一种对辊式温控自动挤胶装置及挤胶方法与流程
1.本发明涉及光伏发电技术领域,尤其涉及一种对辊式温控自动挤胶装置及挤胶方法。
背景技术:
2.随着光伏发电技术快速发展,光伏电站装机成本持续下降,发电性价比大幅提升,光伏发电已成为成本最低的发电方式之一。
3.硅胶由于吸附性能好、化学性质稳定、不燃烧等特点广泛应用于光伏组件生产中,在组件生产过程中,硅胶通过灌胶机打入组件边框和接线盒内,用来起粘合作用,由于灌胶机的工作特点,每袋硅胶底部都会残余10kg左右的硅胶,因此每次需要人工清理,由于硅胶粘性大,每次清理费时费力而且还不能清理干净。
技术实现要素:
4.本发明提供一种对辊式温控自动挤胶装置,装置可根据温度不同自动调节电机转速,使挤胶速度和残余量上明显得到改善。
5.对辊式温控自动挤胶装置包括:机架,机架设有固定底座,固定底座上连接有第一可活动支架和第二可活动支架;第一可活动支架上安装有电机和控制电机运行的控制箱;
6.固定底座的上部设有动力轴;动力轴第一端穿过第一可活动支架的顶端与电机连接;动力轴第二端与第二可活动支架顶端连接;动力轴铰接有用于固定硅胶袋的固定杆;固定杆与动力轴之间设有用于将动力轴与固定杆进行锁紧的第一锁紧组件;
7.动力轴的下部设有第一挤胶轴和第二挤胶轴;
8.第一挤胶轴的第一端与第一可活动支架固定连接;第一挤胶轴的第二端与第二可活动支架固定连接;
9.第二挤胶轴的第一端与第一可活动支架铰接,且第二挤胶轴的第一端靠近第一挤胶轴的第一端设置;
10.第二可活动支架上设有用于锁紧第二挤胶轴第二端的第二锁紧组件,第一挤胶轴和第二挤胶轴设置在一个水平面上,用于对硅胶袋进行夹持。
11.进一步需要说明的是,第一锁紧组件固设到动力轴上;第一锁紧组件包括:两个固定螺帽、可活动螺栓以及环形垫片;
12.固定杆的第一端与动力轴之间设置有铰接端;
13.可活动螺栓固定安装到动力轴,两个固定螺帽连接到可活动螺栓上,环形垫片设在两个固定螺帽之间;固定杆的第二端与可活动螺栓相抵接;所述固定杆为中空结构,固定杆的活动端设有开口,拔出活动螺栓使固定杆在垂直面逆时针转动,最大转动角度为120
°
;转动固定杆,将硅胶袋顶部固定到固定杆上,放下固定杆,将活动螺栓插入到固定杆的中空结构内部。
14.进一步需要说明的是,第二锁紧组件设有卡座、固定螺母和活动螺栓;
15.卡座固设在第二可活动支架上,第二挤胶轴卡接到卡座内部,并通过固定螺母和活动螺栓配合,锁紧到卡座上;
16.第二挤胶轴与第一挤胶轴处于同一水平位置,第二挤胶轴与第一挤胶轴之间设置有空隙;第二挤胶轴上设有带轴滚轮。
17.进一步需要说明的是,固定底座上还连接有第一升降支撑杆和第二升降支撑杆;
18.第一升降支撑杆第一端连接到第一可活动支架的中部位置;第一升降支撑杆第二端与固定底座连接;
19.第二升降支撑杆第一端连接到第二可活动支架的中部位置;第二升降支撑杆第二端与固定底座连接;
20.第一升降支撑杆和第二升降支撑杆分别设有支撑固定管和支撑伸缩管,支撑伸缩管插接到支撑固定管内部,并通过支撑销轴连接;
21.第一可活动支架和第二可活动支架分别设有活动固定管和活动伸缩管,活动伸缩管插接到活动固定管内部,并通过活动销轴连接;固定底座的底部设有四个万向轮。
22.进一步需要说明的是,所述控制箱包括:电源模块、控制模块、驱动模块、温控模块以及控制面板;
23.所述电源模块为控制箱内部电气元件供电,电源模块设有交直转换电路和变压电路,交直转换电路和变压电路将220v电转换为控制模块所用的直流电;
24.第一挤胶轴内部装有电热丝和温度传感器m1;第二挤胶轴内部装有温度传感器m2;
25.红外感应模块安装到第一可活动支架的凹槽内,与第一挤胶轴下边缘齐平,水平方向发射红线线,当红外线被遮挡时,说明硅胶袋尚未向上旋转至第一挤胶轴下边缘齐平位置;当红外线未被遮挡时,则判定为挤胶未完成;
