一种用于自动分离提取PRP的设备的制作方法
一种用于自动分离提取prp的设备
技术领域
1.本发明涉及prp分离提取技术领域,尤其涉及一种用于自动分离提取prp的设备。
背景技术:
2.目前prp(富血小板血浆platelet-rich plasma,简称prp)在医学手术治疗、骨病治疗等得到很好的临床应用,对患者的疾病预防及康复起到很好的治疗效果。在医学及美容治疗方面将得到广泛临床应用。
3.现阶段存在如下问题:提取prp的浓度及质量达不到要求;自动化程度低,等待时间长;人工提取prp存在视觉的误差;提取的过程需要人工操作完成。为此,我们提出一种用于自动分离提取prp的设备。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了一种用于自动分离提取prp的设备,可以准确无误的自动对离心后的prp进行抽取,避免抽取时的定位差异,造成注射器抽取位置的误差影响抽取prp纯度,不仅实现了全自动化的prp分离和提取,而且提取纯度高,效率高,解决了现有技术自动化程度低,等待时间长;人工提取prp存在视觉的误差;提取prp的浓度及质量达不到要求的问题。
5.本发明提供如下技术方案:一种用于自动分离提取prp的设备,包括离心机、prp抽取装置、prp检测装置、机器人运动装置和放置与废弃装置;
6.所述离心机用于对装有prp的离心管离心,所述机器人运动装置用于将离心前的离心管放入离心机,并将离心后的离心管放入prp检测装置;
7.所述prp抽取装置用于抽取prp检测装置中离心管的prp,并将注射器放置于prp抽取装置的电动夹爪上,以及将抽取后的离心管和注射器针头放入废料回收桶;
8.所述prp抽取装置包括固定针筒的电动夹爪,带动注射器活塞柄运动的第一驱动组件,带动注射器整体移动的第二驱动组件,以及检测注射器针头与prp相对位置的prp层检测模块;
9.所述prp检测装置上设置有用于固定离心管的离心管固定座,以及检测定位prp抽取装置上注射器针头原点的定位模块。
10.优选的,所述prp抽取装置包括外壳钣金罩二、拖链钣金、支撑座、丝杆模组、丝杆电机、注射器活塞柄固定板、注射器针筒、注射器固定块、注射器针头固定块、注射器针头、prp层检测模块固定块和电动夹爪三;
11.所述电动夹爪三设置在丝杆模组上,所述丝杆电机用于带动注射器活塞柄固定板运动,所述注射器固定块与电动夹爪三固定连接,注射器针头固定块固定连接在注射器固定块上,注射器固定块和注射器针头固定块随着电动夹爪三的控制而运动。
12.优选的,所述prp检测装置包括重力传感器、离心管二、离心管固定座、重力传感器固定板、传感器挡光片、限位传感器、电机;
13.所述重力传感器固定板与传感器挡光片固定连接,所述传感器挡光片与电机固定连接,所述电机用于带动传感器挡光片与重力传感器固定板沿电机轴旋转,所述限位传感器用于检测传感器挡光片旋转位置。
14.优选的,所述机器人运动装置、prp抽取装置、prp检测装置、放置与废弃装置均安装在工作台上,所述工作台上还设置有prp配重装置、离心管一、注射器、注射器针头和无菌帽的放置与废弃装置。
15.优选的,所述离心管、注射器、注射器针头和无菌帽的放置与废弃装置,包括外壳钣金罩一和支撑架,以及放置在外壳钣金罩一内部的离心管固定座,废料回收桶固定座和注射器固定座;
16.所述离心管固定座内放置有离心管一,所述废料回收桶固定座内放置有废料回收桶,所述注射器固定座内放置有带注射器针头的注射器。
17.优选的,所述prp配重装置包括配重管和配重管底座。
18.优选的,所述机器人运动装置上设置有机器人夹爪装置,所述机器人夹爪装置包括机器人连接件、电动夹爪连接板、电动夹爪一、电动夹爪二;
19.所述电动夹爪一用于夹取注射器;所述电动夹爪二为l型,用于夹取离心管;
20.所述电动夹爪一的两个夹持面均为三角形,两个三角形在夹爪闭合时组成四边形,且四边形的各个面均与被夹持件贴合;
