一种移动式熔盐电解设备工艺参数的测量装置的制作方法
1.本发明属于熔盐电解技术领域,尤其涉及一种移动式熔盐电解设备工艺参数的测量装置。
背景技术:
2.熔盐电解工业,如原铝电解槽、铝精炼电解槽、锂电解槽、稀土电解槽等,是重要的流程行业,但目前该工业自动化、智能化水平普遍较低。随着金属冶炼行业向智能化、绿色低碳方向发展,国内外市场对可自动、快速测量熔体温度、液面高度和阴极压降等工艺参数的测量装置具有很大的市场需求。
3.铝电解是熔盐电解工业产量最重要的组成部分。目前铝电解企业普遍采用人工测量的方法对熔体温度、液面高度和阴极压降进行测量。
4.电解质温度测量:一名工人手持热电偶通过出铝口浸入电解质,待温度稳定后读数和记录,测量频率为1~3次/天。
5.两水平测量:一名工人手持测量杆插入电解槽内,等待一段时间拔出测量杆,另一名工人用板尺测量测量杆上的两道界面痕迹,记录铝液高度和电解质高度,测量频率为1~2次/天。
6.阴极压降测量:一名工人手持铜棒插在阴极钢棒上,另一名工人手持铁棒插入电解槽铝液内,通过电压表测量两端压差,记录阴极压降,测量频率1次/月。
7.以上测量的工艺参数需要手工录入电解控制系统,尤其是针对病槽或重点关注槽时测量频率明显提高,数据测量的时效性差,工作量和误差大,并且存在触电、烫伤等安全隐患。其他熔盐电解工业也存在类似的问题。
8.专利cn201915156u在电解槽上设置固定温度检测探头;cn215413936u在电解槽上部结构上设置装置测量两水平;cn108728868a在电解槽上部结构上设置装置测量两水平和阴极压降,随后cn112665642a增加了温度测量装置。以上现有技术存在一个共同问题,均为针对单独的电解槽设置的固定式测试装置,一个电解系列往往含有数百台电解槽,上述测试装置的单次成本投入和后期维护工作量巨大。cn215598498u虽然将测量设备安装到测量辅助小车上,但仅能对两水平进行测量,温度和阴极压降数据仍需人工测量。
技术实现要素:
9.鉴于现有技术的上述缺点、不足,本发明提供一种移动式熔盐电解设备工艺参数的测量装置,可快速测量高温熔体温度、高度及阴极压降等工艺参数,方便、快捷,提高了测试效率与准确率。
10.为了达到上述目的,本发明采用的主要技术方案包括:一种移动式熔盐电解设备工艺参数的测量装置,包括移动平台,所述移动平台上设有旋转伸缩装置,所述旋转伸缩装置上设有测距探头、测温元件,所述测距探头与位移计
算模块相连,位移计算模块依据测距探头的电信号反馈计算不同熔体高度及阴极压降;所述测温元件与温度计算模块相连,温度计算模块根据测温元件的测量信号计算熔体温度,所述位移计算模块、温度计算模块设置于数据处理基站内,所述数据处理基站与电解车间控制网络相连。
11.进一步地,所述测距探头、测温元件设置于测量杆上,测试时,旋转伸缩装置使测量杆竖向伸入至待测设备中,未测试时,使测量杆旋转横向置于移动平台上方。
12.进一步地,所述旋转伸缩装置包括回转平台、多级推拉机构、机械臂、伸缩机构、测量杆,所述回转平台一侧与移动平台相连,另一侧与多级推拉机构相连,所述多级推拉机构经机械臂与伸缩机构相连,测量杆设置于伸缩机构上。
13.进一步地,所述旋转伸缩装置设置一组或两组,当旋转伸缩装置设置一组时,测距探头、测温元件集成于同一测量杆上,当旋转伸缩装置设置两组时,测距探头、测温元件分别设置于两个测量杆上。
14.进一步地,多级推拉机构包括但不限于气缸、多级气缸、液压缸、电动推杆。
15.进一步地,位移计算模块包括但不限于位移传感器、电子尺、激光测距仪。
16.进一步地,测温元件包括但不限于热电偶、热电阻。
17.进一步地,移动平台采用自动或人工行进和定位,自动方式包括但不限于轨道机器人、轮式机器人和机器狗。
18.进一步地,测量装置的数据通过数据发送系统以有线或无线的形式发送到电解车间控制网络上,或通过u盘等存储工具拷贝到车间控制系统中。
19.本发明的有益效果是:本发明的一种移动式熔盐电解设备工艺参数的测量装置可实现熔盐电解设备(如原铝电解槽、铝精炼电解槽、锂电解槽、稀土电解槽等)内高温熔体温度、高度及阴极压降等工艺参数的测量无人化,提高熔盐电解工艺的自动化智能化水平,降低人工测量的风险和成本,提高了测试效率与准确率,本发明测试装置方便、快捷、简单可靠、成本低、便携性好,适合广大熔盐电解金属冶炼企业推广应用。