26.控制模块分别与温度传感器m1、温度传感器m2、红外感应模块、驱动模块、温控模块以及控制面板采用总线连接;控制模块内置双模式控制主程序,接收温度传感器m1和温度传感器m2感应的温度信息,红外感应模块感应的红外信息以及用户通过控制面板输入的控制指令,并通过驱动模块控制电机运行,以及通过温控模块控制电热丝。
27.进一步需要说明的是,所述控制面板包括拨动开关、紧急制动、方向键、显示屏、调速、挤胶、退料、报警器;
28.本发明还提供一种对辊式温控自动挤胶方法,方法包括:
29.步骤c1:控制箱接通电源,系统上电;
30.步骤c2:控制模块自动完成初始化;
31.步骤c3:操作拨动开关进行模式选择,拨动开关打到左侧为手动模式,跳转至步骤c4;打到中间为停止状态,跳转至步骤c5;打到右侧为手动模式,跳转至步骤c6;
32.步骤c4:进入手动控制模式,调用手动控制子程序l,完成处理后程序跳转至步骤c7;
33.步骤c5:进入复位模式,控制箱停止工作,程序调转至步骤c7;
34.步骤c6:进入自动控制模式,调用温度控制子程序rs和电机控制子程序rm,温度控制和电机控制并行处理,处理完成后程序跳转至步骤c7;
35.步骤c7:程序结束。
36.进一步需要说明的是,手动控制子程序l包括转速控制、挤胶控制、退料控制3个程序段;
37.步骤l1:调用手动控制子程序l,程序开始;
38.步骤l2:根据实际需要对控制箱的挤胶按钮、退料按钮、转速调节旋钮、紧急制动按钮进行操作;
39.步骤l3:当按下挤胶按钮时,触发电机正转信号;
40.当按下退料按钮时,触发电机反转信号,挤胶按钮与退料按钮互锁,即同一时刻只有一个按钮有效;
41.当转动调速旋钮时,触发电机转速信号;
42.当按下紧急制动按钮时,触发电机停转信号,程序跳转至步骤l6;
43.步骤l4:信号触发后,正转/反转、转速、紧急制动以电信号的形式传输至驱动模块,电机按照驱动信号进行转动,然后进入步骤l5进行条件判断;
44.步骤l5:当电机驱动信号正常时,程序跳转至步骤l4;
45.当电机驱动信号不正常时,程序跳转至步骤l6;
46.所述驱动信号正常,指的是电机的电压、电流、转速参数满足公示u是电枢电压,l为线圈的电感量,i是电枢电流,r是电枢回路的电阻,是励磁磁通,k是感应电动势常数,di/dt是电流的变化率;
47.步骤l6:电机停转;
48.步骤l7:程序结束。
49.进一步需要说明的是,温度控制子程序rs包括如下步骤:
50.步骤rs1:调用温度控制子程序rs,程序开始;
51.步骤rs2:参数设定,具体方法是通过操作控制箱显示屏的“上”“下”“左”“右”“ok”按键,设定电热丝目标温度t
t
、目标温度误差α、温度报警上限ts、上限温度误差β;t1、t2温度差δ;
52.当按下紧急制动按钮时,触发电机停转信号,程序跳转至步骤rs8;
53.步骤rs3:温度传感器m1采集第一挤胶轴实时温度t1;
54.温度传感器m2采集第二挤胶轴实时温度t2,根据公式计算实时温度均值t,然后进入步骤rs4进行条件判断;
55.步骤rs4:当t≤t
t-α和|t1-t2|≤δ条件同时满足时,跳转至步骤rs5;
56.当t≤t
t-α或|t1-t2|≤δ条件不能同时满足时,跳转至步骤rs7进行条件判断;
57.步骤rs5:控制模块控制电热丝通电开始加热升温,采用模糊pid算法自动调节pid参数,温度传感器m1和温度传感器m2继续采集两挤胶轴实时温度t1、t2,根据公式计算温度实时均值t,然后进入步骤rs6进行条件判断;
58.步骤rs6:当t≤t
t-α和|t1-t2|≤δ条件同时满足时,跳转至步骤rs5;