21.所述电动夹爪二的两个夹持面均为三角形,两个三角形在夹爪闭合时组成四边形,且四边形的各个面均与被夹持件贴合。
22.优选的,所述废料回收桶表面设置有凸台,所述废料回收桶固定座内部设置有凹槽,所述凸台用于插入凹槽中并旋转固定。
23.优选的,所述废料回收桶上设置有针头卡槽和无菌帽。
24.优选的,所述离心机安装在机架的工作台下方,所述机架上设置有电柜及电柜门,所述机架上还设置有控制屏、控制开关和上门。
25.本发明提供了一种用于自动分离提取prp的设备,通过设置机器人运动装置,实现离心管和注射器的自动组装和转运,通过prp抽取装置和prp检测装置的配合,可以准确无误的自动对离心后的prp进行抽取,避免抽取时的定位差异,造成注射器抽取位置的误差影响抽取prp纯度,不仅实现了全自动化的prp分离和提取,而且提取纯度高,效率高,解决了现有技术自动化程度低,等待时间长;人工提取prp存在视觉的误差;提取prp的浓度及质量达不到要求的问题。
附图说明
26.图1为本发明外壳示意图;
27.图2为本发明内部框架示意图;
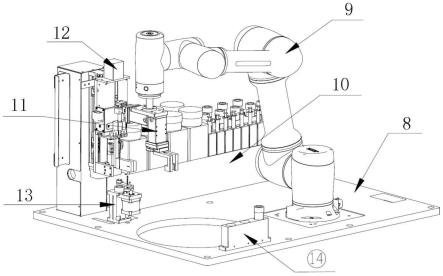
28.图3为本发明工作台示意图;
29.图4为本发明放置与废弃装置示意图;
30.图5为本发明放置与废弃装置部分剖视图;
31.图6为本发明机器人夹爪装置示意图;
32.图7为本发明prp抽取装置示意图;
33.图8为本发明prp抽取装置爆炸图;
34.图9为本发明prp抽取装置部分结构示意图;
35.图10为本发明prp检测装置示意图;
36.图11为本发明prp配重装置示意图;
37.图12为本发明废料回收桶及其固定座剖视图;
38.图13为本发明废料回收桶及其固定座立体图。
39.图中:1、控制屏;2、控制开关;3、上门;4、电柜门;5、机架;6、电柜;7、离心机;8、工作台;9、机器人运动装置;10、放置与废弃装置;1001、外壳钣金罩一;1002、支撑架;1003、离心管固定座一;1004、离心管一;1005、废料回收桶;1005-1、凸台;1006、废料回收桶固定座;1006-1、凹槽;1007、注射器;1008、注射器固定座;1009、无菌帽;1010、针头卡槽;11、机器人夹爪装置;1101、机器人连接件;1102、电动夹爪连接板;1103、电动夹爪一;1104、电动夹爪二;12、prp抽取装置;1201、外壳钣金罩二;1202、拖链钣金;1203、支撑座;1204、丝杆模组;1205、丝杆电机;1206、注射器活塞柄固定板;1207、注射器针筒;1208、注射器固定块;1209、注射器针头固定块;1210、注射器针头;1211、prp层检测模块固定块;1212、电动夹爪三;13、prp检测装置;1301、重力传感器;1302、离心管二;1303、离心管固定座二;1304、重力传感器固定板;1305、传感器挡光片;1306、限位传感器;1307、电机;14、prp配重装置;1401、配重管;1402、配重管底座。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.本发明提供一种技术方案:一种用于自动分离提取prp的设备,包括离心机7、prp抽取装置12、prp检测装置13、机器人运动装置9和放置与废弃装置10;
42.如图1和2所示,离心机7用于对装有prp的离心管离心,离心机7安装在机架5的工作台8下方,机架5上设置有电柜6及电柜门4,用于控制设备的运行和方便维修和操作,机架5上还设置有控制屏1、控制开关2和上门3,用于起到防护作用,同时方便观察和操作。
