链传动多边形效应的补偿方法、控制装置及乘客输送设备与流程
本发明属于电梯,尤其涉及一种链传动多边形效应的补偿方法、控制装置及乘客输送设备。
背景技术:
1、驱动链传动和梯级链传动均属于链传动,是具有中间挠性件的啮合传动。一般在链条与链轮啮合的过程中,整根链条是可以曲折的挠性体,每一链节则为刚性体。链轮(包括驱动链和梯级链)可看作正多边形,因而链传动的运动情况和绕在多边形轮子上的带传动很相似。而且在啮合的过程中,链条中心线(中心线指链条拉直时,铰链中心的连线)位置存在着周期性的变化。链的多边形效应使得链条在传荷载过程中容易振动,磨损加剧,进一步使得梯级速度不均匀,严重影响乘客输送装置的乘坐感受。
2、中国专利申请文献cn108439167a《乘客输送装置及其电气驱动装置相位角的确定方法》公开了一种确定最优初始相位角的方法,即t0时刻的相位角β(t0)为:将作p等分,p为大于5的整数,每次测试时,设定β(t0)为其中一角度,使电气驱动装置变频驱动所述梯级链轮转动,利用振动仪对运行过程中的梯级链或梯级的振动进行检测,p次测试完成后,确定振动最小的一次测试对应的角度作为β(t0)。该专利文献还公开了,通过一电流检测模块检测所述电气驱动装置工作电流并对其进行数学分析,获取电流数据中多边形效应对应频率的幅值并发送到电气驱动装置。其存在的缺陷在于:在振动检测时,该装置依赖于外部加装的振动传感器或测试仪;没有提出一种对电流数据进行数学分析的具体的方法,且没有公开多边形效应对应频率的计算方法,其计算存在误差较大,且计算较复杂,计算速度慢等缺点。
3、中国专利申请文献cn1407946a《减小运行传送系统回动区域内多边形效应的方法和装置》公开了一套用于减小多边形效应的驱动装置,但其方法至少涉及两个传感器,包括一个用于检测回动轮相位的传感器、一个用于检测链条转动速度的传感器。其存在的缺陷在于:需要加装额外的两个传感器。
4、因此,如何在尽可能不增加使用和校准比较复杂的振动、相位传感器的前提下,能够对链传动的多边形效应进行补偿;并且,如何在补偿运算的过程中更加准确、快速进行数据处理的技术问题。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,该简化形式的概念均为本领域现有技术简化,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、本发明需要解决的技术问题在于:在减少使用振动传感器、相位传感器、链条转动速度传感器等机械量测量的传感器的条件下,能够对链传动的多边形效应进行补偿的测控;并且,如何在测控的数学分析的过程中提高运算的精准度和运算速度。
3、为了解决上述技术问题,本发明提供了一种链传动多边形效应的补偿方法、控制装置及乘客输送设备,其目的在于,提供一种更加便捷的多边形效应补偿的测控方法,并在测控的数学分析过程中提高运算的精准度和运算速度。
4、为了达到上述目的,本发明提供一种链传动多边形效应的补偿方法,链传动的驱动链轮由电机驱动,包括:
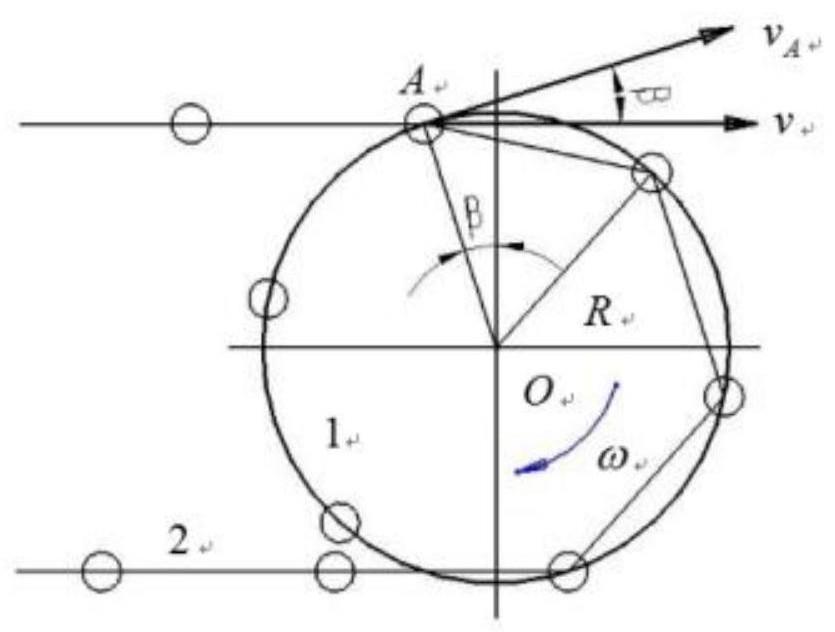
5、驱动链轮的齿数为z,驱动链轮以匀角速度ω转动;
6、相位角β的取值范围是
7、采用枚举法,在中选取一初始相位角β(t0);将相位角的取值范围p等分,初始相位角加迭代形成新的初始相位角若新的初始相位角大于则减去形成新的初始相位角;由此,形成p个初始相位角;
8、以p个初始相位角对链传动的多边形效应进行补偿,并在每次补偿时采样电机的实时电流数值,并对该电流数值进行频谱分析,对固有多边形效应频率对应的幅值进行提取并比较,采用p个初始相位角中对应幅值最小的那个初始相位角作为多边形补偿的初始相位角;
9、固有多边形效应频率为
10、优选地,对电流数值的频谱分析采用小波分析。
