定位平台和定位系统的制作方法
1.本技术涉及定位平台技术领域,特别是涉及一种定位平台和定位系统。
背景技术:
2.高精密定位平台因其高刚性、高精度、高分辨率、高动态响应等优点,广泛应用于半导体、光学、生物检测、医疗设备等高端领域。
3.现有的高精密定位平台大多由直线电机驱动,一般通过机械弹簧进行配重来平衡负载重力,避免断电或故障状态下掉落造成设备损坏。然而,传统的定位平台在负载变化后,悬停位置会偏高或偏低,无法实现精准悬停。
技术实现要素:
4.基于此,有必要针对现有技术中定位平台在负载变化后,悬停位置会偏高或偏低,无法实现精准悬停的技术问题,提供一种定位平台和定位系统。
5.本技术实施例第一方面提供一种定位平台,该定位平台包括:
6.底座;
7.载物台,所述载物台位于所述底座沿第一方向的一侧,且可沿第二方向相对于所述底座移动,其中,所述第一方向与所述第二方向彼此垂直;以及
8.磁力弹簧,包括沿所述第二方向设置于所述底座的磁棒,以及套设在所述磁棒外侧的磁环;所述磁环与所述载物台连接,以能够在所述载物台带动下沿所述第二方向相对所述磁棒移动;
9.其中,所述载物台和所述磁环在所述第二方向上的距离可调,以使所述载物台负载后相对所述磁棒能够处于目标悬停位置。
10.在其中一个实施例中,所述定位平台还包括支架,所述磁环设置在所述支架上,所述支架固定在所述载物台上;
11.其中,所述磁环和所述支架在所述第二方向上的距离可调。
12.在其中一个实施例中,所述支架包括相互连接的固定部和装配部,所述固定部与所述载物台连接;所述装配部上设有贯穿所述装配部的通孔,至少部分所述磁环位于所述通孔内,所述通孔的侧壁上设置有与所述通孔连通的装配孔,所述装配孔内穿设有紧固件,所述紧固件用于紧固所述磁环。
13.在其中一个实施例中,所述磁棒和所述载物台在所述第二方向上的距离可调。
14.在其中一个实施例中,所述磁棒的两端均设置有螺钉,所述底座上设置有间隔排布的第一端板和第二端板,所述磁棒位于所述第一端板和所述第二端板之间;
15.所述第一端板和所述第二端板上均设置有螺纹孔,所述螺钉穿设在所述螺纹孔内。
16.在其中一个实施例中,所述定位平台还包括保护罩,所述保护罩与所述底座连接,且围设在所述磁力弹簧的外侧。
17.在其中一个实施例中,所述磁力弹簧的数量为多个,多个所述磁力弹簧间隔设置在所述底座上;
18.其中,多个所述磁力弹簧的弹性系数相同;或,至少部分数量所述磁力弹簧的弹性系数不同。
19.在其中一个实施例中,所述定位平台还包括电机,所述电机设置在所述底座上,所述电机的驱动部与所述载物台连接;
20.和/或,所述定位平台还包括位置检测件,所述位置检测件设置在所述底座上,所述位置检测件用于检测所述载物台的位置;
21.在其中一个实施例中,所述底座和所述载物台之间设置限位组件,所述限位组件用于限定所述载物台在所述第二方向上的移动。
22.上述的定位平台,通过使载物台和磁环在第二方向上的距离可调,这样,为了使载物台负载后处于目标悬停位置,可以根据负载的重量调整载物台和磁环之间的距离。上述设置,一方面,可以使定位平台在负载重量不同时,目标悬停位置也能保持一致,实现精准悬停;另一方面,也可以根据需要调整定位平台的目标悬停位置,丰富了定位平台的定位功能。
23.本技术实施例第二方面提供一种定位系统,该定位系统包括第一方面的定位平台。
24.上述的定位系统,通过使定位平台的载物台和磁环在第二方向上的距离可调,这样,为了使载物台负载后处于目标悬停位置,可以根据负载的重量调整载物台和磁环之间的距离。上述设置,一方面,可以使定位平台在负载重量不同时,目标悬停位置也能保持一致,实现定位系统的精准悬停;另一方面,也可以根据需要调整定位平台的目标悬停位置,丰富了定位系统的定位功能。
附图说明
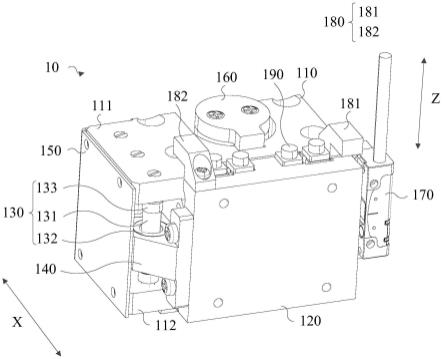