59.当t≤t
t-α或|t1-t2|≤δ条件不能同时满足时,跳转至步骤rs7进行条件判断;
60.步骤rs7:当t≥t
s-β条件满足时,进入步骤rs8;
61.当t≥t
s-β条件不时,程序跳转至步骤rs9;
62.步骤rs8:电热丝断电,程序结束;
63.步骤rs9:电热丝断电并触发报警器,程序结束。
64.进一步需要说明的是,电机挤胶方法包括:转速控制、挤胶控制、退料控制;
65.步骤rm1:调用电机控制子程序rm,程序开始;
66.步骤rm2:通过控制面板显示屏的“上”“下”“左”“右”“ok”按键,设定电热丝目标温度t
t
、目标温度误差α、温度报警上限ts,其中t
t
《ts,ts不高于60摄氏度,上限温度误差β;
67.当按下紧急制动按钮时,触发电机停转信号,跳转至步骤rm11;
68.步骤rm3:温度传感器m2采集第二挤胶轴实时温度t2,根据公式计算实时温度均值t,然后进入步骤rm4进行条件判断;
69.控制器触发正转信号,然后程序跳转至步骤rm5;
70.步骤rm4:当t≤t
t-α和|t1-t2|≤δ条件同时满足时,根据函数n=0.02t+1.2,计算电机转速n,并触发转速信号传输至驱动模块;
71.步骤rm5:驱动模块接收转速信号和正转信号后,驱动电机以转速n正转,进入挤胶状态,同时记录电机正转圈数p,然后跳转至步骤rm6进行条件判断;
72.rm6:当电机驱动信号正常时,跳转至步骤rm7进行条件判断;
73.电机驱动信号不正常时,程序跳转至步骤rm11;
74.驱动信号正常为电机的电压、电流、转速参数满足公示u是电枢电压,l为线圈的电感量,i是电枢电流,r是电枢回路的电阻,是励磁磁通,k是感应电动势常数,di/dt是电流的变化率;
75.步骤rm7:当红外感应模块检测到遮挡信号时,跳转至步骤rm3;当红外感应模块检测不到遮挡信号时,触发反转信号,进入下一步;
76.步骤rm8:步骤rm4中程序会实时计算电机转速,并触发转速信号,驱动模块接收转速信号和反转信号后,驱动电机以转速n反转,进入退料状态,同时记录电机正转圈数q,然后程序进入步骤rm9进行条件判断;
77.步骤rm9:当电机驱动信号正常时,程序跳转至步骤rm10进行条件判断;电机驱动信号不正常时,程序跳转至步骤rm11;
78.所述驱动信号正常为电机的电压、电流、转速参数满足公示u是电枢电压,l为线圈的电感量,i是电枢电流,r是电枢回路的电阻,是励磁磁通,k是感应电动势常数,di/dt是电流的变化率;
79.步骤rm10:当p=q条件满足时,程序跳转至步骤rm11;
80.当p=q条件不满足时,控制器继续触发反转信号,程序进入步骤rm8;
81.步骤rm11:电机停转;
82.步骤rm12:电机控制完成,程序结束。
83.从以上技术方案可以看出,本发明具有以下优点:
84.本发明提供的对辊式温控自动挤胶装置将硅胶袋顶部固定到固定底座的上部,可以固定在动力轴和固定杆上,能够挤出硅胶袋中的残余硅胶,减少原料浪费,节约生产成本。
85.本发明利用第一挤胶轴和第二挤胶轴夹住硅胶袋,用刀片将硅胶袋底部划开,当动力轴旋转时,在硅胶袋的带动下第一挤胶轴和第二挤胶轴同时向上旋转,从而使袋中残余硅胶从底部开口中流出。
86.本发明提供的对辊式温控自动挤胶方法具有两种运行模式,一种是手动挤胶模式,另一种是自动挤胶模式,两种模式的切换和运行通过控制箱内置的双模式控制主程序c完成。所述双模式控制主程序c主要包括手动控制子程序l和自动控制子程序r,进一步的,所述的手动控制子程序l需根据实际情况操作控制箱上的按键进而控制装置的挤胶正转、退料反转;所述自动控制子程序r主要包括温度控制子程序rs和电机控制子程序rm,所述自动控制程序r可根据当前温度自动调节电机转速,转速与温度的关系为n=0.02t+1.2根据工程经验获得,用户在完成控制箱参数设定后,装置可自动完成挤胶正转、退料反转全过程。这样,实现了挤胶可以实现手动、自动两种挤胶模式,其中自动挤胶模式将温度融合进了控制程序中,能够根据环境变化,自动控制装置温度,使装置处于最佳挤胶状态,能够方便、快捷的挤出硅胶袋中的残余硅胶。