11、优选地,所述小波分析方法步骤如下:
12、对电流数值的采样频率为fs,分析点数n,获得电流数值的时域离散化表示;
13、将频率归一化至区间[0,π],对电流数值的时域离散化表示进行快速傅里叶变换,得到电流信号的频谱f(ω),ω∈[0,π];
14、以固有多边形效应的频率为幅值极大值点,确定频带边界,确定分割区间;
15、在固有多边形相应的频率所在的分割区间内进行小波构造,定义经验尺度函数和经验小波函数,得到滤波器组;
16、电流信号通过滤波器组中的滤波器进行经验小波变换的滤波,分解得到的固有多边形相应的频率的分量模态成分。
17、优选地,经验尺度函数和经验小波函数分别定义如下:
18、其他,
19、
20、式中,β(x)满足:
21、
22、且有,
23、相邻频带边界之间存在滤波器过渡带宽τn=γωn,
24、γ取值满足:
25、
26、定义近似系数和细节系数如下:
27、
28、
29、式中:为φ1(t)的傅里叶变换,为ψn(t)的傅里叶变换;为φ1(t)的复共轭,为ψn(t)的复共轭;
30、信号f(t)的重构表达式为:
31、
32、信号f(t)通过经验小波变换分解得到的分量模态成分fj(t)为:
33、
34、
35、优选地,选取函数p(x)=x4(35-84x+70x2-20x3),0<x<1;
36、选取γ=0.12;
37、采样频率设置为2.5khz、分析点数n=1024,则频率分辨率t=2.44hz;
38、角频率进行归一化:
39、频率f1=2.44hz,频带边界第一角频率ω1=0.0061,
40、频率f2=4.88hz,频带边界第一角频率ω2=0.0123;
41、固有多边形相应的频率位于f1和f2之间。
42、为了达到上述目的,本发明还提供一种控制装置,该控制装置采用所述链传动多边形效应的补偿方法,包括:
43、信号采集模块,所述信号采集模块包括电机电流采样单元用以采样电机的实时电流数值;
44、信号处理模块,所述信号处理模块用以对电流数值进行频谱分析;
45、控制模块,所述控制模块用以进行有限枚举法、等间距迭代法计算出的电流数值的频谱中固有多边形效应频率对应幅值的大小比较,筛选出对应幅值最小的,并向执行模块发出用以补偿的初始相位角;
46、执行模块,所述执行模块用以接受初始相位角信号并执行。
47、优选地,所述信号处理模块包括小波滤波器单元用以对电流数值进行小波分析。
48、为了达到上述目的,本发明又提供了一种乘客输送设备,所述乘客输送设备采用所述链传动多边形效应的补偿方法,包括:控制装置用以运行补偿方法;所述控制装置包括:
49、信号采集模块,所述信号采集模块包括电机电流采样单元用以采样电机的实时电流数值;
50、信号处理模块,所述信号处理模块用以对电流数值进行频谱分析;
51、控制模块,所述控制模块用以进行有限枚举法、等间距迭代法计算出的电流数值的频谱中固有多边形效应频率对应幅值的大小比较,筛选出对应幅值最小的,并向执行模块发出用以补偿的初始相位角;
52、执行模块,所述执行模块用以接受初始相位角信号并执行。
53、优选地,所述信号处理模块包括小波滤波器单元用以对电流数值进行小波分析。
54、优选地,乘客输送设备的线速度为v0,驱动链轮的半径为r,
55、固有多边形效应频率为
56、与现有技术相比,本发明提供的链传动多边形效应的补偿方法,通过明确固有多边形效应频率,在此频率的基础上对采样获得的通过枚举、迭代的初始相位角下电机电流数值进行数学分析。而电机电流数值的采样不需要额外的机械量的传感器,采样简单易行;由于频率的明确,所以,使得对电流数值的频谱分析更加精准和快速。基于所述链传动多边形效应的补偿方法,本发明还提供了相应的控制装置和乘客输送设备,主要包括执行相关补偿方法的信号处理模块、控制模块、执行模块。
- 还没有人留言评论。精彩留言会获得点赞!