25.图1为本技术一实施例提供的一种定位平台在第一视角下的结构示意图;
26.图2a为图1中的定位平台的一种调整示意图;
27.图2b为图1中的定位平台的另一种调整示意图;
28.图3为图1中的磁力弹簧和支架的结构示意图;
29.图4为图3的俯视图;
30.图5为图4中的a-a剖视图;
31.图6为图1中的底座的结构示意图;
32.图7为图1中的电机的结构示意图。
33.附图标记:
34.10-定位平台;110-底座;111-第一端板;112-第二端板;113-螺纹孔;114-容纳腔;120-载物台;130-磁力弹簧;131-磁棒;132-磁环;133-螺钉;140-支架;141-固定部;142-装配部;143-通孔;144-装配孔;150-保护罩;160-电机;161-定子;162-动子;163-驱动部;170-位置检测件;180-限位组件;181-第一限位件;182-第二限位件;190-导轨。
具体实施方式
35.为使本技术的上述目的、特征和优点能够更加明显易懂,下面结合附图对本技术的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本技术。但是本技术能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似改进,因此本技术不受下面公开的具体实施例的限制。
36.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
37.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
38.在本技术中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
39.在本技术中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
41.定位平台需要说明的是,定位平台可以应用于半导体、光学、生物检测、医疗设备等领域。例如:半导体光刻、微型装配以及生物细胞操作均需要定位平台做技术支持。因此,对于定位平台而言,不仅要求驱动设备有较高的精度和良好性能,以及支撑结构的优良性能,还需要保证整个平台装配的合理性和精密性,方便操作。
42.参照图1所示,本技术实施例第一方面提供一种定位平台,该定位平台10包括:
43.底座110,底座110不仅可以作为定位平台10中其他零件的装配基座,而且可以用于与其他设备(定位平台10以外的设备)装配。定位平台10在工作时,底座110固定不动。
44.载物台120,载物台120位于底座110沿第一方向x的一侧,且可沿第二方向z相对于底座110移动,载物台120用于负载。第一方向x和第二方向z彼此垂直。
45.其中,载物台120可以用于负载操作设备,定位平台10在工作时,载物台120沿第二
方向z移动,同时带动操作设备沿第二方向z移动。
46.以及磁力弹簧130,磁力弹簧130包括磁棒131以及套设在磁棒131外侧的磁环132;磁棒131沿第二方向z设置于底座110上;磁环132与载物台120连接。定位平台10在工作时,载物台120带动磁环132沿第二方向z移动,其中,磁环132在磁棒131上移动,磁棒131和底座110固定不动。可以理解的是,磁力弹簧130属于无源设备,无需任何外部能量供应,即可实现力的输出,无需维护,安全可靠。本技术实施例选用完全无源的磁力弹簧130平衡负载重力,在断电或故障情况下可对定位平台10及载物台120上的设备起保护作用。
47.其中,载物台120和磁环132在第二方向z上的距离可调,以使载物台120负载后相对所述磁棒131能够处于目标悬停位置。