87.本发明的装置一方面有效减少了硅胶浪费,另一方面节约了时间、人力成本,对降低企业生产成本,增加企业营收具有积极意义。此外本装置不仅可应用于光伏生产企业,对于与硅胶有相似性质的材料均可使用,因此可进行大力推广。
附图说明
88.为了更清楚地说明本发明的技术方案,下面将对描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
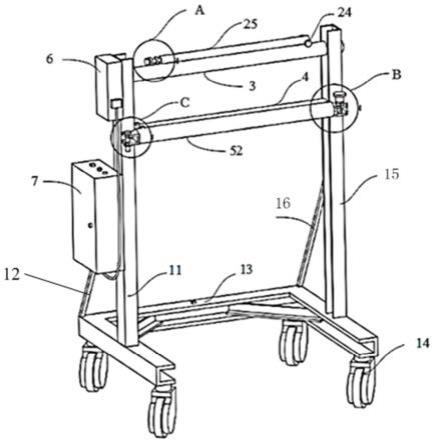
89.图1为对辊式温控自动挤胶装置示意图;
90.图2为对辊式温控自动挤胶装置实施例示意图;
91.图3为图1中a处放大图;
92.图4为图1中b处放大图;
93.图5为图1中c处放大图;
94.图6为控制箱实施例示意图;
95.图7为双模式控制主程序c控制流程图;
96.图8为手动控制子程序l控制流程图;
97.图9为温度控制子程序rs控制流程图;
98.图10为电机控制子程序rm控制流程图。
具体实施方式
99.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
100.本发明提供一种对辊式温控自动挤胶装置,如图1至6所示,包括:机架(1),机架(1)设有固定底座(13),固定底座(13)上连接有第一可活动支架(11)和第二可活动支架
(15);第一可活动支架(11)上安装有电机(6)和控制电机(6)运行的控制箱(7);
101.固定底座(13)的上部设有动力轴(3);动力轴(3)第一端穿过第一可活动支架(11)的顶端与电机(6)连接;动力轴(3)第二端与第二可活动支架(15)顶端连接;动力轴(3)铰接有用于固定硅胶袋的固定杆(25);固定杆(25)与动力轴(3)之间设有用于将动力轴(3)与固定杆(25)进行锁紧的第一锁紧组件;
102.装置的电机6为直流电机,输入端与控制箱7相连,控制电机启停、转速、正/反转等动作,正转表示挤胶、反转表示退料。输出端与动力轴3相连,电机启动后带动动力轴旋转。
103.动力轴(3)的下部设有第一挤胶轴(4)和第二挤胶轴(5);
104.第一挤胶轴(4)的第一端与第一可活动支架(11)固定连接;第一挤胶轴(4)的第二端与第二可活动支架(15)固定连接;
105.第二挤胶轴(5)的第一端与第一可活动支架(11)铰接,且第二挤胶轴(5)的第一端靠近第一挤胶轴(4)的第一端设置;
106.第二可活动支架(15)上设有用于锁紧第二挤胶轴(5)第二端的第二锁紧组件,第一挤胶轴(4)和第二挤胶轴(5)设置在一个水平面上,用于对硅胶袋进行夹持。
107.第一挤胶轴4与第二挤胶轴5的铰接方式如图5所示,铰接位置具有铰接轴19。其中,第一挤胶轴4为一种带轴滚轮,通过轴安装于可活动支架11的中上部,可原位置旋转,内部装有电热丝,内部安有温度传感器m1,电热丝18和温度传感器m1与控制箱7相连。
108.本发明提供的实施例中,第一锁紧组件固设到动力轴(3)上;第一锁紧组件包括:两个固定螺帽(21)、可活动螺栓(22)以及环形垫片(23);固定杆(25)的第一端与动力轴(3)之间设置有铰接端(24);可活动螺栓(22)固定安装到动力轴(3),两个固定螺帽(21)连接到可活动螺栓(22)上,环形垫片(23)设在两个固定螺帽(21)之间;固定杆(25)的第二端与可活动螺栓(22)相抵接;