附图说明
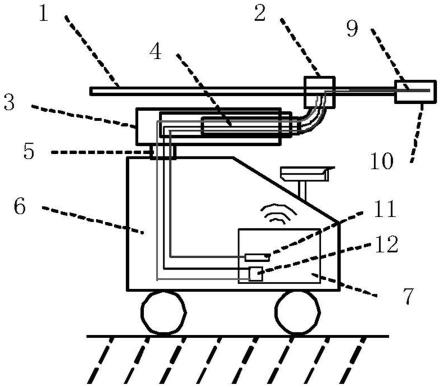
20.图1为本发明实施例1中熔盐电解设备中工艺参数的测量装置结构示意图;图2为本发明实施例1中熔盐电解设备中工艺参数的测量装置测试时结构示意图;图3为本发明实施例2中熔盐电解设备中工艺参数的测量装置结构示意图;图4为本发明实施例2中熔盐电解设备中工艺参数的测量装置测试时结构示意图。
21.图中标记:1为测量杆,2为伸缩机构,3为多级推拉机构,4为信号传输线,5为回转平台,6为移动平台,7为数据处理基站,8为显示终端,9为测温元件,10为测距探头,11为温度计算模块,12为位移计算模块,13为电解质,14为原铝液,15为精铝液。
具体实施方式
22.为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
23.如图1-4所示,本发明提供了一种移动式熔盐电解设备工艺参数的测量装置,包括移动平台6,所述移动平台6上设有旋转伸缩装置,所述旋转伸缩装置上设有测距探头10、测
温元件9,所述测距探头10通过信号传输线4与位移计算模块12连接,在阴极钢棒上设置1组或多组测量端子与位移计算模块12相连,位移计算模块12依据测距探头10的电信号反馈计算不同熔体高度及阴极压降。所述测温元件9通过信号传输线4与温度计算模块11连接,温度计算模块11根据测温元件9的测量信号计算熔体温度,旋转伸缩装置推动测温元件9进入不同熔体,温度计算模块11计算熔体的温度。所述位移计算模块12、温度计算模块11设置于数据处理基站7内,所述数据处理基站7与电解车间控制网络及显示终端8相连。本发明的测量装置可快速测量熔体高度、阴极压降和熔体温度等工艺参数。
24.具体地,测温元件9将测量信号通过信号传输线4传入数据处理基站7的温度计算模块11,当温度稳定后输出电解质温度结果。旋转伸缩装置带动测量杆1缓慢下降,通过测距探头-阴极钢棒压差数据变化判断进入电解质液面和铝液的时刻、位移数据,结合电解槽设计参数可计算得到电解质水平、铝水平和阴极压降结果,并通过显示终端8进行显示。
25.更具体地,所述旋转伸缩装置包括回转平台5、多级推拉机构3、机械臂、伸缩机构2、测量杆1,所述回转平台5一侧与移动平台6固定连接,另一侧与多级推拉机构3固定连接,回转平台5带动多级推拉机构3旋转。所述多级推拉机构3经机械臂与伸缩机构2连接,测量杆1设置于伸缩机构上,所述测距探10、测温元件9设置于测量杆1上,测试时,旋转伸缩装置使测量杆1竖向伸入至待测设备中,未测试时,使测量杆1旋转横向置于移动平台上方。机械臂可带动伸缩机构2在测试时竖直插入至待测熔体中,测试完毕,机械臂带动伸缩机构2旋转90
°
至水平状态,再由伸缩机构2带动测量杆1收回至移动平台6顶部,这样在移动平台6行进或放置时更加顺利,同时也可以保护测试元件。
26.更具体地,所述旋转伸缩装置设置一组或两组,当旋转伸缩装置设置一组时,测距探头10、测温元件9集成于同一测量杆1上,当旋转伸缩装置设置两组时,测距探头10、测温元件9分别设置于两个测量杆上,由两组回转平台5分别带动测距探头10、测温元件9动作。
27.具体地,多级推拉机构包括但不限于气缸、多级气缸、液压缸、电动推杆。
28.具体地,位移计算模块包括但不限于位移传感器、电子尺、激光测距仪。
29.具体地,测温元件包括但不限于热电偶、热电阻。
30.具体地,移动平台采用自动或人工行进和定位,自动方式包括但不限于轨道机器人、轮式机器人和机器狗。
31.具体地,测量装置的数据通过数据发送系统以有线或无线的形式发送到电解车间控制网络上,或通过u盘等存储工具拷贝到车间控制系统中。
32.实施例1如图1和2所示,针对原铝电解槽的多参数移动式测量装置,该装置可对电解质温度、铝水平、质水平和阴极压降进行测量。
33.位移测量系统包括测距探头10、信号传输线4和位移计算模块12;温度测量系统包括测温元件9、信号传输线4和温度计算模块11;位移测量系统和温度测量系统共用一台旋转伸缩装置,包括回转平台5、多级推拉机构3、伸缩机构2和测量杆1;数据发送系统包括数据处理基站7和显示终端8。
34.移动平台6为轮式机器人,多级推拉装置3为三级液压缸,伸缩机构2为螺纹丝杠,并具备行程记录功能。