48.需要说明的是,调节载物台120和磁环132在第二方向z上的距离,就是调整初始平衡位置和载物台120在第二方向z上的距离。“初始平衡位置”指:空载时,磁环132在磁棒131上静止的位置。负载时,载物台120受负载重力,载物台120带动磁环132沿第二方向z向下移动,磁棒131和磁环132之间产生磁力,磁环132距离初始平衡位置越远,磁力越大,当磁力与负载重力相等时,载物台120和磁环132停止移动,载物台120此时所处的位置为悬停位置。若悬停位置为预期到达的位置,则为“目标悬停位置”。
49.本技术实施例提供的定位平台10,通过使载物台120和磁环132在第二方向z上的距离可调,这样,为了使载物台120负载后处于目标悬停位置,可以根据负载的重量调整载物台120和磁环132在第二方向z上的距离。上述设置,一方面,可以使定位平台10在负载重量不同时,目标悬停位置也能保持一致,实现精准悬停;另一方面,也可以根据需要调整定位平台10的悬停位置,丰富了定位平台10的定位功能。
50.可以理解的是,磁环132和载物台120之间的距离可以是:磁环132的中心和载物台120的中心在第二方向z上的距离。
51.在其中一个实施例中,如图1所示,定位平台10还包括支架140,磁环132设置在支架140上,支架140固定在载物台120上。在移动时,支架140和载物台120同时移动,二者保持相对固定状态。可以理解的是,支架140和载物台120可以通过螺栓连接,一方面使支架140和载物台120连接稳固,另一方面使支架140和载物台120连接简单,便于拆卸。
52.具体的,在第二方向z上,磁环132和支架140之间的距离可调。其中,磁环132和支架140之间的距离可以是:磁环132的中心和支架140的中心在第二方向z上的距离。由于支架140固定在载物台120上,因此,调整磁环132和支架140之间的距离就是调整磁环132和载物台120之间的距离。并且,由于磁环132设置在支架140上,这样,调整磁环132和支架140之间的相对位置比较方便,降低了定位平台10的调整难度。
53.如图2a所示,图中的h1表示磁环132和磁棒131的初始平衡位置,h2表示目标悬停位置。其中,s’为定位平台10负载5kg的示意图,图中的虚线部分表示支架140和磁环132在空载时所处的位置,负载5kg时,支架140到达目标悬停位置h2。
54.当定位平台10负载6kg时,为了使支架140同样到达目标悬停位置h2,需要对支架140和磁环132的相对位置进行调整。如图2a所示,s为定位平台10负载6kg的示意图,通过调整支架140和磁环132在第二方向z上的相对位置,即:调整支架140和磁环132在第二方向z上的距离,该距离为l。图中的虚线部分表示支架140和磁环132在空载时所处的位置。负载6kg时,支架140到达目标悬停位置h2。
55.通过图2a可以看出,通过调整磁环132和支架140的相对位置,定位平台10分别负载5kg和负载6kg后,支架140均可以到达同一目标悬停位置,避免了负载变化后,悬停位置偏高或偏低,从而实现了精准悬停。
56.可以理解的是,若负载6kg的目标悬停位置与负载5kg的目标悬停位置不同时,也可以通过调整磁环132和支架140的相对位置来实现。本技术实施例在此不一一列举。
57.可以理解的是,在调整支架140和磁环132在第二方向z上的距离时,距离与负载重量有关,不同的负载重量对应不同的距离。在具体的实施中,可以使距离为零时,负载重量为一标准重量,该标准重量可以为该定位平台10最常用的负载重量。当负载重量不是标准重量时,可以调整支架140和磁环132在第二方向z上的距离,以使悬停位置为目标悬停位置。