109.所述固定杆(25)为中空结构,固定杆(25)的活动端设有开口,拔出活动螺栓(22)使固定杆(25)在垂直面逆时针转动,最大转动角度为120
°
;转动固定杆(25),将硅胶袋顶部固定到固定杆(25)上,放下固定杆(25),将活动螺栓(22)插入到固定杆(25)的中空结构内部。
110.可以理解的是,拔出活动螺栓(22)使固定杆(25)在垂直面逆时针转动,使固定杆(25)与动力轴(3)相互分离,如果需要固定硅胶袋,则将固定杆(25)与动力轴(3)相互贴合,将硅胶袋进行固定。
111.本发明提供的实施例中,第二锁紧组件设有卡座531、固定螺母532和活动螺栓533;卡座531固设在第二可活动支架15上,第二挤胶轴5卡接到卡座531内部,并通过固定螺母532和活动螺栓533配合,锁紧到卡座531上;第二挤胶轴5与第一挤胶轴4处于同一水平位置,第二挤胶轴5与第一挤胶轴4之间设置有空隙;第二挤胶轴5上设有带轴滚轮52。
112.使用方法是提起活动螺栓533,将第二挤胶轴5放到卡座531上,然后放下活动螺栓533,即可将第二挤胶轴5固定到卡座531上。更进一步的,所述卡座531由两片上下平行放置的钢板组成,上侧钢板略长下侧钢板,两片钢板水平焊接于第二可活动支架15前侧;所述固定螺母532焊接于卡座531上侧;所述活动螺栓533可插入卡座531之内。
113.本发明提供的实施例中,固定底座13上还连接有第一升降支撑杆12和第二升降支撑杆16;第一升降支撑杆12第一端连接到第一可活动支架11的中部位置;第一升降支撑杆
12第二端与固定底座13连接;第二升降支撑杆16第一端连接到第二可活动支架15的中部位置;第二升降支撑杆16第二端与固定底座13连接;第一升降支撑杆12和第二升降支撑杆16分别设有支撑固定管和支撑伸缩管,支撑伸缩管插接到支撑固定管内部,并通过支撑销轴连接;第一可活动支架11和第二可活动支架15分别设有活动固定管和活动伸缩管,活动伸缩管插接到活动固定管内部,并通过活动销轴连接;固定底座13的底部设有四个万向轮。这样装置可以实现高度的调节,还可以通过四个万向轮移动位置。固定底座13分别与第一可活动支架11和第二可活动支架15相互垂直,采用的是刚链接;固定底座13分别与第一升降支撑杆12和第二升降支撑杆16采用的是铰连接,连接角度可调。
114.本发明提供的实施例中,可活动螺栓22插入到两个固定螺帽21中;环形垫片23套在可活动螺栓22上,位于2个固定螺帽21之间,保证可活动螺栓22无法脱落;铰接端24能够实现固定杆25垂直方向的转动;固定杆25中空,左侧有开口,拔出活动螺栓22可使固定杆25在垂直面逆时针转动,转动角度120
°
。装置使用时拔出活动螺栓22,抬起固定杆25,将硅胶袋顶部固定到固定杆25上,然后放下固定杆25,将活动螺栓22重新插入到固定杆25的左侧开口处。
115.本发明中,装置能够挤出硅胶袋中的残余硅胶,减少原料浪费,节约生产成本,其使用方法是,将硅胶袋顶部固定到固定底座13的上部,可以固定在动力轴3和固定杆25上。然后用第一挤胶轴4和第二挤胶轴5夹住硅胶袋,用刀片将硅胶袋底部划开,当动力轴3旋转时,在硅胶袋的带动下第一挤胶轴4和第二挤胶轴5同时向上旋转,从而使袋中残余硅胶从底部开口中流出。
116.作为本发明的一种实施方式,控制箱7包括:电源模块71、控制模块72、驱动模块75、温控模块76以及控制面板77;
117.所述电源模块71为控制箱7内部电气元件供电,电源模块71设有交直转换电路和变压电路,交直转换电路和变压电路将220v电转换为控制模块72所用的直流电;第一挤胶轴4内部装有电热丝和温度传感器m1;第二挤胶轴5内部装有温度传感器m2;
