机构外存在遮挡作用,在对铸件进行夹持时,无法对不同位置的铸件进行夹取。
技术实现要素:
5.本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
6.鉴于上述和/或现有高温铸件机器人自动化夹持装置中存在的问题,提出了本实用新型。
7.因此,本实用新型的目的是提供一种高温铸件机器人自动化夹持装置,能够调节夹持机构的工作位置,使装置能够对不同位置的铸件进行抓取,并方便在抓取后对铸件进行运输。
8.为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
9.一种高温铸件机器人自动化夹持装置,其包括:
10.底座;
11.支撑机构,设置在所述底座顶部左侧,所述支撑机构包括电动转盘、支撑液压缸、横梁、配重框和配重块,所述电动转盘设置在底座顶部左侧,所述电动转盘顶部设置支撑液
压缸,所述支撑液压缸顶部设置横梁,所述横梁右端设置配重框,所述配重框内设置配重块;
12.夹持调向机构,设置在所述横梁左端,所述夹持调向机构包括电机、轴杆和支架,所述电机设置在横梁左端顶部,所述轴杆位于横梁左端底部并与电机连接,所述轴杆底部连接支架;
13.夹持机构,设置在所述支架上。
14.作为本实用新型所述的一种高温铸件机器人自动化夹持装置的一种优选方案,其中:所述底座包括基板、滚轮和垫板,所述基板底部设置均匀分布的滚轮,所述基板顶部右侧设置垫板。
15.作为本实用新型所述的一种高温铸件机器人自动化夹持装置的一种优选方案,其中:所述夹持机构包括夹持液压缸和夹持块,所述夹持液压缸设置在支架两侧,所述夹持液压缸输出端设置夹持块。
16.作为本实用新型所述的一种高温铸件机器人自动化夹持装置的一种优选方案,其中:所述电动转盘与支撑液压缸之间设置有均匀分布的支撑肋版。
17.作为本实用新型所述的一种高温铸件机器人自动化夹持装置的一种优选方案,其中:所述垫板内部设置有水冷盘管,所述水冷盘管与外部水冷装置连接。
18.与现有技术相比:本实用新型的支撑机构能够在电动转盘的带动下进行转向调节夹持机构的工作位置,使装置能够对不同位置的铸件进行抓取,并方便在抓取后对铸件进行运输,提高装置适用范围。
附图说明
19.为了更清楚地说明本实用新型实施方式的技术方案,下面将结合附图和详细实施方式对本实用新型进行详细说明,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
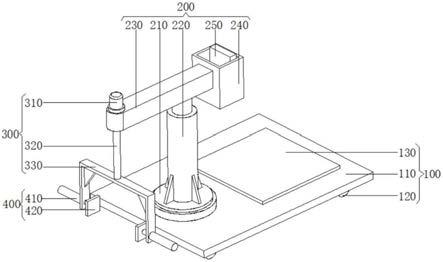
20.图1为本实用新型轴侧结构示意图;
21.图2为本实用新型侧视结构示意图。
22.图中:100底座、110基板、120滚轮、130垫板、200支撑机构、210电动转盘、220支撑液压缸、230横梁、240配重框、250配重块、300夹持调向机构、310电机、320轴杆、330支架、400夹持机构、410夹持液压缸、420夹持块。
具体实施方式
23.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
24.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施方式的限制。
25.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其
在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
26.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
27.本实用新型提供一种高温铸件机器人自动化夹持装置,能够调节夹持机构的工作位置,使装置能够对不同位置的铸件进行抓取,并方便在抓取后对铸件进行运输,提高装置适用范围,请参阅图1-图2,包括:底座100、支撑机构200、夹持调向机构300和夹持机构400。
28.底座100包括基板110、滚轮120和垫板130,基板110底部设置均匀分布的滚轮120,基板110顶部右侧设置垫板130,滚轮120带动底座100移动,垫板130用于支撑铸件。
29.支撑机构200,设置在底座100顶部左侧,支撑机构200包括电动转盘210、支撑液压缸220、横梁230、配重框240和配重块250,电动转盘210设置在底座100顶部左侧,电动转盘210顶部设置支撑液压缸220,支撑液压缸220顶部设置横梁230,横梁230右端设置配重框240,配重框240内设置配重块250,电动转盘210带动支撑液压缸220转动,调节横梁230末端夹持机构400的位置,支撑液压缸220对横梁230进行支撑高度调节,配重框240和配重块250用于平衡夹持机构400的夹持重量,保持横梁230结构稳定。
30.夹持调向机构300,设置在横梁230左端,夹持调向机构300包括电机310、轴杆320和支架330,电机310设置在横梁230左端顶部,轴杆320位于横梁230左端底部并与电机310连接,轴杆320底部连接支架330,电机310带动轴杆320转动,调节支架330转向,使夹持机构400能够进行不同角度的夹取。
31.夹持机构400,设置在支架330上,夹持机构400包括夹持液压缸410和夹持块420,夹持液压缸410设置在支架330两侧,夹持液压缸410输出端设置夹持块420,夹持液压缸410伸出,夹持块420相互靠近,对铸件进行夹持。
32.电动转盘210与支撑液压缸220之间设置有均匀分布的支撑肋版,提高结构稳定性。
33.垫板130内部设置有水冷盘管,水冷盘管与外部水冷装置连接,对高温铸件进行水冷散热,避免风冷散热将空气中灰尘吹到铸件外部。
34.在具体的使用时,电动转盘210带动支撑液压缸220转动,调节横梁230末端夹持机构400的位置,支撑液压缸220对横梁230进行支撑高度调节,电机310带动轴杆320转动,调节支架330转向,使夹持机构400能够进行不同角度的夹取,夹持液压缸410伸出,夹持块420相互靠近,对铸件进行夹持,夹持后,电动转盘210带动支撑液压缸220转动,将铸件移至底座100上方,利用底座100对铸件进行运输。
35.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1