35.多参数移动式测量车——行进模式
轮式机器人为移动平台1,通过双光云台在车间出铝端自动行进和躲避障碍。在轮式机器人行进过程中,多级推拉装置3和测量杆1等测量设备收回折叠在移动平台上(图1),不影响电解车间内工艺车辆运行和人工操作。
36.多参数移动式测量车——测量模式轮式机器人定位所测量槽号时,停止在电解槽出铝口。回转平台5带动测量设备水平旋转90度,三级液压缸推动伸缩机构2和测量杆1进入电解槽,并将测量杆1垂直旋转90度,使测量杆1与电解槽内电解质13液面垂直,该位置为基准位置。
37.测温过程:伸缩机构2通过螺纹带动测量杆1缓慢进入电解质13液面。测距探头内的测温元件9将测量信号通过信号传输线传入数据处理基站7的温度计算模块,进行温度计算。温度计算完成后,数据处理基站7存储槽号和温度数据,并将温度结果通过无线信号传输到移动终端上。测温过程结束,伸缩机构2带动测量杆1向上运动,直到测距探头10离开电解质液面。
38.该过程也是测距探头的预热过程。
39.测距过程:伸缩机构2通过螺纹带动测量杆1缓慢进入电解质13液面,随后进入铝液14(图2)。在此过程中伸缩机构2的位移记录数据、测距探头-阴极钢棒压差数据实时传送到数据处理基站7的位移计算模块12,进行质水平、铝水平和阴极压降计算。计算完成后,数据处理基站7存储槽号和两水平、阴极压降数据,并将测量结果通过无线信号传输到移动终端上。测距过程结束,伸缩机构2带动测量杆1向上运动到基准位置。
40.三级液压缸将测量杆1垂直旋转90度,使测量杆1与电解槽液面平行,并缓慢回收伸缩机构2和测量杆到电解槽外,回转平台5带动测量设备水平旋转90度,折叠在在移动平台6上部。
41.多参数移动式测量装置行进到下一台电解槽进行测量。
42.测温元件将测量信号通过信号传输线传入数据处理基站7的温度计算模块11,当温度稳定后输出电解质温度结果。伸缩机构2通过螺纹带动测量杆1缓慢下降,通过测距探头-阴极钢棒压差数据变化判断进入电解质13液面和铝液14的时刻、位移数据,结合电解槽设计参数可计算得到电解质水平、铝水平和阴极压降结果。
43.实施例2如图3和4所示,针对精炼铝电解槽多参数移动式测量装置,该装置可对电解质温度、精铝水平、质水平、原铝水平和阴极压降进行测量。
44.位移测量系统包括测距探10、信号传输线和位移计算模块12;温度测量系统包括测温元件9、信号传输线4和温度计算模块12;位移测量系统和温度测量系统各自具备独立的旋转伸缩装置,包括回转平台5、多级推拉机构3、伸缩机构2和测量杆1;数据发送系统包括数据处理基站7和显示终端8。
45.移动平台6为轨道式机器人,多级推拉机构3为电动推杆,伸缩机构2为螺纹丝杠,并具备行程记录功能。
46.多参数移动式测量车——行进模式轨道机器人为移动平台6,通过轨道在车间出铝端自动行进和定位。在轨道机器人行进过程中,多级推拉机构3和测量杆1等测量设备收回折叠在移动平台上(图1),不影响电解车间内工艺车辆运行和人工操作。
47.多参数移动式测量车——测量模式轨道机器人定位所测量槽号时,停止在电解槽出铝口。两个回转平台5分别带动测温和测距设备水平旋转90度,电动推杆推动伸缩机构2和测量杆1进入电解槽,并将测量杆垂直旋转90度,使测量杆1与电解槽液面垂直,该位置为基准位置。
48.测温过程和测距过程同时进行。
49.测距过程中数据处理基站7的位移计算模块12实时进行精铝水平、电解质水平、原铝水平和阴极压降计算。计算完成后,数据处理基站7存储槽号和熔体水平、阴极压降数据,并将测量结果通过无线信号传输到移动终端上。
50.测温元件将测量信号通过信号传输线传入数据处理基站7的温度计算模块,当温度稳定后输出电解质温度结果。伸缩机构2通过螺纹带动测量杆1缓慢下降,通过测距探头-阴极钢棒压差数据变化判断进入电解质液面和铝液的时刻、位移数据,结合电解槽设计参数可计算得到原铝水平、电解质水平、精铝水平和阴极压降结果。
51.其他与实施例1相同。
52.实施例3移动平台6为机械狗,测量完成后的测量结果通过u盘等存储工具拷贝到车间控制系统中。
53.其他同实施例1。
54.实施例4移动平台6为人工推动,其他同实施例1。
55.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1