118.红外感应模块74安装到第一可活动支架11的凹槽内,与第一挤胶轴4下边缘齐平,水平方向发射红线线,当红外线被遮挡时,说明硅胶袋尚未向上旋转至第一挤胶轴4下边缘齐平位置;当红外线未被遮挡时,则判定为挤胶未完成;控制模块72分别与温度传感器m1、温度传感器m2、红外感应模块74、驱动模块75、温控模块76以及控制面板77采用总线连接;控制模块72内置双模式控制主程序,接收温度传感器m1和温度传感器m2感应的温度信息,红外感应模块74感应的红外信息以及用户通过控制面板77输入的控制指令,并通过驱动模块75控制电机6运行,以及通过温控模块76控制电热丝。
119.控制面板77包括拨动开关771、紧急制动772、方向键773、显示屏774、调速775、挤胶776、退料777、报警器778。更进一步的,所述拨动开关771有3档,打到左侧为手动模式,打到中间为停止状态,打到右侧为自动模式;所述紧急制动772为按钮样式,该按钮为整个控制箱的1级响应按钮,其响应的优先程度最高,按下后整个装置停止工作;所述方向键773可进行参数调整,通过操作控制箱显示屏的“上”“下”“左”“右”“ok”按键进行参数调整,所调参数显示在显示屏774上;所述显示屏774分为参数调整、转速显示、温度显示等3大功能区,参数调整结合方向键773使用,转速显示对电机的转速进行实时显示,温度显示对第一挤胶轴4实时温度t1和第二挤胶轴5实时温度t2;所述调速775为旋钮样式,在手动模式时有效,
通过转动调速775旋钮控制电机转速;所述挤胶776为按钮样式,与退料777按钮互锁即两个按钮同一时刻只有一个有效,在手动模式时有效,按下后控制电机正转;所述退料777为按钮样式,与挤胶776按钮互锁即两个按钮同一时刻只有一个有效,在手动模式时有效,按下后控制电机反转;所述报警器778为可闪烁红光的蜂鸣器,当控制模块72判断装置出现异常时发光鸣叫。
120.控制模块72包括但不限于微处理器、专用集成电路(application specific integrated circuit,asic)、可编程门阵列(field-programmable gate array,fpga)、数字处理器(digital signal processor,dsp)、嵌入式设备等。
121.基于上述装置本发明还提供一种对辊式温控自动挤胶方法,方法中控制模块内置双模式控制主程序c,所述双模式控制主程序c的流程图如图7所示,整个控制流程如下所示:
122.步骤c1:控制箱接通电源,系统上电。
123.步骤c2:控制箱自动完成初始化。
124.步骤c3:操作拨动开关进行模式选择,拨动开关打到左侧为手动模式,跳转至步骤c4;打到中间为停止状态,跳转至步骤c5系统上电初始化时会自动复位到此位置;打到右侧为手动模式,跳转至步骤c6。
125.步骤c4:进入手动控制模式,调用手动控制子程序l,完成处理后程序跳转至步骤c7。
126.步骤c5:进入复位模式,控制箱停止工作,程序调转至步骤c7。
127.步骤c6:进入自动控制模式,调用温度控制子程序rs和电机控制子程序rm,温度控制和电机控制并行处理,处理完成后程序跳转至步骤c7。
128.步骤c7:程序结束。
129.本发明的方法中,还涉及手动控制子程序l,其主要包括转速控制、挤胶控制、退料控制等3个程序段,流程图如图8所示,整个控制流程如下所示:
130.步骤l1:调用手动控制子程序l,程序开始。
131.步骤l2:根据实际需要对控制箱的挤胶按钮、退料按钮、转速调节旋钮、紧急制动按钮等进行操作。
132.步骤l3:当按下挤胶按钮时,触发电机正转信号;当按下退料按钮时,触发电机反转信号,挤胶按钮与退料按钮互锁,即同一时刻只有一个按钮有效;当转动调速旋钮时,触发电机转速信号;当按下紧急制动按钮时,触发电机停转信号,程序跳转至步骤l6紧急制动按钮为整个控制箱的1级响应按钮,其响应的优先程度最高。