58.在其中一个实施例中,如图3、图4和图5所示,支架140包括相互连接的固定部141和装配部142,固定部141与载物台120通过螺栓连接。装配部142上设有贯穿装配部142的通孔143,至少部分磁环132位于通孔143内,通孔143的侧壁上设置有垂直于通孔143的装配孔144,装配孔144与通孔143连通,装配孔144内穿设有紧固件(未示出),紧固件紧固后抵接在磁环132上,紧固件的紧固力将磁环132固定在通孔143内。
59.这样,当需要调整磁环132在通孔143中的位置时,松掉紧固件,在通孔143中移动磁环132,调整完成后,紧固紧固件,紧固件的紧固力将磁环132固定在通孔143内。这种设置方式,一方面使支架140的结构简单,制造成本低,另一方面便于调整磁环132,提高了定位平台10的调节效率。
60.在其中一个实施例中,在第二方向z上,磁棒131和载物台120之间的距离可调。可以理解的是,磁棒131和载物台120之间的距离可以是:磁棒131的中心和载物台120的中心在第二方向z上的距离。这样,调整磁棒131和载物台120之间的相对位置,就调整了初始平衡位置和载物台120在第二方向z上的距离。可以理解的是,调整磁棒131和载物台120之间的距离就是调整磁棒131和支架140之间的距离。
61.如图2b所示,图中的h1表示磁环132和磁棒131的初始平衡位置,h2表示目标悬停位置。其中,s’为定位平台10负载5kg的示意图,图中的虚线部分表示支架140和磁环132在空载时所处的位置,负载5kg时,支架140到达目标悬停位置h2。
62.当定位平台10负载6kg时,为了使支架140同样到达目标悬停位置h2,可以使支架140的初始位置不动,调整磁棒131和支架140的相对位置。如图2b所示,s为定位平台10负载6kg的示意图,通过将磁棒131沿第二方向z向上移动,此时初始平衡位置也沿第二方向z向上移动。调整后,初始平衡位置和支架140之间的距离为l。在图2b中可以看到,磁棒131中心和支架140中心的距离由调整前的m1变为调整后的m2。图中的虚线部分表示支架140和磁环132在空载时所处的位置,在该位置时,由于磁环132偏离初始平衡位置h1,支架140承受了一定的弹力。当负载6kg时,支架140到达目标悬停位置h2。
63.通过图2b可以看出,通过调整磁棒131和支架140在第二方向z上的相对位置后,定位平台10分别负载5kg和负载6kg后,支架140均可以到达同一目标悬停位置,避免了负载变化后,悬停位置偏高或偏低,从而实现了精准悬停。
64.可以理解的是,若负载6kg的目标悬停位置与负载5kg的目标悬停位置不同时,也可以通过调整磁棒131和支架140的相对位置来实现。需要说明的是,图2b中,只调整了磁棒
131和支架140在第二方向z上的相对位置,还可以同时调整磁环132和磁棒131相对于支架140的位置,本技术实施例在此不一一列举。
65.在其中一个实施例中,如图5和图6所示,磁棒131的两端均设置有螺钉133,底座110上设置有间隔排布的第一端板111和第二端板112,磁棒131位于第一端板111和第二端板112之间。第一端板111和第二端板112上均设置有螺纹孔113,螺钉133穿设在螺纹孔113内。
66.这样,当需要调整磁棒131的位置时,可以旋转磁棒131两端的螺钉133,通过调整螺钉133在螺纹孔113内的穿设长度来调整磁棒131的位置。这种设置方式,一方面使磁棒131和底座110的结构简单,制造成本低,另一方面便于调整磁棒131,提高了定位平台10的调节效率。
67.在其中一个实施例中,如图1所示,定位平台10还包括保护罩150,保护罩150与底座110连接,且围设在磁力弹簧130的外侧。这样,保护罩150可以阻挡灰尘、油污或其他杂质进入到磁力弹簧130内部,提高了磁力弹簧130的使用寿命和运行可靠性。
68.在其中一个实施例中,如图3、图4和图5所示,磁力弹簧130的数量可以为多个,多个磁力弹簧130间隔设置在底座110上。此外,多个磁力弹簧130可以设置在底座110的任意一侧或多侧。设置多个磁力弹簧130可以提高磁力弹簧130的总弹力,从而使载物台120能够负载较大的重量。