43.如图3所示,机器人运动装置9用于将离心前的离心管放入离心机7,然后抓取1401配重管放置于1004对称的工位,离心机开始加速离心,并将离心后的离心管放入prp检测装置13;机器人运动装置9、prp抽取装置12、prp检测装置13、放置与废弃装置10均安装在工作台8上,如图4和5所示,工作台8上还设置有prp配重装置14、离心管一1004、注射器1007、注射器针头1210和无菌帽1009的放置与废弃装置10。通过机器人运动装置9抓取和放置离心管一1004、注射器1007、注射器针头1210和无菌帽1009,以及抓取和放置配重装置中的配重管1401,从而实现自动化的离心全过程。
44.离心管一1004、注射器1007、注射器针头1210和无菌帽1009的放置与废弃装置10,包括外壳钣金罩一1001和支撑架1002,以及放置在外壳钣金罩一1001内部的离心管固定座1003,废料回收桶固定座1006和注射器固定座1008;
45.离心管固定座1003内放置有离心管一1004,废料回收桶固定座1006内放置有废料
回收桶1005,注射器固定座1008内放置有带注射器针头1210的注射器1007。设置离心管固定座1003,废料回收桶固定座1006和注射器固定座1008,均是为了方便离心管、废料回收桶1005和注射器1007的放置和定位,方便机器人运动装置9抓取。
46.如图6所示,机器人运动装置9上设置有机器人夹爪装置11,机器人夹爪装置11包括机器人连接件1101、电动夹爪连接板1102、电动夹爪一1103、电动夹爪二1104;
47.电动夹爪一1103用于夹取注射器1007;电动夹爪二1104为l型,用于夹取离心管;
48.电动夹爪一1103的两个夹持面均为三角形,两个三角形在夹爪闭合时组成四边形,且四边形的各个面均与被夹持件贴合;四边形四个面均与注射器1007有接触,能更加牢固的抓取注射器1007。
49.电动夹爪二1104的两个夹持面均为三角形,两个三角形在夹爪闭合时组成四边形,且四边形的各个面均与被夹持件贴合。因配合检测抽取装置尺寸,所以将夹爪设计成l型。与电动夹爪一1103相同,设计为四边形,能更加牢固的抓取离心管。
50.如图7-9所示,prp抽取装置12包括外壳钣金罩二1201、拖链钣金1202、支撑座1203、丝杆模组1204、丝杆电机1205、注射器活塞柄固定板1206、注射器针筒1207、注射器固定块1208、注射器针头固定块1209、注射器针头1210、prp层检测模块固定块1211和电动夹爪三1212;
51.电动夹爪三1212设置在丝杆模组1204上,丝杆电机1205用于带动注射器活塞柄固定板1206运动,注射器固定块1208与电动夹爪三1212固定连接,注射器针头固定块1209固定连接在注射器固定块1208上,注射器固定块1208和注射器针头固定块1209随着电动夹爪三1212的控制而运动。
52.prp抽取装置12用于抽取prp检测装置13中离心管的prp,并将注射器1007放置于prp抽取装置12的电动夹爪上,以及将抽取后的离心管和注射器针头1210放入废料回收桶1005;注射器1007作为prp的存储容器,抽取完成后,需保留放置于注射器固定座1008里。
53.prp抽取装置12包括固定针筒的电动夹爪,带动注射器活塞柄运动的第一驱动组件,带动注射器1007整体移动的第二驱动组件,以及检测注射器针头1210与prp相对位置的prp层检测模块;
54.prp检测装置13上设置有用于固定离心管的离心管固定座1303,以及检测定位prp抽取装置上注射器针头1210原点的定位模块。
55.如图10所示,prp检测装置13包括重力传感器1301、离心管二1302、离心管固定座1303、重力传感器固定板1304、传感器挡光片1305、限位传感器1306、电机1307;
56.重力传感器固定板1304与传感器挡光片1305固定连接,传感器挡光片1305与电机1307固定连接,电机1307用于带动传感器挡光片1305与重力传感器固定板1304沿电机轴旋转,限位传感器1306用于检测传感器挡光片1305旋转位置。