133.步骤l4:信号触发后,正转/反转、转速、紧急制动等以电信号的形式传输至驱动模块,电机按照驱动信号进行转动,然后进入步骤l5进行条件判断。
134.步骤l5:当电机驱动信号正常时,程序跳转至步骤l4;当电机驱动信号不正常时,程序跳转至步骤l6。所述驱动信号正常,指的是电机的电压、电流、转速等参数满足公示u是电枢电压,l为线圈的电感量定值,i是电枢电流,r是电枢回路的电阻定值,是励磁磁通定值,k是感应电动势常数定值,di/dt是电流的变化率。
135.步骤l6:电机停转。
136.步骤l7:程序结束。
137.本发明的方法中,还涉及所述温度控制子程序rs的控制流程,如图9所示,整个流程如下所示:
138.步骤rs1:调用温度控制子程序rs,程序开始。
139.步骤rs2:参数设定,具体方法是通过操作控制箱显示屏的“上”“下”“左”“右”“ok”按键,设定电热丝目标温度t
t
、目标温度误差α、温度报警上限ts其中t
t
《ts,通常ts不高于60摄氏度、上限温度误差β;t1、t2温度差δ;当按下紧急制动按钮时,触发电机停转信号,程序跳转至步骤rs8。其中,紧急制动按钮为整个控制箱的1级响应按钮,其响应的优先程度最高。
140.步骤rs3:温度传感器m1、m2采集两挤胶轴实时温度t1、t2,由于两挤胶轴处于相同环境中温差忽略不计,因此后续程序采用实时温度均值t进行温度控制,根据公式计算实时温度均值t,然后进入步骤rs4进行条件判断。
141.步骤rs4:当t≤t
t-α或|t1-t2|≤δ条件同时满足时,程序跳转至步骤rs5;当t≤t
t-α和|t1-t2|≤δ条件不能同时满足时,程序跳转至步骤rs7进行条件判断。注:本步骤作用在于两方面,一方面可避免初始温度高于设定的目标温度时导致程序无法正常运行;另一方面可避免实时温度低于目标温度,但两挤胶轴之一的实时温度高于目标温度时出现意外情况
142.步骤rs5:电热丝通电开始加热升温,控制模块采用模糊pid算法自动调节pid参数模糊pid算法可使挤胶轴温度快速达到目标温度值,响应速度快、超调小、稳定时间短,温度传感器m1、m2继续采集两挤胶轴实时温度t1、t2,根据公式计算温度实时均值t,然后进入步骤rs6进行条件判断。
143.步骤rs6:当t≤t
t-α和|t1-t2|≤δ条件同时满足时,程序跳转至步骤rs5;当t≤t
t-α或|t1-t2|≤δ条件不能同时满足时,程序跳转至步骤rs7进行条件判断。
144.步骤rs7:当t≥t
s-β条件满足时,程序进入步骤rs8;当t≥t
s-β条件不时,程序跳转至步骤rs9。
145.步骤rs8:电热丝断电,程序结束。
146.步骤rs9:电热丝断电并触发报警器,程序结束。
147.本发明的方法中,还涉及电机控制子程序rm,具体包括转速控制、挤胶控制、退料控制等3个程序段,流程图如图10所示,整个控制流程如下:
148.步骤rm1:调用电机控制子程序rm,程序开始。
149.步骤rm2:参数设定,具体方法是通过操作控制箱显示屏的“上”“下”“左”“右”“ok”按键,设定电热丝目标温度t
t
、目标温度误差α、温度报警上限ts其中t
t
《ts,通常ts不高于60摄氏度、上限温度误差β;t1、t2温度差δ。当按下紧急制动按钮时,触发电机停转信号,程序跳转至步骤11。注:紧急制动按钮为整个控制箱的1级响应按钮,其响应的优先程度最高。
150.步骤rm3:温度传感器m1、m2采集两挤胶轴实时温度t1、t2,根据公式计算实时温度均值t,然后程序进入步骤rm4进行条件判断;控制器触发正转信号,然后程序跳