69.在一种可能的实施例中,多个磁力弹簧130的弹性系数可以都相同。这样,由于磁力弹簧130都是同一规格,因此磁力弹簧130装配比较简单,易于装配。
70.在另一种可能的实施例中,至少部分数量磁力弹簧130的弹性系数不同。这样,可以对磁力弹簧130进行灵活组合,从而使磁力弹簧130能够实现多种不同重量的配重,增大载物台120的负载能力范围,实现不同工况、不同负载下任意目标位置的精准悬停。
71.具体的,如图5所示,可以使各磁力弹簧130中的磁棒131的长度不同以及磁环132的长度不同,从而使磁力弹簧130能够实现多种不同重量的配重,增大载物台120的负载能力范围,实现不同工况、不同负载下任意目标位置的精准悬停。本技术实施例对各磁力弹簧130的设置方式不作限定,用户可以根据实际进行选择。
72.在其中一个实施例中,如图1所示,定位平台10还包括电机160,电机160设置在底座110上,电机160的驱动部163与载物台120连接。
73.具体的,如图6所示,底座110上设置有容纳腔114,电机160位于容纳腔114中。示例性的,电机160可以是高推力圆柱型音圈电机。如图7所示,电机160还包括定子161和动子162,其中,定子161固定在容纳腔114的内壁上,动子162位于定子161内部的空隙,且与定子161同轴安装。动子162通过驱动部163与载物台120固定连接。
74.在其中一个实施例中,如图1所示,定位平台10还包括位置检测件170,位置检测件170用于检测载物台120的位置。该位置检测件170可以是纳米级的位置检测件,并且内置有限位开关。限位开关可以防止载物台120移动超限,位置检测件170可以实时检测载物台120的具体位置,并反馈给控制系统,实现闭环、高精度控制。
75.在其中一个实施例中,如图1所示,底座110和载物台120之间设置限位组件180,限位组件180用于限定载物台120在第二方向z上的移动。限位组件180可以防止载物台120过度移动,以及惯性飞车对定位平台10和负载造成冲击损坏。
76.具体的,底座110上可以设置有第一限位件181,第一限位件181对载物台120向上移动的位移量进行限定,载物台120上设置有第二限位件182,第二限位件182对载物台120向下移动的位移量进行限定。
77.此外,底座110靠近载物台120的一侧还设置有直线导轨190,载物台120设置在直线导轨190上。该直线导轨190可以是高负载交叉滚子导轨,这样,可以具有更高的刚性和更低的摩擦系数。
78.可以理解的是,本技术实施例提供的定位平台10,其形状可以根据空间调整,如圆状、扁平状等,并且磁力弹簧130的位置可以任意布置,使定位平台10的结构紧凑。
79.本技术实施例第二方面提供一种定位系统,该定位系统包括第一方面的定位平台10。
80.该定位系统还可以包括x轴定位平台、y轴定位平台和控制系统,控制系统控制x轴定位平台、y轴定位平台和第一方面中的定位平台10的移动,从而实现多自由度的定位功能。
81.上述的定位系统,通过使定位平台10的载物台120和磁环132在第二方向z上的距离可调,这样,为了使载物台120负载后处于目标悬停位置,可以根据负载的重量调整载物台120和磁环132在第二方向z上的距离。上述设置,一方面,可以使定位平台10在负载重量不同时,目标悬停位置也能保持一致,实现定位系统的精准悬停;另一方面,也可以根据需要调整定位平台10的目标悬停位置,丰富了定位系统的定位功能。
82.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
83.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1