57.通过设置重力传感器1301,当注射器1007针尖触碰到重力传感器1301的位置即为设定的原点。因为机器人每次抓取注射器1007放置于抽取装置时,会有些许位置差异,这种差异会造成注射器1007抽取位置的误差,从而影响抽取prp纯度。注射器1007在离心管的轴线正上方,当注射器1007下移检测到原点时,注射器针头1210通过触碰称重传感器1301,称重传感器发出信号,从而确定原点位置。
58.如图11所示,prp配重装置14包括配重管1401和配重管底座1402。方便机器人运动
装置9直接在工作台8上抓取配重管1401和放置配重管1401,为离心配重。
59.如图12和13所示,废料回收桶1005表面设置有凸台1005-1,废料回收桶固定座1006内部设置有凹槽1006-1,凸台1005-1用于插入凹槽1006-1中并旋转固定。废料回收桶1005上设置有针头卡槽1010和无菌帽1009。针头卡槽1010是方便机器人运动装置9利用其将针头拔出,针头自动掉入废料收集桶中,无菌帽1009是方便机器人运动装置9在拔掉针头后为注射器1007盖上盖上无菌帽1009。凸台1005-1和凹槽1006-1设置是为了利用废料回收桶固定座1006固定废料回收桶1005,避免机器人运动装置9在向上拔针头的时候带动中提起废料回收桶1005,导致针头无法顺利拔掉。
60.工作过程:装有血液的离心管放置于离心管固定座1003当中,机器运行,电动夹爪一1103跟随机器人运动装置9运动,电动夹爪二1104抓取离心管放置于离心机7中,然后抓取配重管1401放置于离心管对称的位置,离心机7开始加速离心。
61.离心完成后,电动夹爪二1104抓取离心管放置于离心管固定座1003当中,抓取配重管1401重新放回配重管底座1402中。电动夹爪一1103抓取放置于注射器固定座1008中的注射器1007,移动放置于注射器活塞柄固定板1206当中,电动夹爪三1212开始运行,带动注射器固定块1208和注射器针头固定块1209夹紧固定注射器针筒1207和注射器针头1210。电机1307带动传感器挡光片1305运行到限位传感器1306处,限位传感器1306接收到信号,丝杆模组1204开始运行带着抽取模块往下运动。
62.注射器针头1210通过触碰称重传感器,称重传感器发出信号,从而确定原点位置。然后电机1307带动重力传感器1301开始转动一定的角度让出位置。
63.注射器针头1210穿破离心管上面的硅胶帽,进入离心管内,prp层检测模块通过离心管固定座1003中间的缝隙从上至下的检测定位prp的位置。丝杆电机1205开始运动,注射器活塞柄固定板1206带动注射器活塞柄开始往上运动,抽取一定量的prp后,注射器活塞柄固定板1206带动注射器活塞柄开始往上运动,到指定地点后,电动夹爪三1212运行,注射器固定块1208和注射器针头固定块1209松开,抽取过程结束。
64.电动夹爪抓取注射器针筒1207,移动到离心管一1004、注射器1007、注射器针头1210和无菌帽1009的放置与废弃装置10前,将注射器针筒1207的针头放置于针头卡槽1010处,向上移动,卡掉针头,然后移动到无菌帽1009上方,盖好无菌帽1009无菌帽1009,最后移动放置于注射器固定座1008内。
65.电动夹爪二1104将抽取完prp的离心管从离心管固定座1003中取出,放入废料回收桶1005中。
66.废料回收桶1005表面设置有凸台1005-1,废料回收桶固定座1006内部设置有凹槽1006-1,将废料回收桶1005放置于废料回收桶固定座1006内,旋转废料回收桶1005,凸台1005-1将沿着凹槽1006-1,刚好卡入,固定。
67.以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1