转至步骤rm5。
151.步骤rm4:当t≤t
t-α&|t1-t2|≤δ条件同时满足时,根据函数n=0.02t+1.2转速n与温度t的关系根据工程经验获得计算电机转速n,并触发转速信号传输至驱动模块。
152.步骤rm5:驱动模块接收转速信号和正转信号后,驱动电机以转速n正转,进入挤胶状态,同时记录电机正转圈数p,然后程序跳转至步骤rm6进行条件判断。
153.rm6:当电机驱动信号正常时,程序跳转至步骤rm7进行条件判断;电机驱动信号不正常时,程序跳转至步骤rm11。所述驱动信号正常,指的是电机的电压、电流、转速等参数满足公示u是电枢电压,l为线圈的电感量定值,i是电枢电流,r是电枢回路的电阻定值,是励磁磁通定值,k是感应电动势常数定值,di/dt是电流的变化率。
154.步骤rm7:当红外感应模块检测到遮挡信号时,跳转至步骤rm3;当红外感应模块检测不到遮挡信号时,触发反转信号,进入下一步。
155.步骤rm8:步骤rm4中程序会实时计算电机转速,并触发转速信号,驱动模块接收转速信号和反转信号后,驱动电机以转速n反转,进入退料状态,同时记录电机正转圈数q,然后程序进入步骤rm9进行条件判断。
156.步骤rm9:当电机驱动信号正常时,程序跳转至步骤rm10进行条件判断;电机驱动信号不正常时,程序跳转至步骤rm11。所述驱动信号正常,指的是电机的电压、电流、转速等参数满足公示u是电枢电压,l为线圈的电感量定值,i是电枢电流,r是电枢回路的电阻定值,是励磁磁通定值,k是感应电动势常数定值,di/dt是电流的变化率。
157.步骤rm10:当p=q条件满足时,程序跳转至步骤rm11;当p=q条件不满足时,控制器继续触发反转信号,程序进入步骤rm8。
158.步骤rm11:电机停转。
159.步骤rm12:电机控制完成,程序结束。
160.本发明涉及的实施例中,挤胶方法有两种运行模式,一种是手动挤胶模式,另一种是自动挤胶模式,两种模式的切换和运行通过控制箱7内置的双模式控制主程序c完成。所述双模式控制主程序c主要包括手动控制子程序l和自动控制子程序r,进一步的,所述的手动控制子程序l需根据实际情况操作控制箱7上的按键进而控制装置的挤胶正转、退料反转;所述自动控制子程序r主要包括温度控制子程序rs和电机控制子程序rm,所述自动控制程序r可根据当前温度自动调节电机转速,转速与温度的关系为n=0.02t+1.2根据工程经验获得,用户在完成控制箱7参数设定后,装置可自动完成挤胶正转、退料反转全过程。
161.本发明提供的对辊式温控自动挤胶装置中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
162.本发明提供的对辊式温控自动挤胶装置及方法中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例
如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口、装置或单元的间接耦合或通信连接,也可以是电的,机械的或其它的形式连接。
163.本发明提供的对辊式温控自动挤胶方法是结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
164.本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”“第四”等如果存在是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。
165.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1